10
13453
Изобретение относится к вычислительной технике и технике связи, является усовершенствованием изобрете- нля по авт. св. № 1264347 и может быть использовано в системах передачи информации.
Цель изобретения - повышение точности преобразователя путем умень- щения ошибки аппроксимации..
На фиг. 1 представлена функциональная схема предлагаемого преобразователя импульсно-кодомодулированно- го (ИКМ) сигнала в дельта-модулирован- ный (дм) сигнал; на фиг. 2 и 3 - вре-15 менные диаграммы, иллюстрирующие работу преобразователя.
Преобразователь ИКМ-сигналов в ДМ- сигналы содержит входной регистр 1, цифровой экспандер 2, регистр 3 памя- 2о ти, вычитатель 4, первый и второй блоки 5 и 6 контроля, корректор 7 ошибки, кодопреобразователь 8, выходной регистр 9, регистр 10 знака, формирователь 11 выходного сигнала и синхрони- 25 затор 12. На фиг. 1 обозначены информационный вход 13, вход 14 синхронизации, тактовый вход 15 и выход 16. Кроме того, на фиг. 1 Используются следую(цие обозначения сигналов:
30
(t)
)
/t)
..N;(t)
) .v(t)
g(ty...N(t) - цифровые сигналы на выходах входного регистра 1;
цифровые сигналы на выходах цифрового экспандера 2; цифровые сигналы на выходах регистра 3 памяти; цифровые сигналы на первых выходах вычитателя 4; сигнал на втором выходе вычитателя 4;
сигнал на третьем выходе вычитателя 4;
сигнал на выходе первого блока 5 контроля; сигнал на выходе второго блока 6 контроля;
D,(t).-..D(t) - цифровые сигналы на выходах кодопреобразователя 8;
|(t) V4(t) Z(t) A(t) 0
5
о 25
0
35
0
5
0
5
D(t) - сигнал на выходе выходного регистра 9;
S(t) - сигнал на выходе регистра 10 знака;
E(t) - синхросигнал на первом выходе синхронизатора 12 для входного регистра 1;
H(t) - синхросигнал на втором выходе синхронизатора 12 для цифрового экспандера;
M(t) - цифровой синхросигнал на третьем выходе синхронизатора 12 для регистра памяти 3;
Q(t) - цифровой синхросигнал на четвертом выходе синхронизатора 12 для вычитателя 4;
B(t) - цифровой синхросигнал на пятом выходе синхронизатора 12 для выходного регистра 9;
тактовые сигналы ДМ на шестом выходе синхронизатора 12 для выходного регистра 9; .
P(t) - ци фровой синхросигнал на седьмом
выходе синхронизатора 12 для регистра 10 . знака;
K(t) - цифровой синхрб- сигнал на восьмом выходе синхронизатора 12 для блоков 5 и 6 контроля.
Первый блок 5 контроля служит для определения одинаковости символов сигнала Ф(t) в текущем и в предьщу- щем циклах ИКМ. Он может быть реализован на двухразрядном регистре сдвига и элементе эквивалентности.
Второй блок 6 контроля служит для индикации наличия сигнала V4(t) с
fc(t)
. - .
третьего выхода вычитателя 4 в текущем и предыдущем циклах ИКМ при однвременном наличии сигнала Z(t) с блка 5. Блок 6 может быть реализован на двухразрядном регистре сдвига и элементе И.
Корректор 7 построен на базе ариметико-логического блока и обеспечивает добавление единицы к входному коду разности V., (t) . . ,V.. (t) при нал
чии сигнала A(t) с выхо да блока 6.
