изобретение относится к гидротехнике и может быть использовано в составе механического оборудования гидросооружений для маневрирования затворами.
Известна захватная балка, включающая крюки, механизмы сцепления и расцепления i .
Данная балка вследствие сложности механизмов сцепления и расцепления работает недостаточно надежно, особенно при низких температурах.
Известна также захватная балка для маневрирования глубинным гидротехническим затвором, включающая раму, имеющую пазовые направляющие, проушины для соединения с подъемным механизмом, парные грузовые подвески с отверстиями дли соединения с затвором и пальцы, соединенные с приводом и входящие в отверстия подвесок 2 .
Недостатком известной захватной балки является низкая надежность работы вследствие возможности заклинивания пальцев в подвесках, несинхронной работы пальцев, а также изза наличия сложной пневмоаппаратуры
Цель изобретения - повьшение надежности работы путем уменьшения вероятности заклинивания пальцев в подвесках.
Поставленная цель достигается тем, что в захватной балке для маневрирования глубинным гидротехническим затвором, включающей раму,. имеющую пазовые направляющие, проушины для соединения с подъемным механизмом, парные грузовые подвески с оТ верстиями для соединения с затвором и пальцы, соединенные с приводом и входящие в отверстия подвесок, пальцы соединены с приводом посредством шарнирного параллелограммного механизма, вертикальные рычаги кото-рого на концах имеют упругие подушки, в которых закреплены пальцы, а диаметр пальца меньше диаметра отверстия в подвеске.
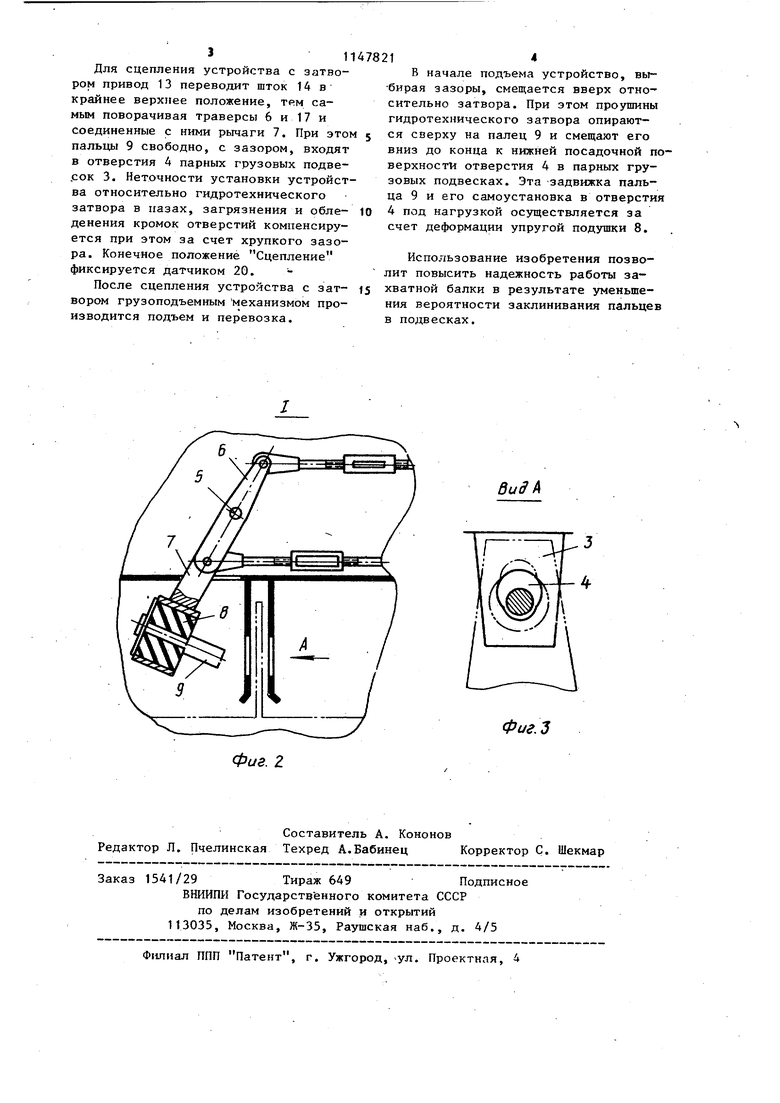
На фиг. 1 изображена захватная балка, вцц спереди; на фиг. 2 узел I на фиг. 1; на фиг. 3 - вид А на фиг. 2.
Устройство состоит из рамы 1 снаправляющими 2. На нижней части рамы 1 размещены парные грузовые подвески 3, в которых имеются отверстия А. На раме 1 в зоне над парными
212
грузовыми подвесками 3 установлены оси 5, на каждой из которьрс установлена траверса 6. С траверсой 6 жестко соединен рычаг 7, на нижнем конце которого в упругой подушке 8 установлен палец 9. Длина рычага 7 такова, что при положении Сцеплено палец 9 размещается в отверстии 4 со значительным круговым зазором (не менее 5 мм).
Концы траверс 6, расположенные по обеим сторонам рамы 1, соединены друг с другом параллельными тягами 10 и 11. В тяги встроены регулировочные стяжки 12. Привод 13 установлен в центральной части рамы 1. Шток 14 привода 13 серьгой 15 соединен с рычагом 16, жестко соединенным с вспомогательной траверсой 17,
которая установлена на оси 18, параллельной осям 5, концы траверсы 17 соответственно соединены с тягами 10 и 11,
На раме 1 установлены датчики 19
посадки, а в приводе 13 - датчик 20 положения пальцев.
Питание и управление приводом 13 производится по кабелю 21 с обслуживающего механизма, к которому устройство присоединяется, например
проушинами 22, расположенными на раме 1 .
Устройство работает следующим образом.
Присоединенное к подвескам обслуживающего механизма проушинами 22 и соединенное с механизмом кабелем 21 устройство является навесным оборудованием грузоподъемного
механизма. Для сцепления с гидротехническим затвором устройство опускается по пазам гидротехнического затвора и, направляясь пазовыми направляющими 2. достигает затвора. Перед
опусканием пальцы 9 приводом 13 выведены из отверстий 4 в контролируемое датчиком 20 положение Открыто, при зтом шток 14 выведен в крайнее нижнее положение, а траверсы 6 и 17
повернуты против часовой стрелки в крайнее положение.
По достижении затвора датчики 19 выдают сигнал о посадке устройства на затвор. При этом отверстия 4
