Изобретение относится к машиностроению, в частности к автоматическому регулированию заранее заданного углового положения рабочей поверхности, например стола металлорежущего станка и т.п.
Целью изобретения является повышение динамических свойств, точности и надежности регулятора.
На чертеже изображен регулятор положения рабочей поверхности.
Регулятор установлен на рабочей поверхности А и содержит корпус 1 с внутренней цилиндрической камерой 2, где размещен золотник 3,снабженный кольцевой проточкой 4. Золотник 3 ус- т новлен на аэростатических опорах с кольцевыми карманами 5 и 6, питаемыми от.напорной магистрали 7 через входные сопротивления 8 - 11 и четыре сопротивления, расположенные в плос- кости, перпендикулярной плоскости чертежа. В середине внутренней камеры 2 (против,кольцевой проточки 4 золотника 3 расположен центральный ввод напорной магистрали 7. Цилиндрические рабочие поверхности золотника 3 (от кольцевой проточки 4 в обе стороны) образуют с соответствующими поверхностями внутренней камеры 2 дросселирую
щие зазоры L
и
Ч
12
заканчивающиеся проточками 12 и 13, которые являются питающими полостями выравнивающих опор 14 и 15, соединенных с ними соответствующими питающими магистралями 16 и 17. За кольцевыми питающими полостями 12 и 13 расположены подпорные дросселирующие щели М, и Mj, образованные нарулшой поверхностью золотника 3 и внутренней поверхностью корпуса 1. После щелей М и М2ИДУТ сливные полости 18 и 19, соединенные с общим сливом 30, и кольцевые карманы 5 и 6. В образованных крьпиками 20 и 21 и торцами золот- ника торцовых полостях 22 и 23 расположены пружины 24 и 25, которые вместе с корпусом золотника 3 могут смещаться вдоль его оси при помощи микрометрических винтов 26 и 27. Вырав- нивайщие опоры 14 и 15 находятся на поверхности В, положение которой относительно плоскости горизонта может меняться в определенных пределах (на угол ). Выравнивающие опоры снабжены дополнительными автоматически регулируемыми дросселями 28 и 29, сопротивление которых является функ
5
0
5
цией длины выравнивающей опоры (например, золотникового типа).
Регулятор работает следующим образом.
При наклонном положении регулятора, т.е. при наклоне поверхности В на угол of , рабочей поверхности А - на угол f , например влево (фиг. 1), на золотник 3 действует горизонтальная составляющая силы веса золотника 3. Под действием этой силы золотник 3 начинает перемещаться влево по карманам 5 и 6 в полость 22. При этом длина входной перемычки в левую питающую полость уменьшается, а в правую - увеличивается. При этом расход рабочей среды в левую выравнивающую опору 14 возврастает, а в правую 15 - уменьшается. Под действием избыточного да вления равновесие между силой веса, приходящейся на левую опору 14, и силой давления в ней нарушается (сила давления превысит вес), и левая опора начинает удлиняться, а правая - опускаться. Сливное сопротивление дросселя 28 при этом уменьшается, а дросселя 29 - увеличивается. И так происходит до тех пор, пока между
0
сопротивлениями (L и 28;
Lj и 29)
5
0
не установится определенное соотношение, соответствующее равенству расходов через дроссель 28 и щель М, , с одной стороны, -и - L.J - с другой (соответственно, дроссель 29 и щель М/, с одной стороны, и зазор Lj. - с другой) . Этому положению соответствует угол 1 наклона оси регулятора.
При заданном угле о угол {Ь (т.е. ошибка позиционирования) тем меньше, чем меньше жесткость пружин 24 и 25.
Угол /1 можно сделать равным нулю (и тем самым исключить ошибку стабилизации) , для этого при помощи микрометрических винтов 26 и 27 золотник 3 надо сместить влево на величину лЬ,, в результате возникает момент, который поворачивает золотник по часовой стрелке на угол f, .
Таким образом можно регулировать положение поверхности А в пределах угла Лмакс определяемого длиной перемычек (L) и жесткостью пружин.
Предлагаемый регулятор целесообразно использовать для стабилизации 55 углового положения буровых платформ, столов станков и т.д., а также там, где требуется управлять угловым положением объекта относительно плос0
кости горизонта с точностью до угло- вой секунды.
Формула изобретения
1. Регулятор положения рабочей поверхности,установленной на вьфавни- вающих опорах с изменяющейся высотой и с рабочей средой под давлением, содержащий корпус с внутренней цилиндрической камерой, на цилиндрической поверхности которой выполнены кольцевые карманы гидро- или газостатических подшипников, соединенные с напор- 5 выравнивающих опор снабжена выходной магистралью, а также установленный в корпусе на упомянутых подшипниках золотник с цилиндрической рабочей поверхностью и питающую магистраль, сообщающую камеру регулятора с . его выравнивающими опорами, отличающийся тем, что, с целью повышения динамических свойств, точности и надежности работы, он снабжен сообщающейся с полостями регулятора между торцами золотника и камеры корпуса сливной,магистралью, а также центрирующими упругими элементами с настроечно-задающими средствами, установленными между торцами золотника и камеры корпуса, на наружной цилиндрической поверхности золотника в его центральной части выполнена кольцевая
Редактор А. Маковская Заказ 4903/36
Техред л.Олийнык Корректор
Тираж 755Подписное
ВНИИПИ Государственного комитета СССР
.по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г. Ужгород, ул. Проектная, 4
5
ю 49774
проточка,- полость которой сообщена с напорной магистралью, на внутренней цилиндрической поверхности камеры корпуса выполнены попарно расположенные между каждым из карманов гидро- или газостатических подшипников и подводом рабочей среды от напорной магистрали в полость кольцевой проточки золотника кольцевые канавки, одна из которых, расположенная около . упомянутого кармана, сообщена со сливной магистралью,- а другая - с питающей магистралью, при этом каждая
0
5
0
ным дросселем с изменяющимся сопротивлением в зависимости от длины опоры.
