00
00
Изобретение относится к робототехнике и может быть использовано в производстве промышленных роботов повышенной точности и для повышения точ- ности позиционирования действующих промышленных роботов.
Цель изобретения - повышение точности позиционирования механической руки робота путем компенсации дефор- мадий от изгиба и кручения.
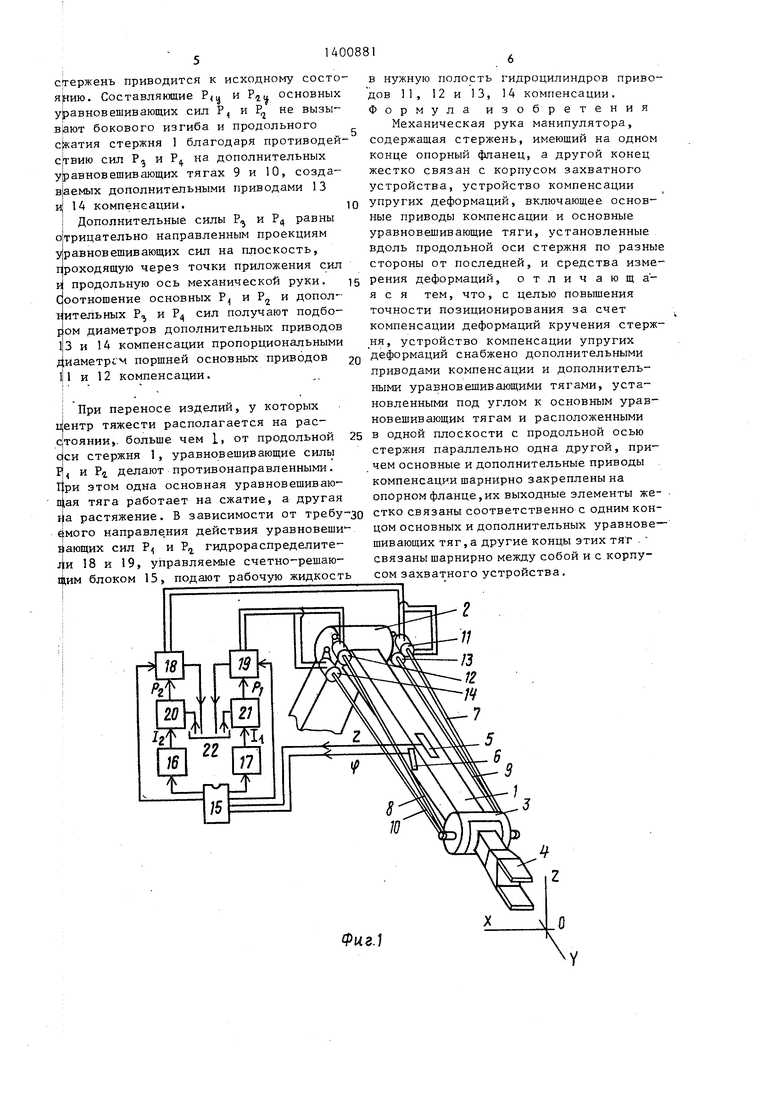
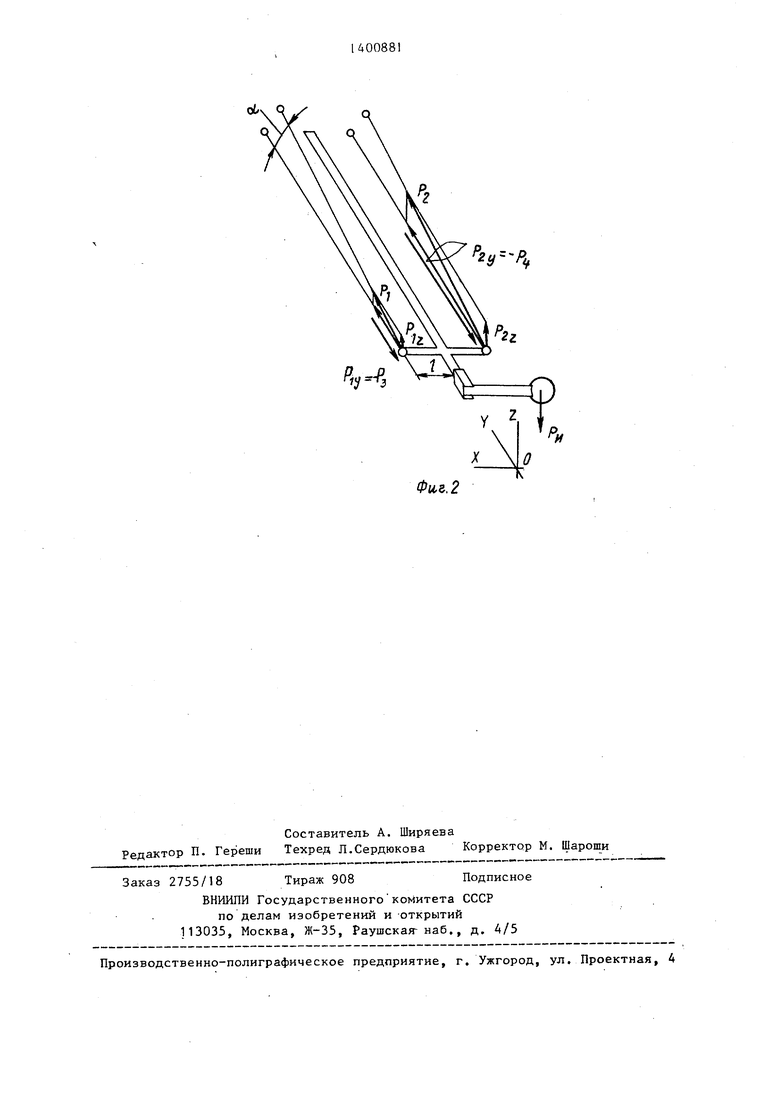
На фиг. 1 изображена механическая рука манипулятора с устройством для автоматической компенсации ее упругих деформаций; на фиг. 2 - схема сил, действующих на механическую руку.
Механическая рука манипулятора состоит из стержня 1, на одном из концов которого закреплен опорный фланец 2, связанный с корпусом манипулятора (не показан), а другой конец жестко связан с корпусом 3 захватного устройства 4, средств 5 и 6 измерения деформаций и устройства компенсации упругих деформаций.
Средства 5 и 6 измерения деформации, служащие для измерения деформации соответственно прогиба и угла закручивания, выполнены в виде, наприг мер, тензометрических датчиков. Уст- ройство компенсации упругих деформаций включает основные 7 и 8 и дополнительные 9 и 10 уравновешивающие тяги, основные 11 и 12 и дополнительные 13 и 14 приводы компенсации, например гидроцилиндры, шарнирно установленные на опорном фланце 2, и систему управления, обеспечивающую в зависимости от величины прогиба и угла закручивания выработку уравновешивающих сил Р и 7 на основных и Р и Р на дополнительных уравновешиваюших тягах.
