Известные способы автоматического ограничения ускорения привода по системе генератор-двигатель осуществляются при помощи гибкой отрицательной обратной связи по электродвижущей силе генератора.
Описываемый способ позволяет уменьшить габариты и повысить эффективность ограничения ускорения устройства. Это достигается тем, что сигнал указанной отрицательной обратной связи по э.д.с. генератора суммируют с сигналом гибкой положительной обратной связи по току якоря. Полученный сигнал подают на обмотку возбуждения генератора.
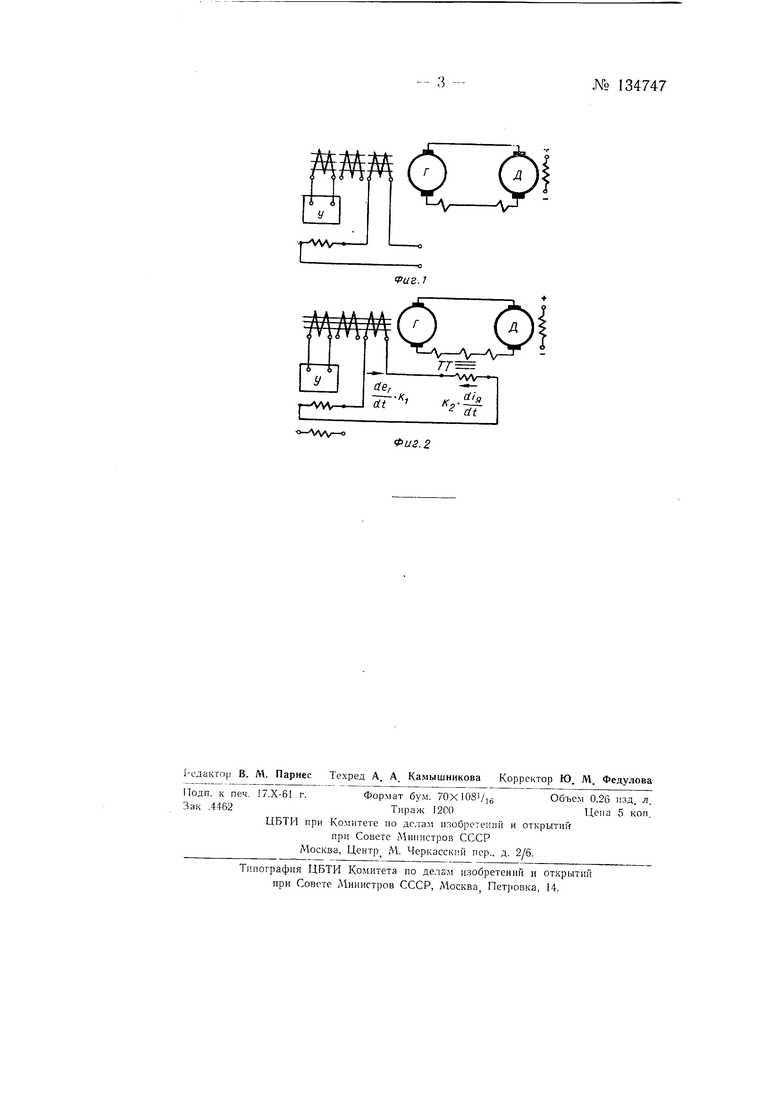
На фиг. изображена принципиальная схема осуществления описываемого способа; на фиг. 2--схема с гибкой положительной обратной связью по току.
Для получения сигнала, пропорционального производной э.д.с. генератора (e.), используется дополнительная обмотка, размещаемая на главных полюсах генератора (фиг. Г).
Электродвижущая сила, наводимая в этой обмотке
6.d - OO--J -- K -.
где Ф,--магнитный поток генератора; - число витков в дополнительной обмотке.
Во вторичной обмотке трансформатора тока ГГ (фиг. 2) наводится э.д.с., пропорциональная току якоря
Фгг,. и (/„г..)
в.П-:«;...,
где Ш2ГТ - ЧИСЛО витков во вторичной обмотке трансформатора тока /Т; г J, сопротивление якоря.
d0,rfe,
№ 1347472 Сигнал, получаемый в результате суммирования, пропорционален
производной э.д.с. двигателя, если к -- . Следовательно, при
ПОСТОЯННОМ потоке двигателя он пропорционален ускорению:
л:., d(e, ij )deg.dn
/9f -,.- . t,L/a -,.
ve3 00 ::.jy 3 У7 -
1де n - скорость вращения (число сборотов).
Электродвижундая сила е„й подается на вход системы регулирования либо последовательно с задающим сигналом, как показано на фиг. 1, либо на отдельную стабилизирующую обмотку усилителя У. Вследствие значительной величины магнитного потока генератора Ф необходимая э.д.с. в„,) может быть получена при малых габаритах обмотки Wo(,. Для общности генератор на фиг. 1 показан многообмоточным.
При применении генераторов единой серии можно заменять компаундирующую обмотку, которая в системах генератор-двигатель (Г-Д), как правило, не используется дополнительной обмоткой с соответствующими параметрами.
Применение описываемого способа может явиться эффективным средством ограничения ускорений в системе генератор-двигатель, например в электроприводе скоростных лифтов. Кроме того, этот способ обеспечивает более мощный сигнал обратной связи, что позволяет применять его в система.к с невысоким общим коэффициентом усиления системы, в частности, в схемах с снловыми магнитными усилителями, используемыми непосредственно для управления полем генератора, а также для стабилизации систем асинхронного привода, управляемых посредством дросселей насыщения при наличии промежуточного усилителя. При этом дополнительная обмотка должна размещаться ана.яогично обмоткам силовых дросселей насыпгения.
Предмет изобретения
Способ автоматического ограничения ускорения привода по системе генератор-двигатель, осуществляемый при помощи гибкой отрицательной обратной связи по э.д.с. генератора, отличающийся тем. что, с целью уменьщения габарита устройства и повыщения эффективности ограничения ускорения, сигнал с указанной обратной связи по э.д.с. генератора суммируют с сигналом гибкой положительной обратной связи по току якоря и после суммирования подают на обмотку возбуждения генератора.
di dt /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом экскаватора | 1960 |
|
SU139703A1 |
| Устройство для управления электроприводом по системе Г-Д | 1960 |
|
SU135131A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373825A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1968 |
|
SU220325A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Бесконтактное устройство для автоматического управления электроприводом постоянного тока | 1960 |
|
SU134755A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАШИНЫ ПОСТОЯННОГО ТОКА | 2005 |
|
RU2281525C1 |
| Устройство для управления электроприводом постоянного тока механизмов экскаватора | 1974 |
|
SU663794A2 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2329514C1 |
О-ЛЛДго
Фиг. 2
