Изобретение относится к гидроавтоматике и может быть использовано в конструкциях промышленных роботов и цикловых автоматов.
Цель изобретения - повышение быстродействия и КПД путем формирования и поддержания резонансного режима при переменных нагрузках, а также обеспечение резонансного режима при нескольких степенях подвижности манипулятора.
На чертеже изображена схема гидравлического привода манипулятора.
Привод содержит регулируемые насосы-дозаторы 1 и 2 с приводным двигателем 3, программные задатчики подачи насосов-дозаторов 1 и 2 в виде кулачков 4 и 5, синхронизированных с приводными валами 6 и 7 насосов-дозаторов 1 и 2, гидродвигатели, число которых равно числу насосов-дозаторов и степеней подвижности манипулятора, из которых на чертеже изображен один гидродвигатель 8, полости 9 и 10 которого соединены с патруками 11 и 12 насоса-дозатора 1. К полости 10 подключен гидроаккумулятор 13, связанный с системой стабилизации давления, вьшолненной в виде регулируемого насоса 14. Гидроаккумулятор 15 подключен к полости гидродвигателя (не изображен), соединенного с патрубками 16 и 17 насоса- дозатора 2.
Приводные валы 6 и 7 соединены между собой, а также через упругий элемент 18 с двигателем 3. Маховик 19 кинематически жестко связан с валами 6 и 7.
Гидродвйгатель В выполнен с каналами 20 и 21 и имеет поршень 22 с штоком 23. Кулачки 4 и 5 синхронизи- .розаны с валами 6 и 7 зубчатыми передачами 24 и 25.
Гидравлический привод манипулятора работает следующим образом.
При вращении вала 6 от двигателя
3насос-дозатор 1 подает в гидродвн- гатель 8 тарированный поток жидкости, величина расхода которого изменяется кулачком 4 по заданной програ Me, разворачиваюш;ейся по углу поворота вала 6. При этом шток 23 совершает периодическое возвратно-поступательное движение с частотой, определяемой скоростью вращения кулачка
4и законами прямого и обратного движения, определяемого формой кулачка 4.
0
5
0
Установкой жесткости упругого элемента 18, объемной жесткости гидроаккумулятора 13 и момента инерции маховика 19 собственная частота системы маховик - насос - гидродвигатель - нагрузка задается равной частоте повторения рабочих циклов манипулятора, что обеспечивает работу привода в резонансном режиме, при котором происходит непрерывное преобразование кинетической энергии подвижных элементов манипулятора в потенциальную энергию при приближении траектории его движения к мертвым точкам. При этом разгон привода и манипулятора в целом при реверсировании движения обеспечивается как за счет действующего момента двигателя 3, так и за счет накопленной в элементе 18 и гидроаккумуляторе 13 потенциальной энергии, В результате существенно снижаются потери энергии, связанные с реверсированием гидро5 двигателя 8, повышается допустимая скорость его движения по заданной траектории, т.е. частота повторения рабочих циклов, а следовательно, производительность машины-автомата.
0 Подключение второго насоса-дозатора 2 для обеспечения движения другим степеням подвижности не меняет основную частоту движения по условиям работы цикловых машин-автоматов, но требует корректировки параметров
маховика 19 и упругого элемента 18 для настройки режима работы привода на резонансный режим, обеспечивающий получение максимально возможного КПД работы привода.
При работе привода насосом 14 обеспечивается минимальный уровень давления для обеспечения бестсавита- ционной работы и настройки гидроаккумулятора 13. Каналы 20 и 21 обеспечивают гашение ошибок позиционирования при подходе поршня 22 к крайним положениям. Поскольку при изменении нагрузки на штоке 23 изменяется, частота двигателя 3 (в соответствии с его характеристикой), изменение скорости кулачков 4 и 5, вызываемое изменением частоты двигателя 3, направлено на соответствующую корректировку подачи насосов-дозаторов 1 и 55 2 для поддержания резонансного режима работы привода.
Наличие упругого элемента 18 и маховика 19 позволяет задавать собственную частоту привода для обес0
45.
50
3
печения резонанса, при этом колебания угловой скорости 19 не приводят к резкому из крутящего момента двигателя рый в результате работает в наибольшего КПД,
формула изобретения
1. Гидравлический привод манипулятора, содержапщй по меньшей мере один регулируемый насос-дозатор с приводным двигателем, программный задатчик подачи насоса-дозатора, синхронизирйванный с приводным валом последнего, по меньшей мере один гидродвигатель, соединенный одной из полостей с одним из патрубков на- сосй-дозатора, и гидроаккумулятор, подключенный к одной из полостей гидродвигателя, отличающий- с я тем, что, с целью повьшения быстродействия и КПД путем формирования .и поддержания резонансного режима
Редактор А.Ворович Заказ 5108/35
Составитель С.Рождественский ТехредА.Кравчук
Корректор
Тираж 639подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород,/ул. Проектная, 4
5
0
при переменных нагрузках, привод снабжен маховиком, упругим элементом и системой стабилизации давления, а насос-дозатор вьшолнен реверсивным и обратимым и соединен вторым патрубком с другой полостью гидродвигателя, при этом аккумулятор связан с системой стабилизации давления, а приводной вал насоса-дозатора соединен с приводным двигателем через упру- гий элемент и жестко ки 1ематически связан с маховиком.
2-, Привод по п. 1, отличающийся тем, что, с целью обеспечения резонансного режима при нескольких степенях подвижности манипулятора, он выполнен с числом гид- родвигателей, аккумуляторов и насосов-дозаторов, равным числу степеней подвижности, причем насосы-дозаторы выполнены синхронизированными путем соединения их приводных валов между собой и с маховиками.
