Известны устройства для управления приводом экскаватора, выполненного по системе генератор-двигатель, имеющие магнитный усилитель с двумя обмотками управления, включенными по дифференциальной схеме, задающий потенциометр и командоконтроллер, включающий в своем крайнем лоложении указанные обмотки параллельно задающему потенциометру. Однако такие устройства не обеспечивают необходимого управления приводом.
В описываемом устройстве для улучщения статических и динамических характеристик привода командоконтроллер снабжен контактами, с помощью которых в его нулевом положении обмотки управления магнитного усилителя соединяются последовательно, создавая сильное отрицательное смещение. При каждом промежуточном положении командоконтроллера обмотки переключаются на параллельное соединение с последовательным включением активного сопротивления в цепь одной из обмоток. Для компенсации изменения величины тока привода при изменении температуры двигателя питание задающего потенциометра производится от мостовой схемы, два плеча которой образованы двумя половинами обмотки возбуждения (или обмотками возбуждения при наличии двух двигателей), а два других плеча - активными сопротивлениями.
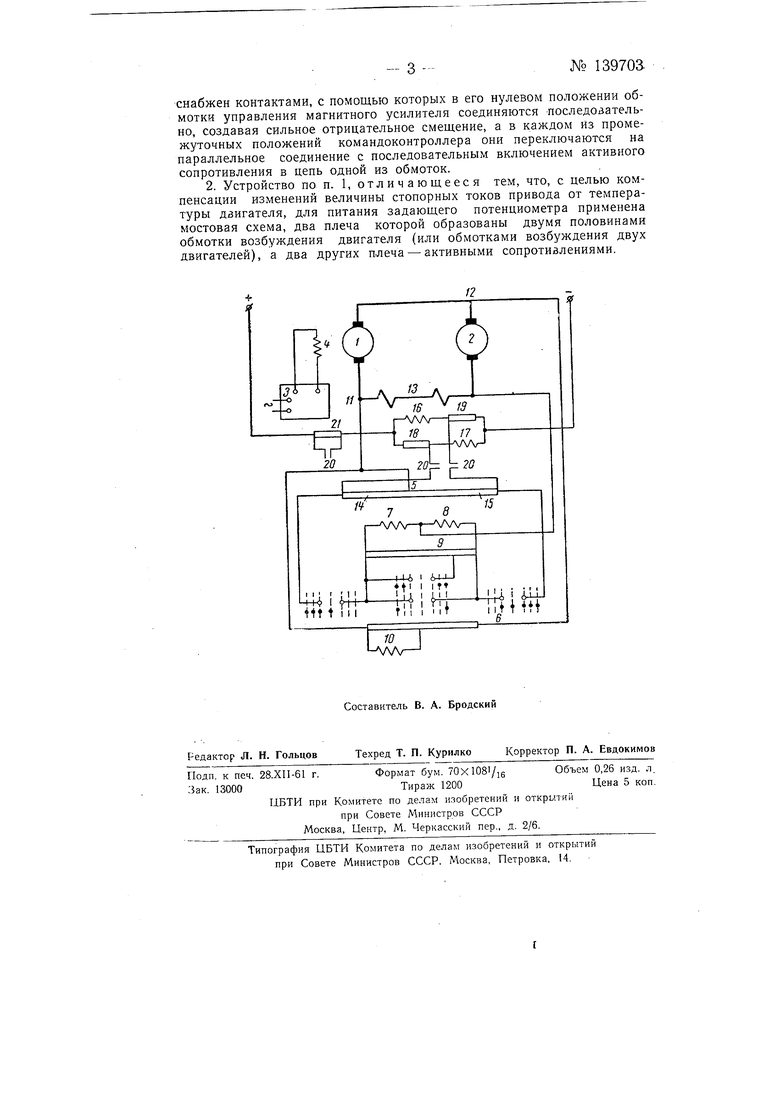
На чертеже изображена схема устройства.
Устройство для управления экскаваторным электроприводом, выполненным по схеме генератор 1, двигатель 2, состоит из дифференциального силового магнитного усилителя 3, питающего обмотку 4 возбуждения генератора /, задающего потенциометра 5 и командоконтроллера 6.
