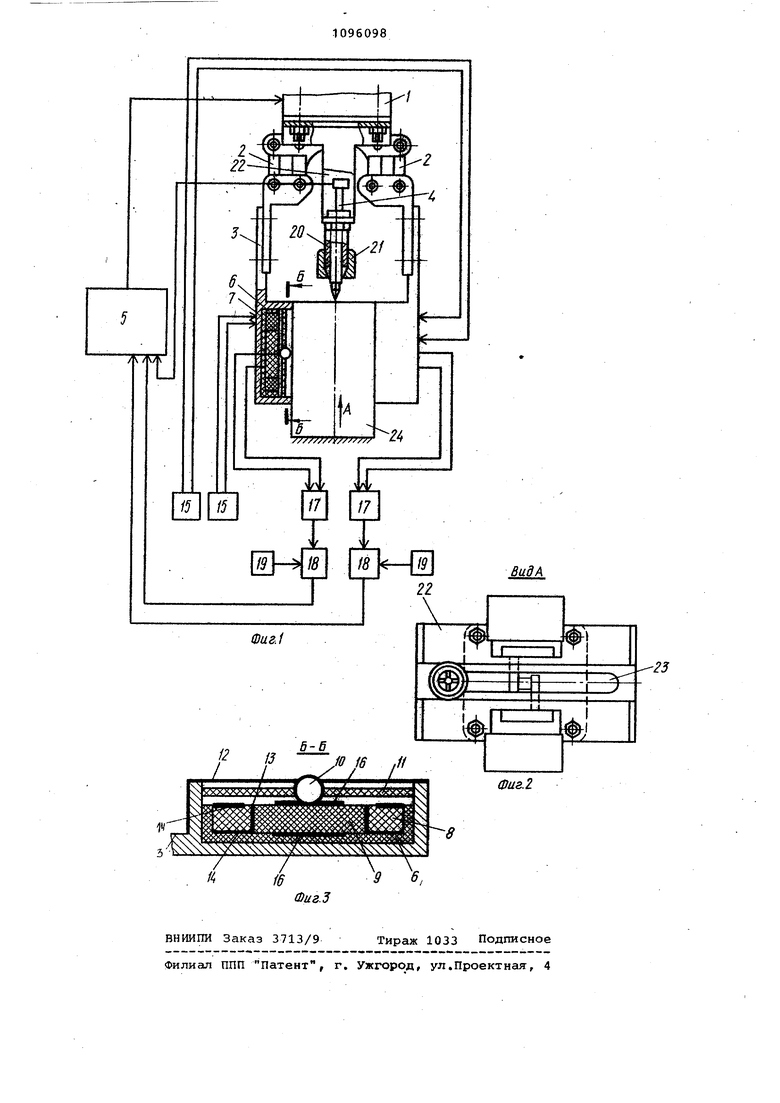
Изобретение относится к машиностроению и может быть использовано для автоматизации производственных процессов с применением промьошленных роботов, снабженных очувствленными схватами. Известен схват манипулятора, содержащий основание, на котором уста новлены зажимные губки, кинематичес ки связанные между собой и снабженные приводом их перемещения, и датчик линейного перемещения со штоком связанный Через систему управления с приводом С13. Однако данное устройство не обес печивает точного измерения и дозиро вания усилия сжатия, адекватного весу захватываемого объекта вследст вие отсутствия датчика, измеряющего это усилие, непосредственно прилагаемое к объекту,что может привести к деформации и излому захватываемого объекта. Цель изобретения - исключение повреждения деталей при захватывани Поставленная цель достигается тем, что схват мунипулятора, содержащий основание, на котором установ лены зажимные губки, кинематически связанные между собой и снабженные приводом их перемещения, датчик лин ного перемещения со штоком, связанный через систему управления с приводом, снабжен датчиками усилия сжа тия, установленными на губках, гене ратором, усилителем, блоком детекти рования и блоком компенсации, при этом датчик усилия сжатия выполнен а виде пьезоэлектрического полого цилиндра, снабженного электродами, установленными на торцах, пьезоэлек рического стержня, снабженного электродами, установленными на торцах, расположенного внутри цилиндра и жестко с ним связанного через диэлектрическую прокладку, и мембраны жестко соединенной с губкой и связанной через шаровую опору, закрепленную в сепараторе, со стержнем, а электроды цилиндра соединены с гене ратором, при этом электроды стержня подключены к входу усилителя, выход усилителя соединен с одним из входо блока детектирования, другой вход которого подключен к выходу блока компенсации, выход блока детектирования соединен с входом системы управления, Кроме того, схват снабжен закреп ленным на основании кронштейном, в котором выполнен паз, и втулкой с цанговым зажимом, расположенной в пазу кронштейна с возможностью пере мещения вдоль губок, при этом датчик линейного перемещения установлен во втулке. На фиг. 1 изображен схват манипу лятора, общий вид; на фиг. 2 - вид А на фиг. 1;.на фиг. 3 - разрез Б-Б на фиг. 1. Схват манипулятора состоит из основания 1, звеньев 2 привода перемещения разъемных губок 3 схвата и индуктивного датчика 4 линейного перемещения с подвижным штоком, выход которого связан с системой 5 управления робота. В каждую губку 3 схвата встроен изолированный от корпуса губки коробкой б датчик 7 усилия сжатия, выполненный в виде пьезоэлектрического полого цилиндра 8 и цилиндрического стержня 9, входящего в него. Шаровая опора 10 закреплена в сепараторе 11 и кинематически связывает стержень 9 с мембраной 12, которая жестко закреплена на торцовой поверхности губки З.При этом полый цилиндр 8 и входящий в него стержень 9 жестко связаны между собой через диэлектрическую прокладку 13, а электроды 14, установленные на торцах полого пьезоэлектрического цилиндра, соединены с генератором 15. Торцовые электроды 16 ,пьезоэлектрического стержня соединены с усилителем 17, выход которого подключен к одному из входов блока 18 детектирования, другой вход которого соединен с блоком 19 компенсации, Выход блока детектирования соединен с входом системы 5 управления, выход которой подключен к приводу перемещения губок схвата {не показан ). Датчик 4 линейного перемещения установлен во втулке 20, в нижней части которой имеется цанговый зажим 21, обеспечивающий вертикальное перемещение датчика .относительно губок схвата, втулка 20 соединена с кронштейном 22, в котором сделан паз 23 для обеспечения горизонтального перемещения датчика относительно губок схвата, при этом кронштейн 22 жестко соединен с основанием 1 схвата. Вертикальное и горизонтальное перемещение датчика линейного перемещения позволяет точно устанавливать его относительно захватываемой детали 24 и тем самым способствует точности измерения усилия сжатия. Схват манипулятора работает следующим образом. Схват с разведенными губками подводится к захватываемой детали 24 так, что последняя оказывается между губками 3. Система 5 управления подает команду на опускание схвата. При опускании схвата шток датчика 4 входит в соприкосновение с деталью и поднимается в верхнее положение. После этого в систему 5 управления поступает команда на остановку схвата и сжатие детали. Сигнал управления поступает на привод перемещения губок схвата ( не показан ), который приводит их в движение. Усилие сжатия через мембрану 12 и шаровую опору 10 воздействует на пьезоэлектрический цилиндрический стержень 9, который жестко соединен через диэлектрическую прокладку 13 с полым пьезоэлектрическим цилиндром 8. Диэлектрическая прокладка изолирует генераторную секцию полого цилиндра от информационной секции, связанной со стержнем. Материал диэлектрическо прокладки выбирается из условия совпадения акустических сопротивлений пьезоэлектрических элементов и прокладки, что уменьшает ослабление механического сигнала на границе раздела. При подключении электродов 14 полого цилиндра 8 к генератору 15, настроенному на резонансную частоту продольных колебаний, на электродах 16 цилиндрического стержня 9 появляется электрический заряд, изменяющийся с частотой механических колебаний полого цилиндра 8, амплитуда которого зависит от измеряемого стати ческого усилия сжатия, прикладываемого к детали 24.Блок 19 компенсации сдвигает начало отсчета усилия сжатия IB нулевую точку характеристики, поэтому при увеличении усилия сжатия сигнал, поступающий в систему 5 упра ления, будет не уменьшаться, а увели чиваться, сравниваться с сигналом управления задающего устройства,расположенного в системе 5 управления, и отрабатываться приводом перемещения губок схвата. После сравнения этих сигналов система управления подает команду подъема схвата. Ввиду недостаточности сжимающего усилия захватываемый объем остается на месте или в процессе подъема схвата начинает проскальзывать в.губках Следовательно, шток датчика 4 начинает опускаться. Сигнал с датчика 4 поступает в систему управления, которая автоматически начинает отрабатывать недостающее сжимающее усилие. При достаточном для захватывания усилии деталь начинает подниматься вместе со схватом и шток датчика 4 перестает перемещаться, прекращая увеличивать сигнал дозирования сжимающего усилия. Деталь захвачена. Применейие предлагаемой конструкции схвата позволяет повысить точность измерения и дозирования усилия сжатия широкого по весу класса деталей с силой, не превышающей необходимую для захватывания и исключающей деформацию и излом деталей, а также сэкономить энергетические ресурсы, затрачиваемые на захват деталей при их транспортировке, и увеличить производительность труда за счет сокращения времени, необходимого на операцию захвата деталей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
1. СХВАТ МАНИПУЛЯТОРА, содержащий основание, на котором устанЬвлены зажимные губки, кинематически связанные между собой и снабженные приводом их перемешения, датчик линейного перемещения со штоком, связанный через систему управления с приводом,о тличающийс я тем, что, с целью исключения повреждения деталей при захватывании, он снабжен датчиками усилия сжатия, установленными на губках, генератором, усилителем, блоком детектирования и блоком компенсации, при этом датчик усилия сжатия выполнен в виде пьезоэлектрического полого цилиндра, снабженного электродами. установленными на торцах, пьезоэлектрического стержня, снабженного электродами, установленными на торцах, расположенного внутри цилиндра и jiRecTKo с ним связанного через диэлектрическую прокладку, и мембраны, жестко соединенной с губкой и связанной через шаровую опору, закрепленную в сепараторе, со стержнем, а электроды цилиндра соединены с генератором, при этом электроды стержня подключены к входу усилителя, а выход усилителя соединен с одним из входов блока детектирования, другой вход которого подключен к выходу блока компенсации, а выход блока детектирования соединен с входом систе-g мы управления. 2. Схват ПОП.1, отличаю(О щийся тем, что он снабжен закрепленным на основании кронштейном, в котором выполнен паз, и втулкой с цанговым зажимом, расположенной в пазу кронштейна с возможностью перемещения вдоль губок, причем датчик линейного перемещения установлен во втулке. ;о О) о со 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