Основные 7 и 8 и дополнительные 9 и 10 уравновешивающие тяги установлены по разные стороны от продольной оси стержня так, что дополнительные уравновешивающие тяги 9 и 10 располагаются в одной плоскости с продольной осью стержня 1 и параллельны друг другу, каждая из дополнительных уравновешивающих- тяг 9 и 10 составляет с соответствующей основной уравновешивающей тягой 7 и 8 угол ui 5-15 , причем одни концы основных 7 и 8 и дополнительных 9 и 10 уравновешивающих тяг жестко связаны с выходными элементами (штоками) соответствующих основных 11 и 12 и дополнительных 13 и 14 приводов компенсации, а дру
гие их концы шарнирно связаны с корпусом 3 захватного устройства 4. При этом точки крепления этих тяг с кор- пусом 3 захватного устройства 4 рас- положены симметрично продольной оси стержня 1. Основные 11 и 12 и дополнительные 13 и 14 приводы компенсации попарно связаны общими гидравлическими магистралями. Запоршневые полости одних гидроцилиндрОв связаны со штоковыми полостями других гидро- цилиндров.
Система управления выполнена в виде системы уравнения с обратной связью в зависимости от деформаций механической руки. Ее задачей является сведение к нулю измеряемых деформаций стержня 1 путем выработки уравновешивающих сил на основных уравнове- щив ающих тя г ах 7 и 8.