№ 139703- 2 - Обмотки 7 к 8 управления в крайнем положении командоконтроллера 6 подключаются параллельно задающему потенциометру 5, благодаря чему при насыщении усилителя 3 основная характеристика привода приобретает экскаваторную форму. В промежуточных положениях командоконтроллера 6 симметричность включения обмоток 7 и 8 изменяется за счет последовательного включения в цепь одной из них активиого сопротивления 9. При этом характеристики магнитного усилителя 3 сохраняют форму основной характеристики, но отличаются максимумом тока на выходе усилителя 3 з зоне насыщения. Ввиду нелинейности характеристик усилителя 3 промежуточные характеристики привода также имеют экскаваторную форму. Характеристика привода, соответствующая нулевому положению командоконтроллера 6, имеет весьма благоприятную форму для удержания ковща экскаватора и получается за счет сильного отрицательного смещения, создаваемого соединенными последовательно обмотками 7 и 8 управления магнитного усилителя 3. При этом за счет изменения величины тока сг ещения можно изменять данные этой характеристики. Указанное смещение может быть использовано также для быстрого гашения поля генератора /.
Обмотка 10 магнитного усилителя 3, подключенная в точках // и и /)2 на напряжение генератора Л осуществляет обратную связь по напряжению, положительную, если требуется высокое заполнение экскаваторной характеристики, либо отрицательную, если необходимо эффективное ограничение тока при резких остановках. Надежное токоограничение осуществляется непрерывной отрицательной связью по току якоря, воздействующей непосредственно на цепь обмоток 7 к 8 усилителя 3 путем электрического суммирования сигнала отрицательной связи по току, снимаемого с участка 13 цепи якоря, с задающим сигналом управления, €нимаемым с участка 14 или 15 потенциометра 5.
Автоматическая компенсация температурных изменений тока осуществляется при помощи мостовой схемы включения двух половин 16 и 17 обмотки возбуждения двигателя 2 и двух активных сопротивлений 18 и 19, имеющих небольшой температурный коэффициент. Поскольку питание задающего потенциометра 5 осуществляется с диагонали моста, то при увеличении сопротивления обмотки возбуждения двигателя 2 ввиду его нагрева происходит соответствующий рост напряжения на потенциометре 5. В динамике у некомпенсированных двигателях привода вследствие реакции якоря при резких изменениях нагрузки эта часть устройства дает также гибкую отрицательную связь по току, способствующую ограничению момента привода.
Контактор 20 управления служит для отключения потенциометра 5 и введения сопротивления 21 при наложении механического тормоза во время длительной стоянки экскаватора.
Описываемое устройство позволяет иметь простой и безналадочный экскаваторный электропривод, обладающий высокой устойчивостью без применения стабилизирующих средств.
Предмет изобретения
1. Устройство для управления приводом экскаватора по системе генератор-двигатель, содержащее магнитный усилигель с двумя обмотками управления, включенными это дифференциальной схеме, задающий потенциометр и командоконтроллер, в своем крайнем положении подключающий указанные обмотки параллельно задающему потенциометру, отличающееся тем, что, с целью улучшения статических и динамических характеристик привода, командоконтроллер
снабжен контактами, с помощью которых в его нулевом положении обмотки управления магнитного усилителя соединяются последозательно, создавая сильное отрицательное смещение, а в каждом из промежуточных положений командоконтроллера они переключаются на параллельное соединение с последовательным включением активного сопротивления в цепь одной из обмоток.
2. Устройство по п. 1, отличающееся тем, что, с целью компенсации изменений величины стопорных токов привода от температуры двигателя, для питания задающего потенциометра применена мостовая схема, два плеча которой образованы двумя половинами обмотки возбуждения двигателя (или обмотками возбуждения двух двигателей), а два других плеча - активными сопротивлениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для станков | 1951 |
|
SU98785A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373825A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЬГМ ЭЛЕКТРОПРИВОДОМ | 1966 |
|
SU182213A1 |
| Способ автоматического ограничении ускорения привода по системе генератор-двигатель | 1960 |
|
SU134747A1 |
| Электропривод постоянного тока | 1974 |
|
SU498701A1 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1980 |
|
SU1048066A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1967 |
|
SU205115A1 |
| Устройство для управления электроприводом | 1950 |
|
SU93135A1 |
| Бесконтактное устройство для автоматического управления электроприводом постоянного тока | 1960 |
|
SU134755A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |