13465622
Изобретение относится к подъемно- ,низмом (не показан) . При этом подвес-
транспортной технике и предназначенока 1 и корпус 9 могут быть смонтиропреимущественно для затворов гидро-ваны как на захватной балке, так и
технических сооружений.2непосредственно на подвеске подъемноЦель изобретения - повышение на-го механизма. В качестве примера подежности в работе захватного органа.казане размещение корпуса 9 на рычажНа фиг.1 изображено устройство,ном подающем механизме 16, который
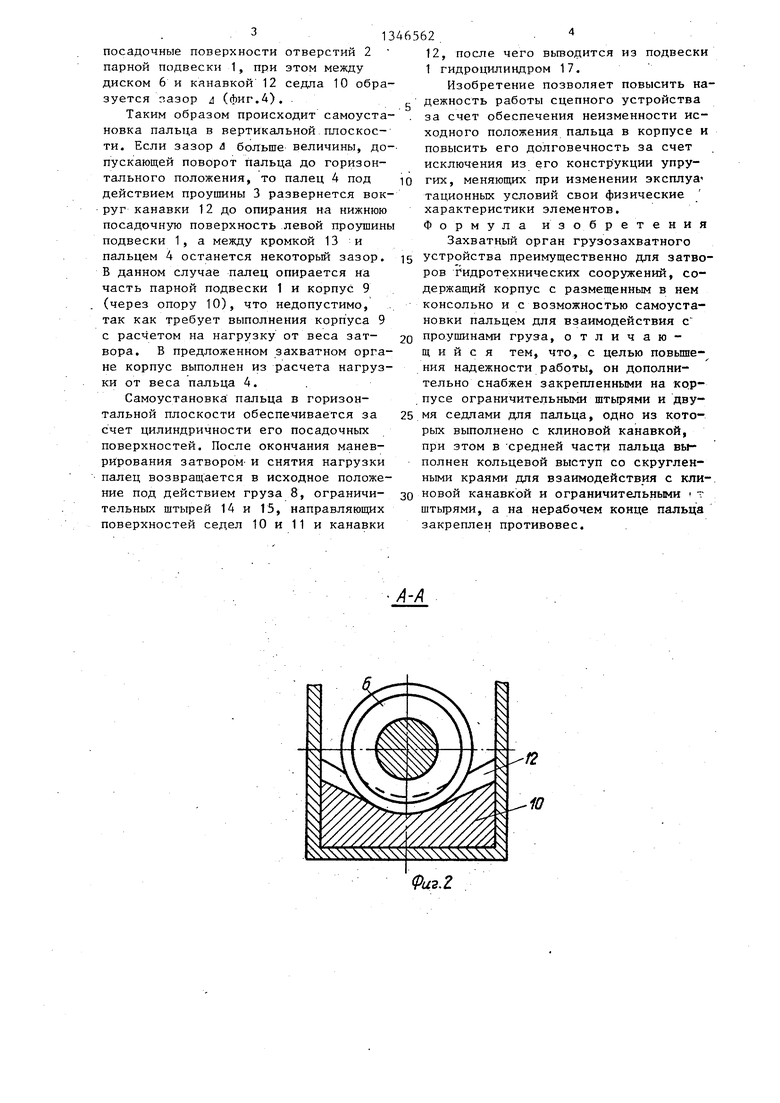
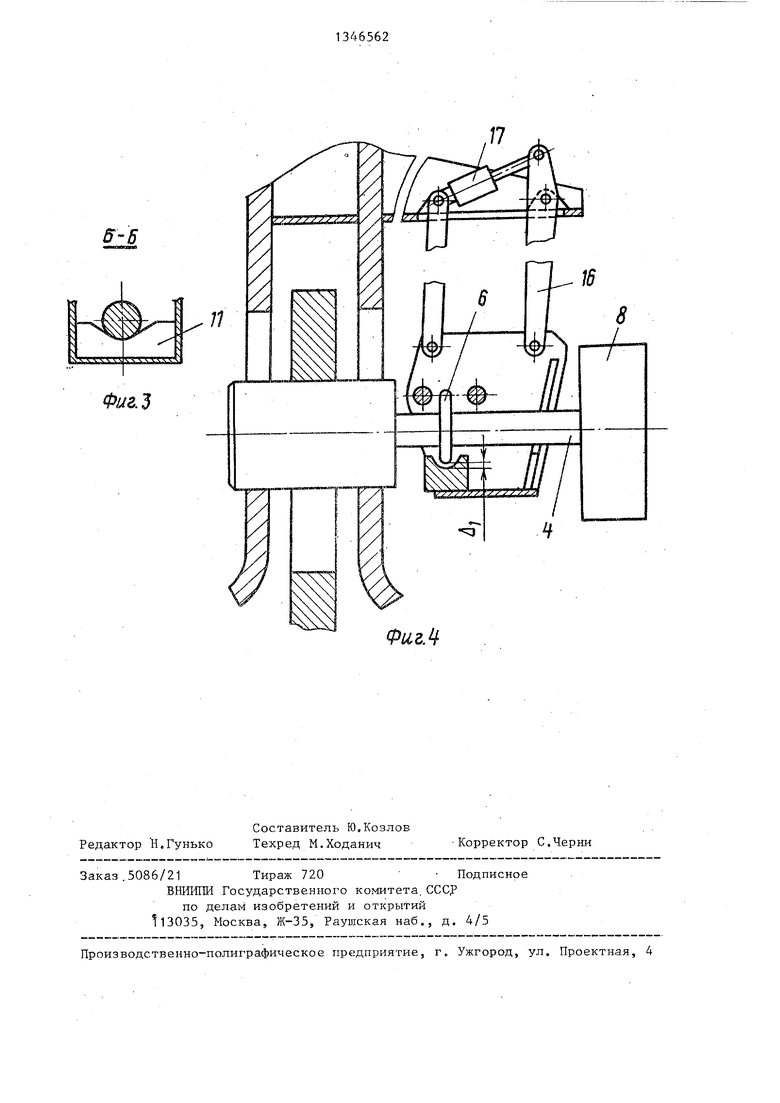
общий, вид; на фиг.2 - разрез .А-А науправляется гидроцилиндром 17. фиг.1; на фиг.З - разрез Б-Б нафиг. Устройство работает следующим обна фиг.4 - конечное положение злемен-разом..
тов устройства при подвешенном ,на Для сдепления с гидротехническим
нем затворе.затвором или другим грузом, оснащёнЗахватный орган является частьюным проушиной 3, сцепное устройство
грузозахватного устройства и содержит 15опускают с помощью подъемного механизгрузовую подвеску 1, состоящую из па-ма к затвору. Перед опусканием пальцы
ры пластин с отверстиями 2 для соеди-4 выведены из отверстий 2 подвес.ки 1 нения с проушиной 3 затвора, размеща-- .. и положение Открыто. По дос тижении