2.Регулятор положения по п. 1, отличающийся тем,что упомянутые кольцевые карманы подшипников и кольцевые канавки расположены симметрично относительно входа напорной магистрали.
3.Регулятор положения по пп. 1 и
2,отличающийся тем, что длина центральной кольцевой проточки золотника равна его удвоенному ходу.
I
4.Регулятор положения по пп. 1 3,отличающийся тем, что 1настроечно-задающее средство выполнено в виде микрометрического винта.
Составитель Т. Хромова
Техред л.Олийнык Корректор С. Черни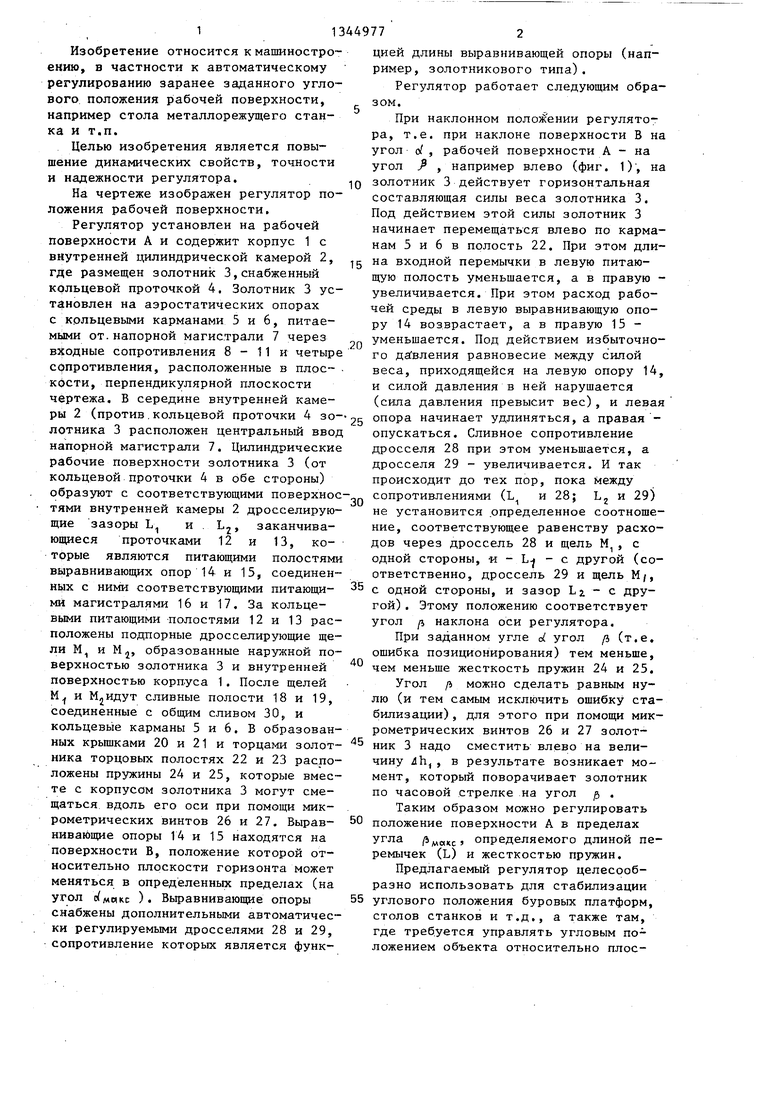

| название | год | авторы | номер документа |
|---|---|---|---|
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Гидропневматическое ударное устройство | 1983 |
|
SU1102926A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| Гидросистема для управляемого перемещения станочных узлов | 1974 |
|
SU559808A1 |
| Гидропневматическое ударное устройство | 1977 |
|
SU1044058A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| Гидромолот | 1980 |
|
SU962456A1 |
| Гидравлическое реле времени | 1968 |
|
SU482723A2 |
| Гидропневмоударная трамбовка | 1990 |
|
SU1742417A1 |
Изобретение относится к машиностроению, в частности к автоматическому регулированию углового положения рабочей поверхности, например стола металлорежущего станка. Целью изобретения является повышение динамических свойств,точности и надежности работы. При нарушении заданного положения рабочей поверхности золотник регулятора стремится занять такое положение относительно питающих кольцевых канавок, при котором давление в выравнивающих опорах стремится вернуть поверхность А в заданное положение. Точность позиционирования определяется жесткостью пружин, а угол задается микрометрической резьбой винтов. Для обеспечения работоспособности, регулятора в вьфавнивающих опорах имеются автоматически регулируемые дроссели, сопротивление которых является функцией длины вьфавнивающей опоры. 3 з.п. ф-лы.. 1 ил. (Л со 4 4 Г) 
| Регулятор положения рабочей поверхности | 1979 |
|
SU863902A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
