/
00 ГС
ел
со
Изобретение относится к грузозахватным устройствам и может быть нс пользовано,, в частности, для подъема и монтажа железобетонных лестничных маршей зданий различного назначения.
Целью изобретения является повышение надежности, захвата.
На фиг,1 изображено устройство, общий вид в разрезе,; на фиг. 2 - узел I на фиг,1,
. Вилочный захват для штучных грузов содержит корпус 1, размещенный в нем подпружиненный рычажный элег мент с прижимным устройство,м и проу- ;шины 2 для подвески захвата к грузоподъемному механизму. -Подпружинен- :ный рычажный элемент представляет
собой шток 3, установленный в верх- ней горизонтальной части 4 корпуса посредством косынок 5 в. направляющих втулках 6 с возможностью продольного перемещения. Прижимное устройство включает в себя по крайней мере одну рамку 7, выполненную в виде равнобедренной трапеции, основания которой расположены вертикально и жестко соединены со штоком 3 по его продольной оси, В верхней горизонтальной части 4 корпуса 1 установлена по крайней мере одна пара пальцев 8 и 9 расположенных на одной вертикали с разных сторон штока 3 с возможностью возвратно-поступательного перемещения. Концы пальцев, обращенные к штоку 3, выполнены со сквозными наклонными отверстиями 10 и 11 для размещения в них боковых -сторон трапециевидной рамки 7.
Свободный- конец верхнего пальца 8 соединен с проушиной 2, свободный ко не.ц нижнего пальца 9 представляет собой прижимной упор 12. В вертикальной части 13 корпуса 1 на оси 14 установлен двуплечий рычаг 15, одно плечо 16 которого соединено с подпружиненным концом 17 штока 3, а второе плечо 18 выполнено Г-образным. .Для взаимодействия с грузом в вертикальной части 13 корпуса 1 с возмож- горизонтального перемещения установлен нажимной элемент 19, соединенный с Г-образньм плечом 18 двуплечего рычага 15.
Устройство работает следующим образом.
В исходном состоянии нажимной элемент 19 выдвинут и занимает крайнее правое положение. Проушины 2 и прижимные упоры 12 расположены внутри корпуса.
Цпя подъема, например, лестнич- ного марша с одной из его боковых сторон устанавливают по вилочному захвату. Если груз заведен на полную глубину зева захвата, нажимной элемент 19 перемеп1ается влево, поворачивает двуплечий рычаг 15 относительно его оси 14, что, в свою очередь, заставляет шток 3 с рамками 7 перемещаться вправо. Пальцы 8 и 9 движутся вертикально, палец В-вверх,
вьщвигая проушину 2, палец 9 - вниз,, выдвигая прижимной упор 12.
За выдвинувшиеся из корпуса 1 проушины 2 заводятся грузозахватные органы крана и производится подъем
лестничного марша. При этом подъемная сила, действующая на проушины 2, передается пальцами 8 на рамку 7, которые -под ее воздействием смещаются вместе со штоком 3 вправо и перемещают пальцы 9, прижимные упоры 12 которых зажимают груз с усилием-, равным подъемной силе.
Формула изобретени я
Вилочный захват для штучных грузов, содержащий С-образный корпус, размещенный в его верхней части подпружиненный рычажный элемент с прижимным приспособлением и связанные
с ним проушины для подвески захвата к грузоподъемному механизму, отличающийся тем, что, с целью повышения надежности, верхняя горизонтальная полка С-образного
корпуса вьшолнена полой с соосными вертикальными отверстиями в верхней и сторонах, вертикальная его полка выполнена -с горизонтальньш . . отверстием на внутренней .,
подпружиненный рычажньм элемент представляет собой щток, установленный внутри горизонтальной полки корпуса с возможностью продольного перемещения, прижимное приспосс бление включает в себя по крайней мере одну рамку в виде равнобедренной трапеции, основания которой расположены вертикально и жестко соединены со штоком, а захват снабжен расположенными внут- три верхней горизонтальной полки С- образного корпуса направляющими для штока с по крайней мере одной парой пальцев, установленных в соосных отверстиях верхней полки С-образного
корпуса, концы которых, обращенные к штоку, выполнены со сквозными наклонными к штоку отверстиями для размещения в них боковых сторон тра пецеидальной рамки, при этом на сво бодном конце верхнего пальца жестко закреплена проушина, а свободный конец нижнего пальца выполнен с ра- ,бочей поверхностью для прижима груД182594
за, шарнирно закрепленным в вертикальной полке корпуса и расположенным вдоль нее двуплечим рычагом , одно плечо которого соединено с подпружиненным концом штока, а другое изогнуто для взаимодействия с грузом и расположено в горизонтальном отверстии вертикальной полки С-образного ,Q корпуса.