емой внутри подвески 1. Приводной затвора проушина 3. размещается внутри
захватньй орган содержит -цилиндричес-20парной подвески 1, устанавливая отверкий паявц 4 с рабочим участком 5,стия 2 напротив отверстия в проушине
размещаемым в отверстиях подвески. В3 затвора.-Для сгдепления устройства
средней части пальца , 4 в.ыполнен коль-с затвором корпус 9с пальцем 4 перецёвой выступ 6 со скругленными краямимещают по -направлению к подвеске 1
7, а на свободном конце пальца зак- 25и располагают рабочий участок 5 пальреплен груз 8.. Палец 4 смонтированца 4 в отверстиях 2 с зазором и цод
консольно в полом корпусе 9, содержа-углом к оси отверстий. При этом палец
щем опорные седла 10 и 11 для опира-4 опирается на опорные седла 10 и 11,
ния пальца в. исходном нерабочем поло-располагающиеся ниже оси отверстий 2. жении. В седле 10 выполнена клиновая 30 Неточности установки устройства отноканавка 12, в которой размещен вые--сительно гидротехнического затвора,
туп 6, что фиксирует палец от продо-.загрязнения и обледенения кромок отльного смещения в его исходном поло- .верстий компенсируются за счет круго жении. Седла 10 и 11 и посадочные ого зазора. После сцепления устрой- диаметры пальца-выполнены так,, что 35 затвором производятся. его подъпри установке захватного органа в,по-.f перевозка.
