.снабжены цитчнка -т 4 крутящего момента, а механизм Д управления усилителем 15, сумматором 16, электромагнитами 17, связанными с гидрораспределителем 18,, которые гидросистемой связаны с насосом 19 и полостями гидроцилиндров. При изменении усилия в нижних тягах 6 вследствие неоднород- ;нести плотности почвы по ширине зах- j вата машины 5 возникает разворачиваго- ;щий момент, который нарушает прямолинейность дви :е1гия ;ir pni .-iT.-i, Сигнал от одного из датчиков 7 поступает нп сумматор 16, с. него - тгп соответствующий электромагнит 17. Последний перемещает золотник гидрораспределителя 18 и рабочая жидкость насосом 19 подается в полость гидродилиндра. Муфты 12 подтормаживают колесо, что обеспечивает компенсацию разворачивающего момента и прямолинейность движения агрегата. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственный агрегат | 1986 |
|
SU1324598A1 |
| Сельскохозяйственный агрегат | 1986 |
|
SU1461381A1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| Сельскохозяйственный агрегат | 1983 |
|
SU1165250A1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| Транспортно-технологическая машина для внутрипочвенного внесения удобрений | 1986 |
|
SU1344272A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Механизм гашения колебаний крюкового усилия трактора в составе машинно-тракторного агрегата | 2015 |
|
RU2614070C1 |
| Электрогидравлическая система автоматического регулирования тяговой загрузки трактора | 1984 |
|
SU1294302A1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к почвообрабатывающим агрегатам для предпосевной обработки почвы и междурядной обработки пропашных культур. Цель изобретения - повьше- ние устойчивости прямолинейного движения агрегата при сохранении стабильности параметров технологического процесса. Сельскохозяйственный агрегат содержит трактор 1, имеющий фрикционные тормозные муфты 2, связанные с конечньп-ш передачами 3, механизм 4 их управления и почвообраба- тьтающую машину 5, соединенную с трактором посредством механизма навески. В нижних тягах 6 механизма навески установлены датчики 7 тягового усилия. Внутри муфт 2 установлены подпружиненные пружины 11 и фрикцион- ные ступицы 12. Задние колеса 13, |(Л Л7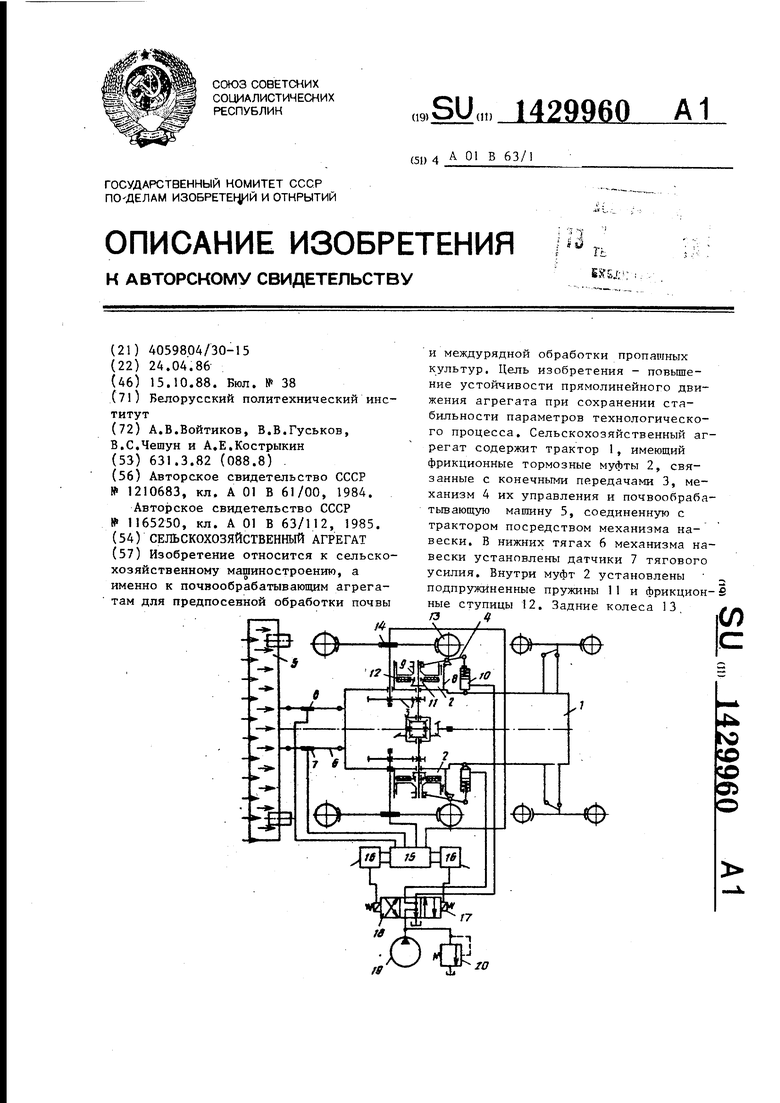
1
Изобретение относится к сельско- :хозяйственному машиностроению, а (именно к почвообрабатывающим агрега- там для предпосевной обработки почвы и междурядной обработки пропашных культур. ,
Цель изобретения - повышение устойчивости прямолинейного движения агрегата при сохранении стабильности параметров технологического продесса. На чертеже изображен сельскохозяйственный агрегат, вид сверху.