Преобразователь ИКМ-сигналов в ДМ сигналы работает следующим образом. Аналогично прототипу стандартный 32-канальный ИКМ-сигнал поступа ет на вход входного регистра 1, где осуществляется переход из последовательного кода в параллельный, после чего он поступает на цифровой экспандер 2 с выхода которого снимается код выборок линейного ЙКМ-сигнала (сигналы Njj(t)...N;, (t;. Код выборки сигнала линейной ИКМ поступает на регистр 3 памяти, где хранится код предыдущей выборки ИКМ-сигнала. Вычитатель 4 определяет разность кодов двух соседних выборок линейного ИКМ-сигнала (сигналы V,(t)...V4(t) и знак этой разности (сигнал 0(t). При этом на выходе вычитателя 4 используется еще один разряд V(t). Если этот разряд в данном ИКМ-цикле имеет уровень 1 то этот сигнал запоминается в блоке Если и в следующем цикле ИКМ этот синал имеет уровень 1, то на корректор 7 поступает цифровой сигнал A(t) который управляет работой корректора 7.
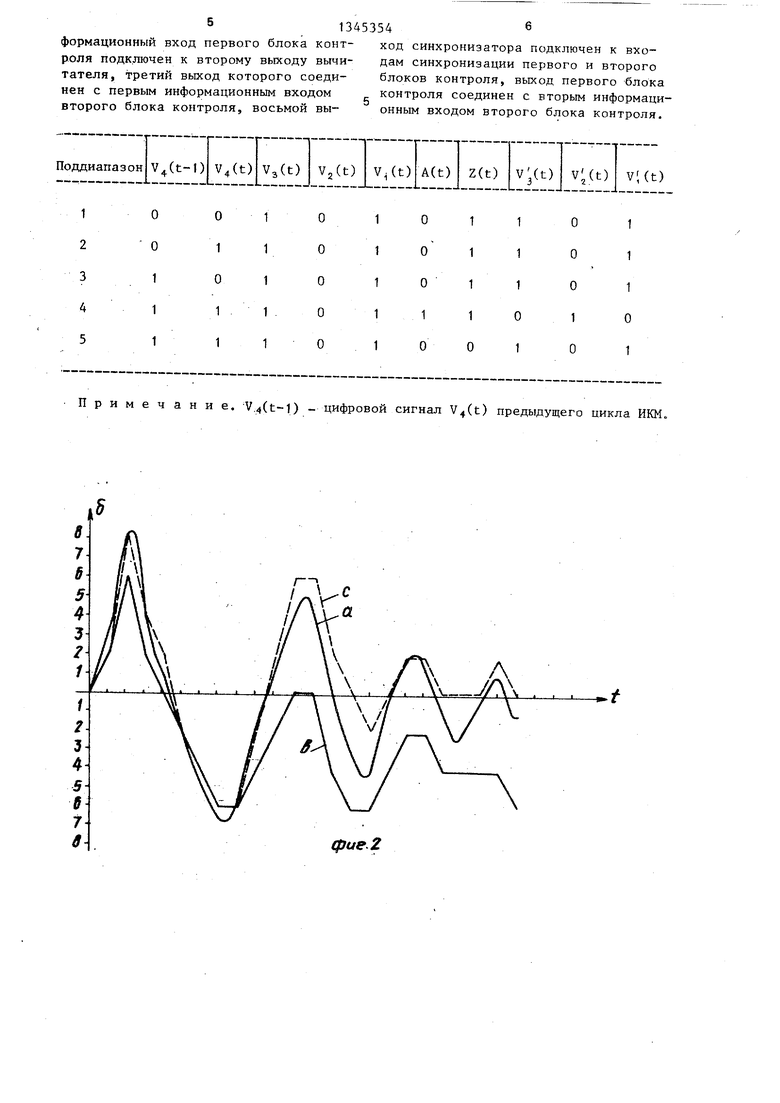
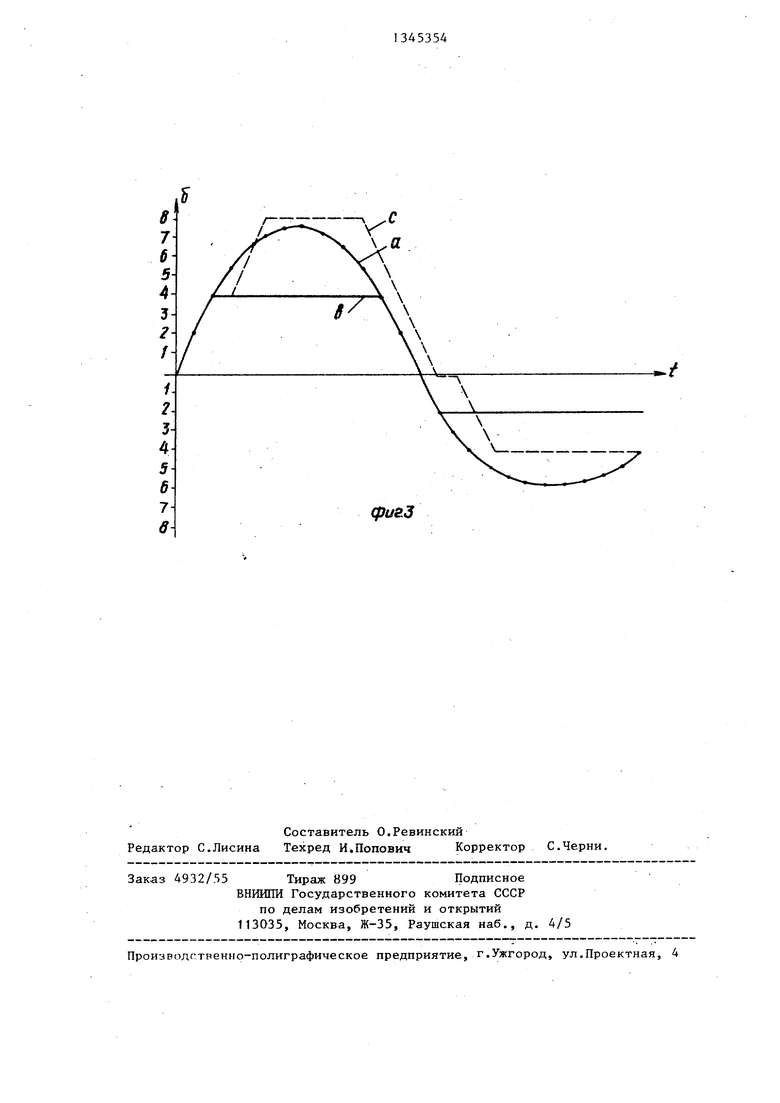
Процесс и результат устранения накопленной ошибки виден на фиг. 2 и 3, где применены следующие обозначния аналоговых сигналов:
а - аналоговый сигнал на входе ИК
кодера;
b - аппроксимирующий сигнал на выходе ДМ-декодера при отсутствии блоков 5 и 6 контроля в ИКМ-ДМ-преобразователе; с - аппроксимирующий сигнал на выходе ДМ-декодера с применением блоков 5 и 6 контроля в ИКМ-ДМ-преобразователе.
На фиг. 2 изображены формы сигналов b и с при быстро меняющемся сигнале и на входе ИКМ-кодера, а на фиг. 2 - те же сигналы при медленно меняющемся аналоговом сигнале а.
0
Алгоритм устранения ошибок на середине поддиапазонов разностей можно представить в виде таблицы.
В прототипе разбиение диапазона разностей на равномерные поддиапазоны приводит к появлению ошибки на середине каждого поддиапазона. Путем запоминания этой ошибки в блоке 6 и приближенного исправления ее в следующем цикле ИКМ достигается более близкое совпадение форм восстановленного (сигнала с)-и исходного(сигнала а) сигналов, как это видно на 5 фиг. 2 и 3. Блок 5 контроля введен для того, чтобы коррекции ошибки не происходили при разных знаках разнос- /ти р(t), так как при этом имело бы место увеличение ошибки аппроксима- 0 ции в последующих циклах ИКМ-сигнала.