1
,г
2. sinoilAtB),
где А j - Z
О г 0
5
0
В у JK|, ,;
Р и Pj - величины уравновешивающих сил;
Jh Jкр жесткость стержня на изгиб и кручение соответственно;
0 Ч о прогиб и угол закручивания свободного конца
Iстержня, вызванные весом
переносимого изделия при отсутствии компенсации; L расстояние от точки приложения, уравновешивающей силы до продольной оси стержня.
Для компенсации бокового изгиба и продольного сжатия стержня в точках приложения уравновешивающих сил Р| и Р прикладывают дополнительные силы Р и Р, которые определяют как отрицательно направленные проекции уравновешивающих сил Р и Р на плоскость, проходящую через точки приложения сил и продольную ось стержня. Перпендикулярные к оси стержня 1 составляющие уравновешивающих сил
. 1
.г
S I п об
(А t В),
где А j „ Zj
1
J кр Ч ,
о
приложенных симметрично и наклонно к продольной оси стержня, дают равнодействующую A/sincK , которая компенсирует прогиб вызванный весом переносимого изделия и момент Bl/sinot относительно оси стержня, который компенсирует ее закручивание .
Приложение дополнительных сил Р и Р, определенных как отрицательно направленные проекции уравновешивающих сил Р( и Р на плоскость, проходящую через точки приложения сил и продольную ось стержня 1, позволяет компенсировать боковой изгиб и про- дольное сжатие, вызванные действием проекций уравновешивающих сил Р и Р на плоскость, проходящую через точки приложения сил и продольную ось стержня 1 ..
Закон изменения уравновешивающих сил на выходе cиcтe aI управления в зависимости от измеряемых деформаций Z и Cf определяется передаточными функциями
W,(Р)
А(Р)
W(P)
где А(Р), B(P),,Z(P) и С|(Р) - изоб- ражения по Лагшасу соответствующих величин.
Например, для пропорционального закона управления W(P)K, z закон изменения уравновешивающих сил имеет вид
.ч-).
4Л
2.sin ct
(K,Z
Система управления с пропорцио- нальньш законом управления не обеспечивает полной компенсации деформации- Остаточные деформации Z и if тем меньше, чем больше К, и К. Этого недостатка лишен, например, пропорциональ- ногинтегральный. регулятор с передаточными функциями
К,
К
71
+ Jill Р
Система управления состоит из счетно-решающего блока 15, на вход которого подключены средства 5 и 6 измерения деформаций, реализующего
0
5
выбранный закон управления, при этом одна пара электрических выходов блока 15 связана с усилителями 16 и 17, реализующими необходимые коэффициенты усиления, а другая - с гидрораспределителями 18 и 19. На электрические выходь усилителей 16 и 17 подключены электрогидравлические преобразователи 20 и 21, гидравлические выходы которых соединены с баком 22 для рабочей жидкости, а гидравлические выходы связаны через ги,дрораспределите- ли 18 и 19 с приводами 11-14 компен- с ации.
Средства 5 и 6 измерения деформаций закрепляют на стержне 1, находящемся в состоянии деформации от собственного веса. Это положение считают нулевым или исходным. При этом усилия натяжения всех тяг равны нулю.
Механическая рука манипулятора работает следующим образом.
При переносе изделия, у которого
5 центр тяжести не лежит на продольной оси руки робота, происходит прогиб и закручивание стержня 1. Средства 5 и 6 измерения деформации выдают сигналы счетно-решающему блоку 15, за0 висящие соответственно от величины прогиба Z и угла Cf закручивания конца стержня, несущего захватное устройство. Счетно-решающий блок 15 подает на выходы усилителей 16 и 17 соответствующие сигналы управления компенсацией упругих деформаций. После усиления сигналы управления поступают на электрогидравлические преобразователи 20 и 21, на выходе кото0
5
рых создаются давления Р, и Р рабочей жидкости, пропорциональные входным токам 1| и 1. Рабочая жидкость, проходя через гидрораспределители 18 и 9, поступает к приводам 11-14 компенсации, которые обеспечивают усилия Р и Р на основных уравновешивающих тягах 7и8иР иР на дополнительных уравновешивающих тягах 9 и 10.
