Изобретение относится к специальному технологическому оборудованию, а именно к исполнительным органам разнообразных промышленных роботов или манипуляторов, применяемых во всех отраслях машиностроения.
Целью изобретения является повышение точности позиционирования за счет компенсации веса переносимой заготовки реактивной силой струи сжатого воздуха, направленной вертикально вверх, и уменьшение массы за счет отсутствия привода компенсации.
На чертеже изображена рука робота, общий вид.
Рука робота содержит горизонтально расположенный стержень I трубчатого сечения, один конец которого жестко или подвижно установлен в корпусе 2 робота, а на другом установлено захватывающее устройство 3, зажимающее заготовку 4. Па стержне 1 закреплен датчик 5 дефор- .маций, например тензометрический, а также сопло 6, установленное на конце стержня 1 и направленное вертикально вниз. Причем сопло fj связано с дополнительно введенной напорной магистралью (не показана I .
ZlaT4HK 5 деформаций закреплен на стержне 1, находящемся в состоянии деформации or собственного веса и веса захватывающего устройства. Это положение считается нулевым или исходным.
Рука робота работает следующим обра0
5
0
5
0
При функционировании руки робота захватывающее устройство 3 фиксирует заготовку 4 и начинает поднимать при этом стержень 1 деформируется от веса заготовки 4, а датчик 5 деформации выдает сигнал в систему управления робота о величине деформации стержня 1. В зависимости от величины деформации стержня 1, вызванной весом заготовки 4, система управления выдает сигнал команды, пропорциональный по величине сигналу датчика 5, устройству изменения расхода воздуха (не показано), проходящего через сопло 6 в напорную магистраль. Реактивная сила тяги сжатого воздуха изгибает стержеиь 1 в направлении, противоположном изгибу, вызванному весом заготовки 4. Таким образом деформация стержня 1 компенсируется, а суммарная деформация равна или близка к нулю. Стержень 1 вместе с заготовкой 4 вне зависимости от его веса находится в одном и том же нулевом положении.
Формула изобретения
Рука робота, содержащая горизонтально расположенный стержень, на одном конце которого размещено захватывающее устройство, задатчик деформации и устройство компенсации, отличающаяся тем, что, с целью повышения точности позиционирюва- ния и уменьшения массы, устройство компенсации выполнено в виде сопла, установленного на конце стрежня, причем сопло направлено вертикаьно вниз и связано с введенной напорной магистралью.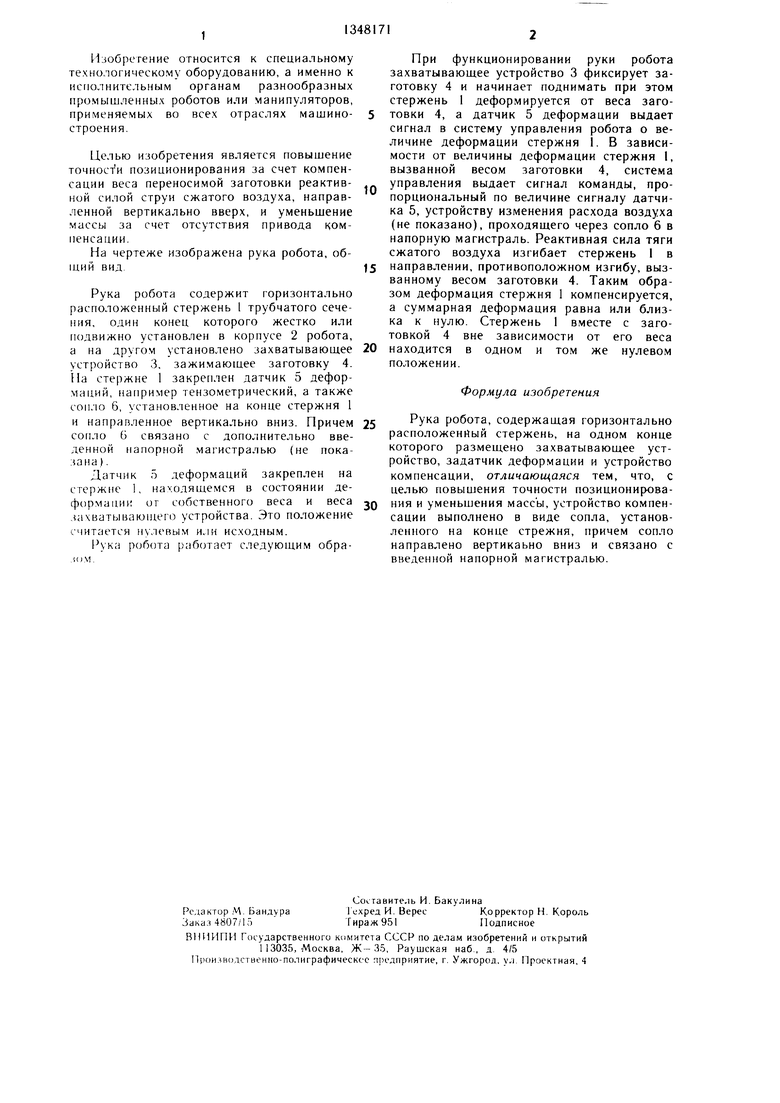
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Механическая рука манипулятора | 1986 |
|
SU1440710A1 |
| Промышленный робот | 1987 |
|
SU1414643A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Способ шовной роликовой сварки деталей с криволинейным профилем и устройство для его осуществления | 1987 |
|
SU1544176A3 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА И ЕЕ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2751753C1 |
| ОЦЕНКА УСИЛИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ МИНИМАЛЬНОГО ИНВАЗИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2462342C2 |
Изобретение относится к специальному технологическому оборудованию, а именно к исполнительным органам разнообразных промышленных роботов или манипуляторов, применяемых во всех отраслях viaiHuiio- строения. Целью изобретения является повышение точности позиционирования за счет компенсации веса переносимой заготовки реактивной силой струи сжато1 о воздуха, направленной вертикально вверх, и уменьшение веса за счет отсутствия привода ком пенсации. Для этого на горизонтально расположенном стержне 1 трубчатого сечения, один конец которого жестко или нодвиж- но установлен в корпусе 2 робота, а на другом установлено захватывающее устройство 3, закреплен датчик 5 деформаций, например тензометрический, и сопло 6, направленное вертикально вниз. Причем con:io 6 связано с дополнительно введенной напорной магистралью. При функционировании руки робота захватывающее устройство 3 фиксирует заг отовку 4 и начинает поднимат), njMi этом стержень 1 деформируется от веса за1 отовки и датчик 5 деформации выдает сигнал в систему управлении о величи)1е деформации. В зависимости ог велич,1ны деформации подается сиг.чал в устройство изменения расхода воздуха, проходящего через сопло 6 п напорную магистраль. Реакгивная сила тяги сжатого воздуха изгибает стержень 1 в направлении, про- тивогю,тожном изгибу, вызванному весом заготовки 4. I ил. 1Г (Л СА5 4: ОО
| 1978 |
|
SU727427A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