Управление блоками 6 контроля осуществляется синхросигналом K(t) с восьмого выхода синхронизатора 12, расположенным по времени между сиг- 5 налами Q(t) и B(t). Корректор 7 имеет защиту от переноса в старший разряд, так как добавление к максимально возможному числу единицы недопустимо. Сигнал V (t) .. .V ,(t) с выхода корректора 7 поступает на кодопреобразователь 8, построенный на ПЗУ, и далее - на выходной регистр 9, с выхода которого да-сигнал через .формирователь 11 выходного сигнала поступает на выход 16.
Таким образом достигнуто увеличение отношения сигнал/шум (на несколько дБ) вследствие уменьшения ошибки аппроксимации. Наиболее эффективна работа корректора при малых уровнях входного сигнала, когда защищенность ДМ и ИКМ-кодеров несколько ниже, чем на границе перегрузки.
0
5
0
Формула изобретения
Преобразователь импульсно-кодомо- дулированных сигналов в дельта-моду- лированные сигналы по авт. св. № 1264347, отличающийся тем, что, с целью повьш1ения точности преобразователя за счет уменьшения ошибки аппроксимации, в него введены первый и второй блоки контроля и корректор ошибки, между первыми выходами вычитателя и входами кодопреобразователя подключен корректор йшибки, управляющий вход которого подключен к выходу второго блока контроля, ин51345354
формационный вход первого блока конт- ход синхронизатора подключен к вхо- роля подключен к второму выходу вычи- дам синхронизации первого и второго тателя, третий выход которого соеди- блоков контроля, выход первого блока
нен с первым информационным входом второго блока контроля, восьмой выПримечание. V.Ct-l) - цифровой сигнал V4(t) предыдущего цикла ИКМ.
контроля соединен с вторым информационным входом второго блока контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь импульсно-кодомодулированных сигналов в дельта-модулированные сигналы | 1985 |
|
SU1264347A1 |
| Устройство для преобразования импульсно-кодомодулированных сигналов в дельта-модулированные сигналы | 1988 |
|
SU1599995A1 |
| Преобразователь сигналов с импульсно-кодовой модуляцией в сигналы с адаптивной дельта-модуляцией со слоговым компандированием | 1990 |
|
SU1709537A1 |
| Преобразователь сигналов с адаптивной дельта-модуляцией со слоговым компандированием в сигналы с нелинейной импульсно-кодовой модуляцией | 1990 |
|
SU1762411A1 |
| Преобразователь дельта-модулированного сигнала в импульсно-кодомодулированный сигнал | 1985 |
|
SU1282336A1 |
| Универсальный дельта-кодек | 1982 |
|
SU1078612A1 |
| Преобразователь дельта-модулированного сигнала в импульсно-кодово-модулированный сигнал | 1986 |
|
SU1347190A1 |
| Система передачи и приема цифровой информации | 1985 |
|
SU1288923A1 |
| Преобразователь дельта-модулированного сигнала в импульсно-кодово-модулированный сигнал | 1988 |
|
SU1533006A1 |
| Устройство связи с дельта-модуляцией | 1986 |
|
SU1365364A1 |
Изобретение относится к вычислительной технике и технике связи, является усовершенствованием изобретения по авт. св. № 1264347 и может быть использовано в системах передачи информации. Цель изобретения - повышение точности преобразователя за счет уменьшения ошибки аппроксимации. Преобразователь содержит входной регистр 1, цифровой экспандер 2, регистр 3 памяти, вычитатель 4, кодопреобразователь 8, выходной регистр 9, регистр 10 знака, формирователь 11 выходного сигнала и синхронизатор 12. Введение блоков 5, 6 контроля и корректора 7 обеспечивает более гибкое отслеживание входного сигнала. 3 ил. с S (Л ю
фие.2
фигЗ
| Преобразователь импульсно-кодомодулированных сигналов в дельта-модулированные сигналы | 1985 |
|
SU1264347A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