Равнодействующая перпендикулярных к продольной оси стержня 1 составляющих и основных уравновешивающих сил Р , и Р- изгибает стержень 1 в направлении, противоположном прогибу, вызванному весом Р переносимого gg изделия. Момент этих составляющих относительно продольной оси стержня закручивает его в направлении, противоположном закручиванию, вызванному весом переносимого изделия. Тем самым
сггерженъ приводится к исходному состо :
основных не вызы
„
я|нию. Составляющие Р,, и Р у|равновешиваю1цих сил Р и бокового изгиба и продольного с|жатия стержня 1 благодаря противодей с.гвию сил Р и Р на дополнительных уравновешивающих тягах 9 и 10, создаваемых дополнительными приводами 13 и 14 компенсации.
I Дополнительные силы Р, и Р равны отрицательно направленным проекциям уравновешивающих сил на плоскость, проходящую через точки приложения сил и продольную ось механической руки. Соотношение основных Р и Р и допол- 15ительных P-J и Р сил получают подбором диаметров дополнительных приводов 13 и 14 компенсации пропорциональными .иаметрс м поршней основных приводов l 1 и 12 компенсации.
LI
При переносе изделий, у которых
центр тяжести располагается на расстоянии j. больше чем 1, от продольной оси стержня 1, уравновешивающие силы F и PI делают противонаправленными.
2д деформаций снабжено дополнительными приводами компенсации и дополнительными уравновешивающими тягами, установленными под углом к основным уравновешивающим тягам и расположенными в одной плоскости с продольной осью стержня параллельно одна другой, причем основные и дополнительные приводы компенсации шарнирно закреплены на опорном фланце,их выходные элементы же-
Гри этом одна основная уравновешиваюП1ая тяга работает на сжатие, а другая
;а растяжение. В зависимости от требу- ЗО стко связаны соответственно с одним кон€мого направле.ния действия уравновеши - цом основных и дополнительных уравновешивающих тяг,а другие концы этих тя г . связаны шарнирно между собой и с корпусом захватного устройства.
J ающих сил Р и РО гидрораспределите- и 18 и 19, управляемые счетно-решаю- блоком 15, подают рабочую жидкость
ФмзЛ
5
-
в нужную полость гидроцнлиндров приводов 11, 12 и 13, 14 компенсации. Формула изобретения
Механическая рука манипулятора, содержащая стержень, имеющий на одном конце опорный фланец, а другой конец жестко связан с корпусом захватного устройства, устройство компенсации
10 упругих деформаций, включающее основ- ные приводы компенсации и основные уравновешивающие тяги, установленные вдоль продольной оси стержня по разные стороны от последней, и средства изме15 рения деформаций, отличающаяся тем, что, с целью повышения точности позиционирования за счет компенсации деформаций кручения стержня, устройство компенсации упругих
2д деформаций снабжено дополнительными приводами компенсации и дополнительными уравновешивающими тягами, установленными под углом к основным уравновешивающим тягам и расположенными в одной плоскости с продольной осью стержня параллельно одна другой, причем основные и дополнительные приводы компенсации шарнирно закреплены на опорном фланце,их выходные элементы же-
25
/5у-,
Фи,в.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука манипулятора | 1986 |
|
SU1440710A1 |
| Рука робота | 1986 |
|
SU1348171A1 |
| Запястье манипулятора | 1990 |
|
SU1754440A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1980 |
|
SU869931A1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Изометрическая задающая система | 1980 |
|
SU920644A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
Изобретение относится к робототехнике и может быть использовано в производстве промышленных роботов повышенной точности. Целью изобретения является повьппение точности позиционирования за счет компенсации деформации от изгиба и кручения механической руки. Это достигается тем, что на основных 7 и 8 и дополнительных 9 и 10 уравновешивающих тягах, расположенных под углом друг к другу, создают уравновешивающие силы Р, Р, Р, и , позволяющие компенсировать деформации, создаваемые силой тяжести переносимого изделия. Уравновешивающие силы Р и Р создаются основными приводами компенсации 1 и 12 в зависимости от величины прогиба и угла закручивания, а дополнительные силы Р и Р - дополнительными приводами 13 и 14 компенсации. 2 ил.
| 1978 |
|
SU727427A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
