-3
ся от одного привода. На невращающейся части 1 корпуса смонтированы передаточное звено, механизм его сцепления с полумуфтой 10 или 11 схвата или же с конической шестерней 16,осуществляющей смену рабочих положений захватного устройства, и механизм фиксации схватов в рабочих положениях От привода 24 вращение через вал 5 передается на втулку 6 и сцепленные конические шестерни 8 и 16 Осуществляется смена местами схватов 3 и 4. При движении захватного устройства вниз освобождаются толкатель 28 и зубчатая рейка 19,, фиксатор 26 входит
в гнездо 30, а полумуфта 9 сцепляется с полумуфтой 11. Включаясь, привод 24 передает вращение на сцепленные полумуфты 9 и 11 и спиральный диск 13, перемещающий рейки-кулачки 15. Происходит зажим или освобождение заготовки из схвата 4. При движении захватного устройства вверх рейки 19 и толкатель 28 упираются в корпус 23. При этом происходит расцепление полумуфт 9 и 11 и соответственно сцепление шестерен 8 и 16, а фиксатор 26 выходит из гнезда 30. Цикл работы захватного устройства повторяется. 1 3. п. ф-лы, 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Захватная балка для подъема и опускания затворов гидротехнических сооружений | 1960 |
|
SU140373A1 |
| Станок для точки кардной гарнитуры шляпок | 1954 |
|
SU100815A1 |
| Многошпиндельный токарный автомат | 1984 |
|
SU1219263A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| СИСТЕМА ЗАРЯЖАНИЯ АВТОМАТИЧЕСКОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2003 |
|
RU2231728C1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| Устройство для свинчивания деталей | 1981 |
|
SU973287A1 |

Изобретение относится к машиностроению и может быть использовано в промышленных роботах. Цель изобретения - уменьшение энергоемкости и повышение надежности устройства. Для этого в захватном устройстве, снабженном двумя самоцентрирующимися схватами 3 и 4, установленными во вращающейся части 2 корпуса, их попеременная работа и смена осуществляется от одного привода. На невращающейся части 1 корпуса смонтированы передаточное звено, механизм его сцепления с полумуфтой 10 или 11 схвата или же с конической шестерней 16, осуществляющей смену рабочих положений захватного устройства, и механизм фиксации схватов в рабочих положениях. От привода 24 вращение через вал 5 передается на втулку 6 и сцепленные конические шестерни 8 и 16. Осуществляется смена местами схватов 3 и 4. При движении захватного устройства вниз освобождаются толкатель 28 и зубчатая рейка 19, фиксатор 26 входит в гнездо 30, а полумуфта 9 сцепляется с полумуфтой 11. Включаясь, привод 24 передает вращение на сцепленные полумуфты 9 и 11 и спиральный диск 13, перемещающий рейки-кулачки 15. Происходит зажим или освобождение заготовки из схвата 4. При движении захватного устройства вверх рейки 19 и толкатель 28 упираются в корпус 23. При этом происходит расцепление полумуфт 9 и 11 и соответственно сцепление шестерен 8 и 16, а фиксатор 26 выходит из гнезда 30. Цикл работы захватного устройства повторяется. 1 з.п. ф-лы, 2 ил.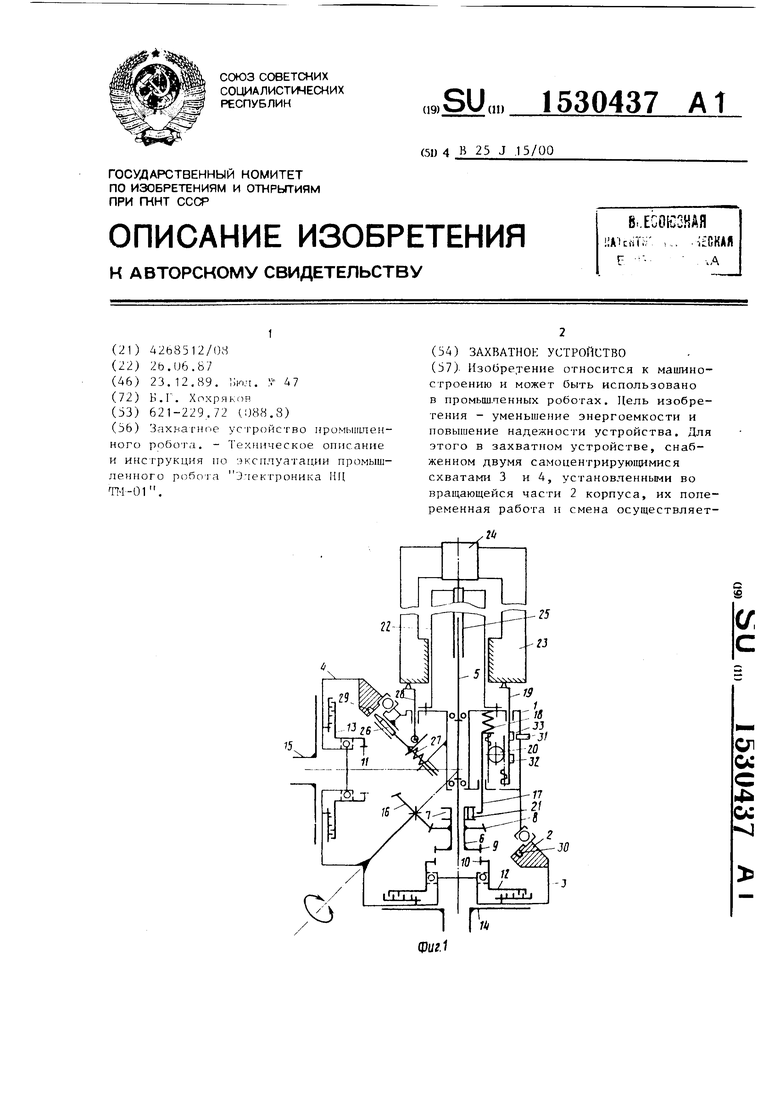
Изобретение относится к машиностроению и может быть использовано в промьшшенных роботах и манипуляторах
Цель изобретения - уменьшение энергоемкости и габаритов захватного устройства за счет обеспечения попер менной работы схватов и их смены местами от одного привода.
На фиг.1 изображена кинематическая схема захватного устройстваj на фиг.2 - пример конкретного применения устройства в промьшшенных роботах для загрузки-разгрузки станков сЧПУ.
Захватное устройство состоит из корпуса, имеющего невращающуюся часть 1 и вращающуюся часть 2, на которой жестко закреплены самоцентрирующиеся схваты 3 и 4, чьи оси пересекаются под углом 90 и точка их пересечения лежит на оси вращения вращающейся части 2 корпуса, делящей этот угол пополам. В невращающейся части 1 корпуса установлен, например на подшипниках качения, вал 5 привода, расположенный таким образом что при повороте вращающейся части 2 корпуса ось этого вала привода может поцеременно совпадать с осью каждого из схватов 3 и 4. На валу 5 привода подвижно вдоль его оси смонтировано передаточное звено, выполненное в виде втулки 6, имеющей кольцевой паз 7, причем втулка выполнена заодно с конической шестерней 8 и полумуфтой 9. Полумуфта 9 сцеплена с аналогичной ей полумуфтой 10, установленной на приводном элементе самоцентрирующегося схвата 3, соосного в данный момент с осью вала 5 привода. Схваты 3 и 4 могут бытв вьтолнены, например, в виде двух- или трехкулачкового патрона со спирально-реечным механизмом. Иолумуфты 10 и 11 выполнены на спиральных днсках 12 и 13, сцепленных с рейками-кулачками 14 и 15 соответственно.
В невращающейся части 1 корпуса установлен механизм сцепления передаточного звена с приводным элементом схвата (10 или 11) или же с конической шестерней 16, жестко закрепленной на оси вращения части 2 корпуса. Механизм сцепления состоит из зубчатой рейки 17, подпружиненной пружиной 18, и зубчатой рейки 19, которые связаны между собой с
помощью зубчатого колеса 20, смонтированного на оси. На рейке 17 выполнен выступ 21, которым она связана с втулкой 6 через кольцевой паз 7. Конец рейки 19 выступает за
пределы части 1 корпуса захватного устройства.
Захватное устройство закреплено на направляющей 22 механизма подъе- ма, которая может перемещаться относительно его корпуса 23 в вертикаль- ;« ом направлении. В корпусе 23 механизма подъема неподвижно установлен общий привод 24, который соединен своим полым валом 25,
через шпонку или шлицы, с валом ,5 привода, образуя телескопическое соединение, передающее крутящий мо- мент.
В /дополнение к этому с целью повышения надежности работы захватного устройства в невращающейся части 1 корпуса смонтирован механизм фиксации схватов в рабочем положении.
Механизм фиксации состоит из фиксатора 26, подпружиненного пружиной 27 и установленного с возможностью радиального перемещения относительно оси вращения вращающейся части 2 корпуса захватного устройства, и толкателя 29, установленного параллельно оси вала 3 гривода. Один конец толкателя выступает за пределы корпуса 1 и может взаимодействовать с корпусом 23, другой конец толкателя воздействует через ролик на фиксатор 26.
Фиксатор може 1 попеременно входить 20 Устройство останавливается, напр}1мер.
в гнезда 29 и 30. Эти гнезда 29 и 30 расположены во вращающейся части
2корпуса так, что при сопряжении фиксатора 26 с гнездом 29 ось схвата
3точно совпадает с осью вала 5 привода, при сопряжении фиксатора 26 с гнездом 30 ось схпата 4 точно совпадает с осью вала 5 привода.
Кроме этого, в невращающейся части 1 корпуса может быть дополнительно установлен датчик 31, вза- имодействую11Д1Й с активными элементами 32 и 33, выполненными на любой из зубчатых реек 17 или 19, на расстоянии друг от друга, равном расстоянию между серединами зубчатых венцов конической шестерни 16 и любой полумуфты 1 О или 11.
При установке таких дополнительных механизмов числа зубьев конической шеегерни 8 должно быть равно или кратно числу зубьев полумуфт 9- 11, а зубья конической шестерни 16 должны быть сгрого ориентированы по угловому положению относительно вращающейся части 2 корпуса, и это положение внесено в память системы управления промькипенного ррбота.
Захватное устройство промышленного робота работает следующим образом.
Вра1иение от привода 24 через полый вал 25, шпоночное или шлицевое соединение с валом 3 привода передается на втулку Ь, которая полумуфтой 9, сцепленной с полумуфтой 10, вращает спиральныГ диск 12, перемещающий в cHoi j очере/;), рейки-кулачки 14.
по команде конического выключателя (не показан), установленного на корпусе 23.
Далее по сигналу системы управ25 ления привод 24, вращая вал 5 привода и втулку 6, вращает конические шестерни 8 и 16. Коническая шестерня 16, будучи жестко соединенной с вращающейся частью 2 корпуса, вращает ее и закрепленные на ней схваты 3 и 4 вокруг своей оси. Повернув вращающуюся часть 2 корпуса на ISO , привод 24 останавливается - произошла смена местами схватов 3 и 4.
При ходе захватного устройства
35 вниз конец зубчатой рейки 19 освобождается и под действием пружины 18 зубчатая рейка 17 перемещает своим выступом 21, введенным в кольцевой паз 7, втулку 6, при перемещении которой расцепляются конические шестерни 8 и 16 и одновременно соединяются полумуфты 9 и 11.
Вращением привода 24 можно с помощью схвата 4 осуществлять зажим
5 или освобождение заготовки.
Цикл многократно повторяется в процессе работы промышленного робота.
Кроме того, в рабочем положении
(например, при зажиме или освобождении заготовки), когда конец зубчатой рейки 19 и конец подвижного толкателя 28 не взаимодействуют с корпусом 23, фиксатор 26 введен в гнездо 29
55 и удерживается там пружиной 27,
что обеспечивает надежную и точную фиксацию вращающейся части 2 корпуса относительно его невращающейся
40
В зависимости от направления вращения происходит зажим заготовки или ее освобождение из схвата 3. После, например, зажима заготовки, находящейся в технологической таре, захватное устройство движется вверх, вынимая заготовку из этой тары.
В конце хода захватного устройства зубчатая рейка 19 своим концом упирается в корпус 23 и при дальнейшем , его движении она через зубчатое колесо 20 перемещает зубчатую рейку 17, сжимая пружину 18. Выступ 21, двига- ясь вместе с зубчатой рейкой 17, пере- мещйет втулку 6, расцепляя полумуфты 9 и 10 и зацепляя коническую шестерню 8 с конической шестерней 16. После полного зацепления захватное
по команде конического выключателя (не показан), установленного на корпусе 23.
Далее по сигналу системы управ5 ления привод 24, вращая вал 5 привода и втулку 6, вращает конические шестерни 8 и 16. Коническая шестерня 16, будучи жестко соединенной с вращающейся частью 2 корпуса, вращает ее и закрепленные на ней схваты 3 и 4 вокруг своей оси. Повернув вращающуюся часть 2 корпуса на ISO , привод 24 останавливается - произошла смена местами схватов 3 и 4.
При ходе захватного устройства
5 вниз конец зубчатой рейки 19 освобождается и под действием пружины 18 зубчатая рейка 17 перемещает своим выступом 21, введенным в кольцевой паз 7, втулку 6, при перемещении которой расцепляются конические шестерни 8 и 16 и одновременно соединяются полумуфты 9 и 11.
Вращением привода 24 можно с помощью схвата 4 осуществлять зажим
5 или освобождение заготовки.
Цикл многократно повторяется в процессе работы промышленного робота.
Кроме того, в рабочем положении
(например, при зажиме или освобождении заготовки), когда конец зубчатой рейки 19 и конец подвижного толкателя 28 не взаимодействуют с корпусом 23, фиксатор 26 введен в гнездо 29
5 и удерживается там пружиной 27,
что обеспечивает надежную и точную фиксацию вращающейся части 2 корпуса относительно его невращающейся
0
части 1, а также гарантирует темное совпадение оси вала привода 5 с осью схвата 3.
В этом положении полумуфта 9 введена в полное запепление с полумуфтой 10 и это положение, через кинематическую связь полумуфты 9 с зубчатой рейкой 19, зафиксировано срабатыванием датчика 31 от воздействия активного элемента 32, расположенного на этой зубчатой рейке.
Для конструкции с дополнительно введенными механизмами расстояние между зубчатыми венцами конической шестерни 8 и полумуфты 9 выгголнено таким, что обеспечивается их промежуточное положение на валу Ь привода в котором ни та, ни другая в запепле нии не находится.
Таким образом, поскольку втулка 6 находится Б свободно 1 состоянии, можно установить коническун) шестерню 8 в такое угловое положение, которое обеспечивает ее гарантироБан-Иое введение в запепление с конической шестерней 16.
Это достигается сравнением введенной в память системы управления постоянного углового положения (следовательно, и положения ) конической шестерни 16 с TeKyi- им угловым положением полумуфты 9 в тех состояниях, когда 4acTVi 1 и 2 корпуса зафиксированы друг огноснтельно друга через фиксатор 26 и гнезда 29 и 30.
По команде системы управления привод 24 устанавливает коническую шестерню 8 в такое положение, когда один из ее зубьев установится против впадины меткду зубьями конической шестерни 16. Лалее при последующем перемещении захватного устройства вверх конец подвижного толкателя 28 упирается в корпус 23 и, перемещаясь, воздсйствует например на наклонный выступ ипи наклонный вырез в теле фиксатора 26, выводя тем самым фиксатор из гнезда 29. В период выхода фиксатора 26 из гнезда 29 конические шестерни 8 и 16 входят в зацепление и при достижении их полного зацепления активный элемент 33 доходит до датчика 31, воздействуя на него, датчик 31 выдает сигнал в систему уп-, равления промьпиленного робота, которая по этому сигналу вносит в
5
0
5
0
5
0
5
0
5
память угловое положение всех эле7 ментов, делает отметку, что произошло зацепление, и прекращает движение захватного устройства. В этом положении фиксатор 26 полностью выведен из гнезда 29, следовательно, можно осуществлять смену местами схватов 3 и 4.
По командам системы управления привод 24 меняет местами схваты 3 и 4. Далее также по команде системы управления захватное устройство движется вниз, удаляясь от кор- пуса 23, при этом начинает освобождаться подвижный то 1катель 28 и зубчатая рейка 19, причем фиксатор 26 входит в гнездо 30 до расцепления конических щестерен 8 и 16, предотвращая тем самым самопроизвольный поворот вращающейся части 2 корпуса.
После выхода из зацепления конических шестерен 8 и 16 втулка 6 оказывается в свободном состоянии. Система управления дает команду приводу 24 на поворот полумуфты 9 и одновременно сравнивает ее угловое положение с угловым положением полумуфты 11, ранее внесенным в ее память.
При совмещении одного из зубьев полумуфты 9 с впадиной между зубьями полумуфты 11 система управления подает команду и захватное устройство движется по направлению от корпуса 23 1 пoлн JCTью освобождает зубчатую рейку 19, а вместе с ней и пружину 18, под действием которой ч(у)ез зубчатую рейку 17 и втулку 6 полумуфта 9 входит в зацепление с полумуфтой 11. В этот момент активный элемент 32 воздействует на датчик 31, по сигналу которого система управления вносит в память угловое положение всех элементов, делает отметку, что произошло зацепление, и подает команду на зажим или освобождение заГО ГОБКИ.
Пикл повторяется при дальнейшей работе промьшшеиного робота.
Формула из тения
во вращающейся части корпуса смонтированы два самоцентрирующихся схвата, продольные оси которых расположены под углом 90° одна относительно другой, а точка их пересечения лежит на оси вращения, делящей этот угол пополам, о т л и ч а ю- щ е е с я тем, что, с целью уменьшения энергоемкости, а также габаритов захватного устройства за счет обеспечения попеременной работы схватов от одного привода, оно снабжено установленными в невращающейся части корпуса передаточным звеном и механизмом его сцепления с приводным элементом схвата или с дополнительно введенной конической шестерней, жестко закрепленной на оси вращающейся части корпуса, при этом передаточное звено выполнено в виде втулки с кольцевым пазом, смонтированной заодно с конической шестерней и полумуфтой на валу привода подвижно вдоль его оси с возможностью попеременного сцепления соответственно с конической шестерней вращения корпуса или с полумуфтой приводного элемента схвата, а механизм
0
0
сцепления выполнен из двух зубчатых реек, связанных одна с другой посредством зубчатого колеса, причем одна из реек установлена с возможностью взаимодействия своим концом с корпусом механизма подъема, а другая подпружинена и имеет выступ, имеющий возможность расположения в кольцевом пазу втулки передаточ}1ого механизма.
| Захмагное усч ройство промышленного робота | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