ложение Сцеплено палец 4. размещает- При.этом в начале подъема сцепное
ся в отверстиях 2 парной подвески 1 устройство смещается вверх относитепод углом к их оси, а седла 10 и 11льно затвора, выбирая зазор между и груз 8 располагаются ниже упомяну- 40 пальцем и посадочной поверхностью
той оси..проушины. В- момент касания проушиной
Рабочий участок 5, пальца 4 распо-пальца он занимает исходное положелагается в отверстиях 2 подвески 4ние,. т.е. расположен под углом к оси
с круговым зазором, при этом зазорД отверстия, опирается на опорные сед- между пальцем 4 и обращенной к корпу- 45 Ю 1 между пальцем -и торцовой
су 9 торцовой кромкой 13 нихшей поса-кромкой 13 образуется зазор Л. При
дочной поверхности лодвески 1 должендальнейшем движении подвески 1 и
быть меньше величины, допускающей по--пальца 4 вверх проушина затвора опиворот пальца 4 относительно канавки рается сверху на палец 4 и разворачи- 12 до горизонтального положения, что 50 вает его относительно седла 10 с каобеспечивает.самоустановку пальца внавкой 12, выбирая зазор d величина
отверстиях подвески под нагрузкой откоторого должна обеспечить размещение
веса затвора. На внутренней стенкепальца после выборки упомянутого закорпуса,9 над осью пальца по обе сто-зора под углом к оси отверстий 2 с РОНЫ диска с зазорами закреплены щты- 55 одновременным размещением груза 8
ри 1.4 и 15, предотвращающие выпадениениже указанной оси. пальца 4 из корпуса 9 от случайных После выборки зазора и проушина
сил при его перемещении. Подвеска 1разворачивает палец относительно крои корпус 9 связаны с подъемным меха-мки 13 до опирания пальца на нижние
посадочные поверхности отверстий 2 парной подвески 1, при этом между диском 6 и канавкой 12 седла 10 образуется зазор А (фиг.4),
Таким образом происходит самоустановка пальца в вертикальной плоскости. Если зазор л больше величины, до пускающей поворот пальца до горизонтального положения, то палец 4 под действием проушины 3 развернется вокруг канавки 12 до опирания на нижнюю посадочнз/то поверхность левой проушин подвески 1, а между кромкой 13 и пальцем 4 останется некоторьм зазор. В данном случае палец опирается на часть парной подвески 1 и корпус 9 (через опору 10), что недопустимо, так как требует выполнения корпуса 9 с расчетом на нагрузку от веса затвора. В предложенном захватном органе корпус выполнен из расчета нагрузки от веса пальца 4.
Самоустановка пальца в горизонтальной плоскости обеспечивается за счет цилиндричности его посадочных поверхностей. После окончания маневрирования затвором- и снятия нагрузки палец возвращается в исходное положение под действием груза 8, ограничительных штырей 14 и 15, направляющих поверхностей седел 10 и 11 и канавки
--346562.-
12, после чего вьгеодится из подвески 1 гидроцилиндром 17.
Изобретение позволяет повысить надежность работы сцепного устройства за счет обеспечения неизменности исходного положения пальца в корпусе и повысить его долговечность за счет исключения из его конструкции упругих, меняющих при изменении эксплуа тационнык условий свои физические характеристики элементов. Формула изобретения Захватный орган грузозахватного
15 устройства преимущественно для затворов гидротехнических сооружений, содержащий корпус с размещенным в нем консольно и с возможностью самоустановки пальцем для взаимодействия с
2Q проушинами груза, отличающийся тем, что, с целью повьш1е- ния надежности работы, он дополнительно снабжен закрепленными на кор- пусе ограничительными штьфями и дву25 мя седлами для пальца, одно из которых выполнено с клиновой канавкой, при этом в -средней части пальца выполнен кольцевой выступ со скругленными краями для взаимодействия с кли-.