Корректор И.Муска
| название | год | авторы | номер документа |
|---|---|---|---|
| КАМЕРНЫЙ ДВИГАТЕЛЬ МАГ | 2008 |
|
RU2396445C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ИЗМЕНЯЕМОЙ ТАКТНОСТИ | 1994 |
|
RU2090767C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ГИДРОПРИВОДОМ | 1993 |
|
RU2078962C1 |
| СИЛОВАЯ УСТАНОВКА | 2014 |
|
RU2578760C2 |
| Устройство для очистки днища судна | 1973 |
|
SU482353A1 |
| УНИВЕРСАЛЬНАЯ ГИДР&СИСТЕМ.4 СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1971 |
|
SU307755A1 |
| Способ автоматического управления реверсивным движением гидродвигателя | 1985 |
|
SU1275124A1 |
| Система аварийного запуска двигателя внутреннего сгорания | 2020 |
|
RU2725911C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ЭНЕРГОСБЕРЕГАЮЩЕЕ | 1999 |
|
RU2195402C2 |
| ШЕСТЕРЕННЫЙ НАСОС | 1992 |
|
RU2092711C1 |
Изобретение м.б. использовано в промьшшенньк роботах и цикловых автоматах. Цель изобретения - повышение быстродействия и КПД путем формирования и поддержания резонансного режима при переменных нагрузках. Насос-дозатор (Н-Д) 1 выполнен ре- реверсивным и обратимым,соединен с полостями 9, 10 гидродвигателя (ГД) 8, а его приводной вал 6 соединен с приводным двигателем 3 через упругий элемент 18 и жестко связан с маховиком 19. К полости 10 ГД 8 подключен гидроаккумулятор (ГА) 13, связанный с системой стабилизации давления, выполненной в виде регулируемого насоса 14. Разгон привода при реверсировании обеспечивается как за счет момента двигателя 3, так и за счет накопленной в элементе 18 и ГА 13 потенциальной энергии. Для обеспечения резонансного режима при нескольких степенях подвижности манипулятора он м.б. выполнен с числом, ГД, ГА и Н-Д, равным числу степеней подвижности, при этом Н-Д выполнен синхронизированными путем соединения их приводных валов между собой и с маховиками. Собственная частота системы маховик - насос - ГД - нагрузка задается равной частоте повторения рабочих циклов манипулятора установкой жесткости элемента 18, объемной жесткости ГА 13 и момента инерции маховика 19.1 з.п. ф-лы, 1 ил. Ш (Л С 19 Ч 18 и 8 -/3 10 со 4:: ЭО СП 15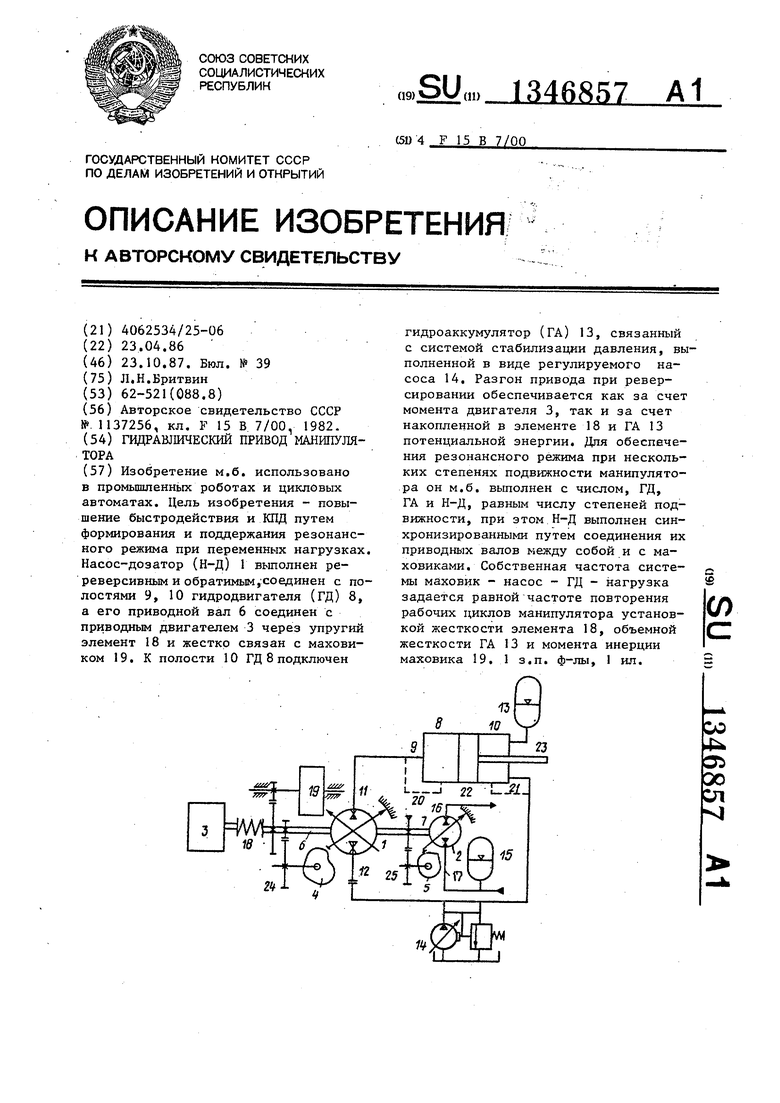
| Авторское свидетельство СССР № | |||
| Гидропривод манипулятора | 1982 |
|
SU1137256A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