5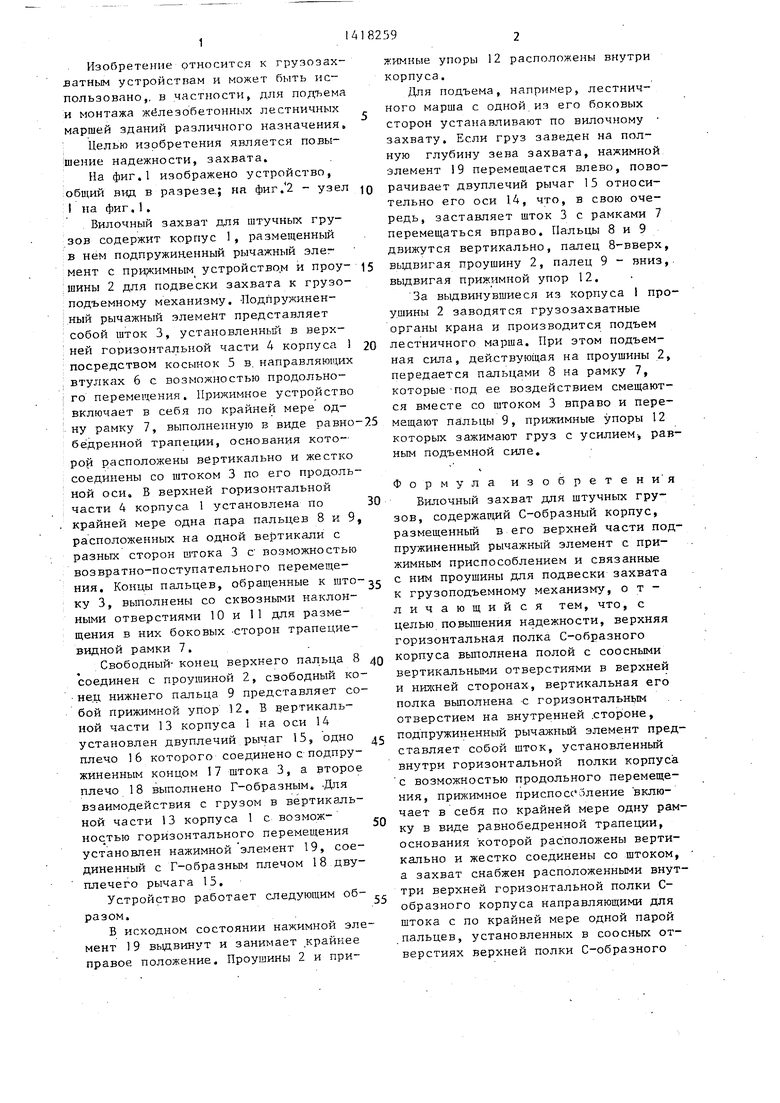
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1988 |
|
SU1696371A1 |
| Грузозахватное устройство | 1988 |
|
SU1504197A1 |
| Телескопический подъемник | 1990 |
|
SU1754641A1 |
| Контейнер | 1990 |
|
SU1761631A1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1991 |
|
SU1830014A3 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| Погрузчик | 1980 |
|
SU931702A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1966 |
|
SU222628A1 |
| Вилочный захват подъемно-транспортной машины | 1984 |
|
SU1266836A1 |
Изобретение относится к грузозахватным устройствам и может быть использовано, в частности,,для лодъе- ма железобетонных лестничных мардией зданий различног о назначения. Целью изобретения является повышение надежности. Дпя подъема груза, например лестничного марша, с одной стороны устанавливают вилочный захват. Если груз заведен на полную глубину зева захвата, то нажимной элемент 19 перемещается внутрь корпуса 1, пово- рдчивает двуплечий рычаг 15 относительно его оси 14, при этом шток 3 с трапециевидньпчи рамками 7 перемещается вправо. Палец 8 движется . вверх, выдвигая из корпуса I проушину 2, палец 9 перемещается вниз, выдвигая прижимной упор 12. За выдвинувшиеся из. корпуса 1 проушины 2 заводят грузозахватные органы крана, .груз поднимают. Подъемная сила, действующая из проушины 2, передается пальцами В на рамки 7, которые под ее воздействием смещаются вместе со штоком 3 вправо и перемещают пальцы 9, прижимные упоры 12 которых зажимают груз с усилием, равным подъемной силе. 2 ил. . S (Л
Фиг. 2
| Захват для пакетов | 1972 |
|
SU629157A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