30 новой канавкой и ограничительными т штырями, а на нерабочем конце пальца закреплен противовес.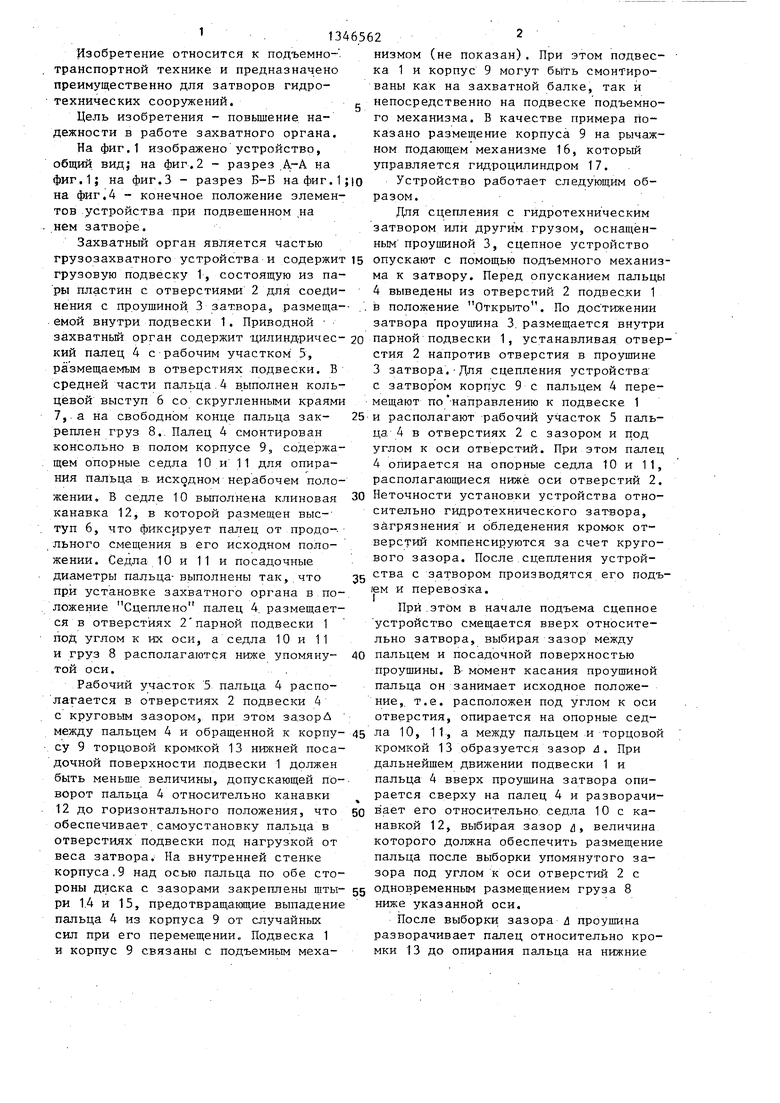
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная балка для маневрирования глубинным гидротехническим затвором | 1983 |
|
SU1147821A1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Рым-болт | 1982 |
|
SU1062170A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| Захватная крановая балка для подъема и транспортировки тяжелых длинномерных грузов, преимущественно затворов гидротехнических сооружений | 1957 |
|
SU110913A1 |
| Захватное устройство для грузов, снабженных штырем с фигурной головкой | 1973 |
|
SU542709A1 |
| Вилочный захват для штучных грузов | 1987 |
|
SU1418259A1 |
| ОБРАТНЫЙ ЗАТВОР | 2009 |
|
RU2416050C2 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 1991 |
|
RU2034998C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к грузозахватным устройствам преимущественно для затворов гидротехнических сооружений. Захватный