в парных грузовых подвесках 3 устанавливаются напротив отверстий в проушинах, имеющихся на гидротехническом затворе. 51 Для сцепления устройства с затвором привод 13 переводит шток 14 в крайнее верхнее положение, тем самым поворачивая траверсы 6 и 17 и соединенные с ними рычаги 7. При это пальцы 9 свободно, с зазором, входят в отверстия 4 парных грузовых подвеjcoK 3. Неточности установки устройст ва относительно гидротехнического затвора в пазах, загрязнения и обледенения кромок отверстий компенсируется при этом за счет хрупкого зазора. Конечное положение Сцепление фиксируется датчиком 20. После сцепления устройства с затвором грузоподъемным механизмом производится подъем и перевозка. 1 В начале подъема устройство, выбирая зазоры, смещается вверх относительно затвора. При этом проушины гидротехнического затвора опираются сверху на палец 9 и смещают его вниз до конца к нижней посадочной поверхности отверстия 4 в парных грузовых подвесках. Эта задвижка пальца 9 и его самоустановка в отверстия 4 под нагрузкой осуществляется за счет деформации упругой подушки 8. Использование изобретения позволит повысить надежность работы захватной балки в результате уменьшения вероятности заклинивания пальцев в подвесках.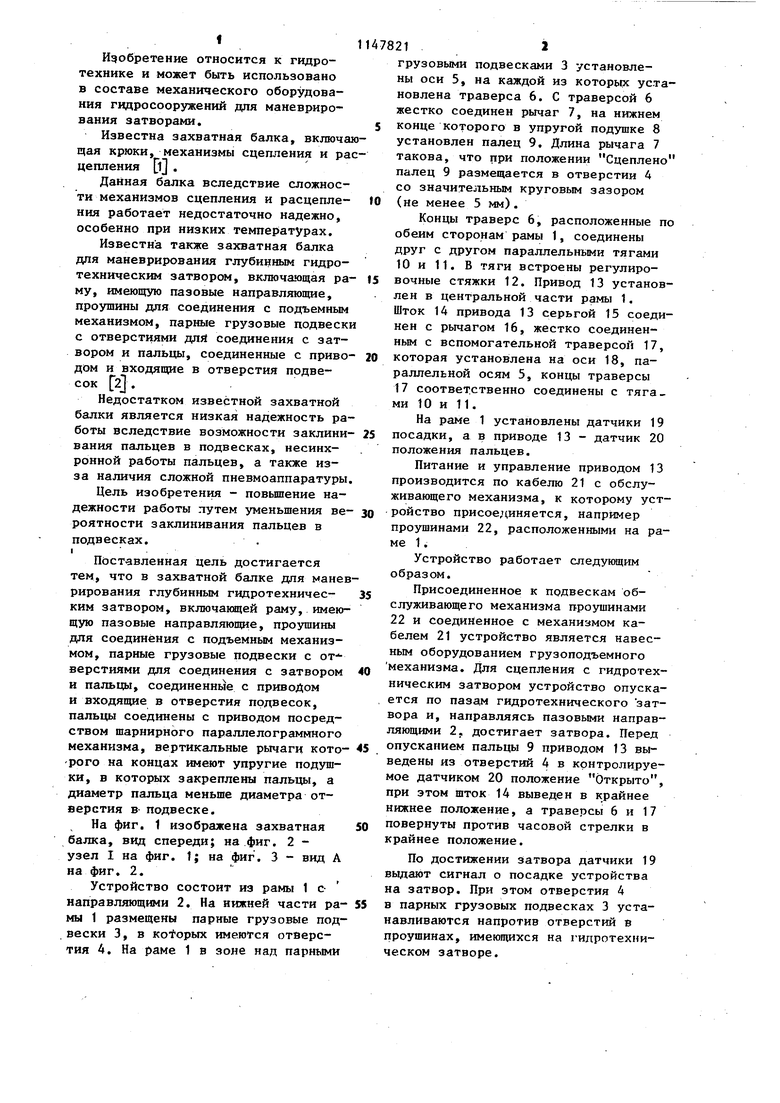
ЗАХВАТНАЯ БАЛКА ДЛЯМАНЕВРИРОВАНИЯ ГЛУБИННЫМ ГИДРОТЕХНИЧЕСКИМ ЗАТВОРОМ, включающая раму, имеющую пазовые направляющие, проушины для соединения с падъемным механизмом, парные грузовые подвески с отверстиями для соединения с затвором и палыцы, соединенные с приводом и входящие в отверстия подвесок, отличающаяся тем, что, с целью повышения надежности работы путем уменьшения вероятности заклинивания пальцев в подвесках, пальцы соединены с приводом посредством шарнирного параллелограммного механизма, вертикальные рычаги которого на концах имеют упругие подушки, в которых закреплены пальцы, а диаметр пальца меньше диаметра отверстия в подвеске. (Л
Вид ((
фиг J
| ,1 | |||
| Автоматическая захватная балка для затворов гидротехнических сооружений | 1959 |
|
SU128368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захватная балка для подъема и опускания затворов гидротехнических сооружений | 1956 |
|
SU114889A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