Сельскохозяйственный агрегат со- держит трактор 1, имеющий фрикционные тормозные муфты 2, связанные с конечными передачами 3, механизм их управления 4 и почвообрабатывающую машину 5, соединенную с трактором 1 посред- ством механизма навески, в нижних тягах 6 которого установлены датчики 7 тягового усилия. Каждая фрикционная муфта 2 выполнена в виде жестко установленного на заднем ведущем стакана 8 с-внутренней поверхностью, выполненной в виде шлицев, в которых перемеп1аются нажимные диски 9, кинематически посредством механизма управления 4 связанный с гидроцилинд- рами 10, установленными на тракторе. Внутрц муфт 2 установлены подпружиненные пружинами 1 фрикционные ступицы 12, Чадние колеса 13 трактора 1 снабжены датчиками 14 крутящего момента, а механизм управления 4 усилителем 15, сумматорами 16, электромагнитами 17, связанными с гидрораспре- делителпми J8, которые гидросистемой связаны с насосом 19, полостями гид
j 0 5 о
5
роцилиндров 10 и предохранительным клапаном. Датчики 7 и 14 посредством электрической цепи связаны с гидрораспределителями 18 гидроцилиндров 10 и предохранительным клапаном 20.
Устройство работает следующим образом.
При движении агрегата по возделываемому полю в нижних тягах 6 возникают тяговые усилия, обеспечивающие преодоление сопротивления почвы рабочими органами почвообрабатывающей машины 5. На выходах датчиков тягового усилия 7 и датчиков крутящего момента 14 появляются пропорциональные измеряемым величинам сигналы, которые через усилитель 15 подаются на соответствующие входы сумматоров 16« При совпадении направления действие результирующей тягового сопротивления с осью симметрии почвообрабатывающей машины 5 усилия на тягах 6 равны, равны и касательные силы тяги бортов трактора 1, в результате обеспечивается равенство сигналов на входах сумматоров 16 и ноль на их выходах. При этом на электромагнитах распределителя 18 питание отсутствует, поэтому золотник распределителя 18 занимает нейтральное положение, масло от насос-а ,19 и из полостей гидроцилиндров 10 идет на слив, фрикци- онные муфты 2 разомкнуты и агрегат движется прямолинейно.
При изменении усилия в нижних тя- 1 ах 6 вследствие неоднородности плотности почвы по ширигге захвата машины 5 возникает разворачиваю чий
момент, который нарушлет прямолинейность движения агрегата. Например, на левой нижней тяге возникло усилие большее, чем на правой, сразу на вы- ходе сумматора 16 появится сигнал, который поступит на левый электромагнит 17, последний переместит золотни распределителя 18 влево и рабочая жидкость от насоса 19 пойдет в по- лость правого гидроцилин,цра 10, а полость левого гидроцилиндра сообщается со сливом. При этом наткимной диск 9 поджимается к фрикционной ступице 12, подтормаживая правое колесо, при чем тормозной момент тем больше, чем больше сжатие пружин 11, В результате крутящий момент правого KOJleca увеличивается. Одновременно возрастает крутящий момент на левом колесе, что вызывает повышение его силы тяги Крутящий момент, возникающий от разности касательных сил тяги на колеса способствует преодолению разворачивающего момента от разности тяговых усилий в нижних тягах 6 механизма навески и стабилизирует прямолинейност движения агрегата.
Сигнал, поступающий от датчиков крутящего момента 14, установленных на левом копесе, через усилитель 15 подается на вход сумматора 16. При этом полярность сигнала, подаваемого от датчика крутящего момента 14 на вход сумматора 16 противоположна по
лярности сигнала, поступающего от датчиков 7 тягового усилия. Таким образом, связь сумматоров 16 с датчиками крутящего момента 14 является обратной связью и обеспечивает следящее действие фрикционных тормозных муфт. в зависимости от разности усилий в нижних тягах 6 механизма навески.
Ф о
Поскольку при работе сепьскохспяйст- веиного агрегата величина и направление действия развор11чиваемого момента машины меняется по случайному закону, то и подтормаживание колес происходит постоянно со следящим действием раяворачипак}п;его момента.
Использование предлагаемого устройства позволяет повысить устойчивость прямолинейного движения агрегата при сохранении стабильности параметров технологического процесса.
рмула изобретения
Ф о
Сельскохозяйственный агрегат, содержащий трактор, имеющий фрикционные тормозные ъгуфтьт, связанные с конечными передачами, механизм их управления и почвообрабатывающую маши- ну, соединенную с трактором посредством механизма навески, в нижних тягах которого установлены датчики тягового усилия, выходы которых подключены к входам усилителя, и гидроцилиндры одностороннего действия с электроуправ- ляемым распределителем, о т л и - ч а ю щ и и с я тем, что, с целью повышения устойчивости прямолинейного движения агрегата при сохранении стабильности параметров технологического процесса, он дополнительно снабжен датчика и крутящего момента и сумматорами, при этом гидр цитгинд- ры установлены на тракторе и кинематически связаны с механизмом управления фрикционными тормозными муфтаьт, а выходы датчиков крутящего момента соединены с входами усилителя, выходы которого связаны с входами сумматоров, а выходы сумматора соединены с электроуправляемым распределителем.
| Почвообрабатывающая машина | 1984 |
|
SU1210683A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сельскохозяйственный агрегат | 1983 |
|
SU1165250A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