орган грузозахватного устройства содержит палец 4, установленный в корпусе 9 в седлах 10 и 11. В седло 10 палец 4 упирается кольцевым выступом 6 со скругленнымикраями. Корпус 9 подвешен к захватному устройству посредством рычажного механизма 16 с приводом 17, а палец взаимодействует с подвеской 1 и проушиной 3 груза. При захвате груза и его подъеме обеспечивается самоустановка пальца 4 относительно подвески и проушин, что исключает концентрацию нагрузок на элементы устройства и повьш1ает таким образом надежность его работы. 4 ил; « О) оо 4 С5 сд 05 ю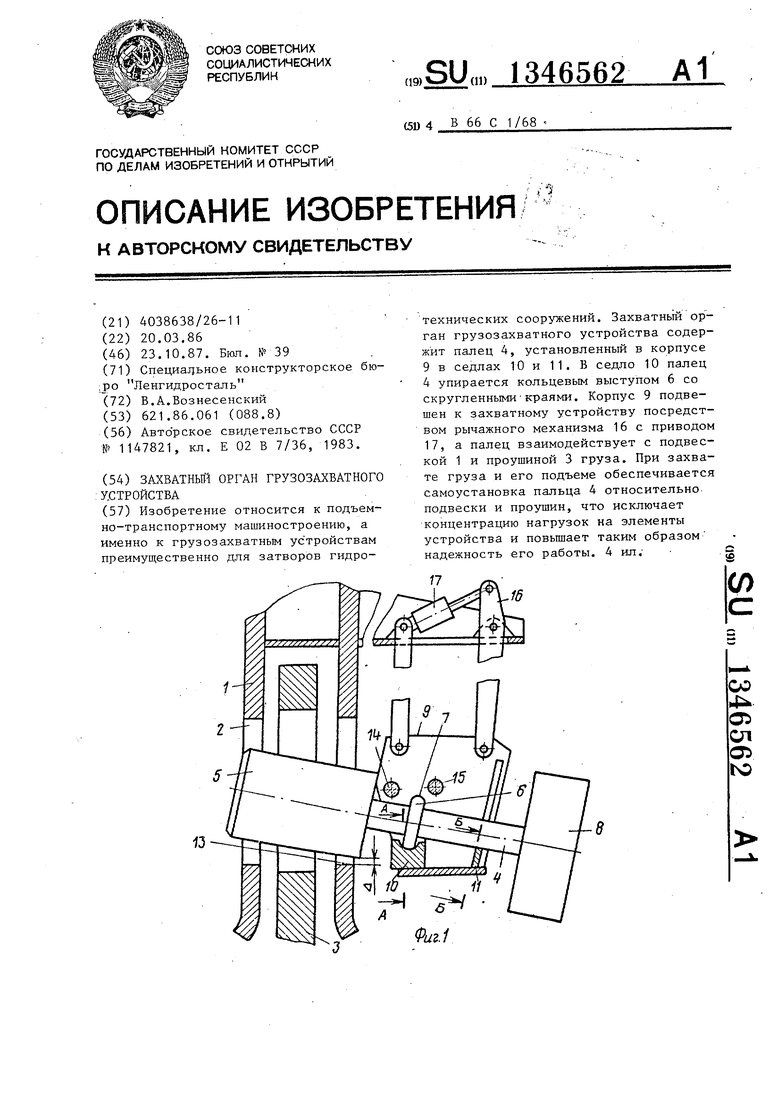
Фа-г,г
б-В
ФигМ
Редактор Н.Гунько
Составитель Ю.Козлов Техред М.Ходанич
Заказ.5086/21 Тираж 720 Подписное ВНИИПИ Государственного комитета. СССР
по делам изобретений и открытий t13035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор С,Черни
| Захватная балка для маневрирования глубинным гидротехническим затвором | 1983 |
|
SU1147821A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
