(Л
/2
4
Изобретение относится к робототехнике и может быть использовано в производстве промышленных роботов повышенной точности и для повышения точности позиционирования действующих промышленных роботов.
Цель изобретения - снижение энергозатрат механической руки за счет уменьшения приводов.
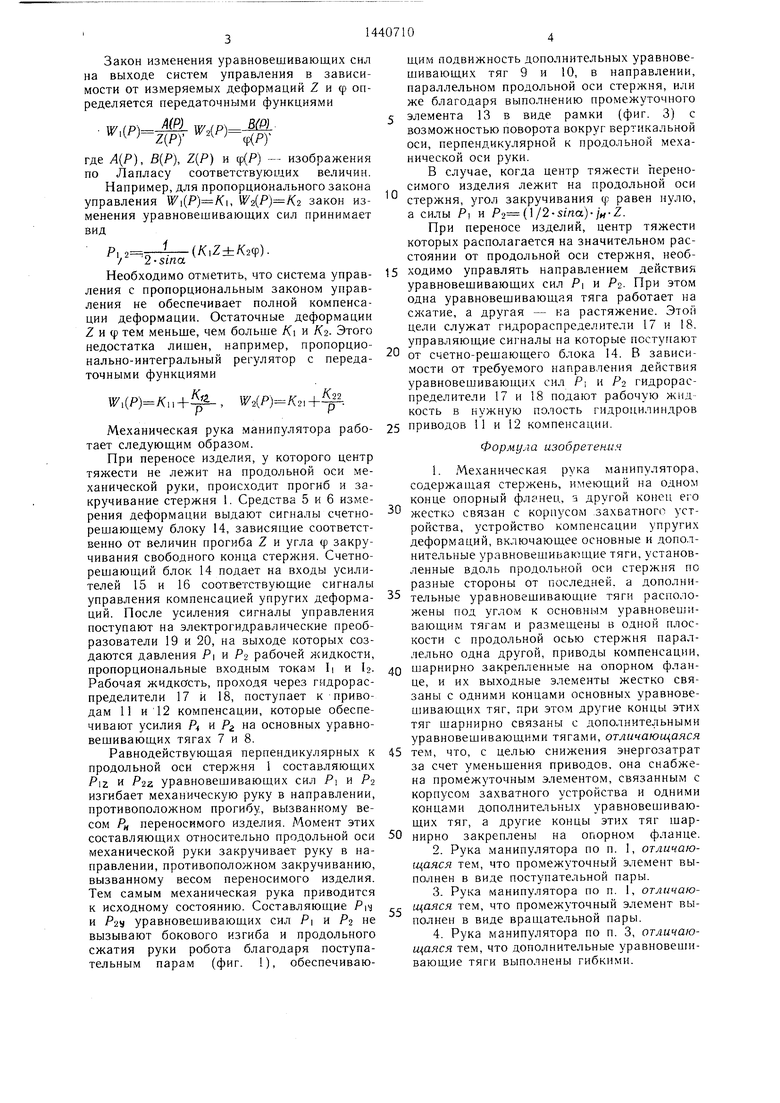
На фиг. 1 изображена механическая рука манипулятора с устройством для компенсации ее упругих деформаций, использующим поступательные пары в местах соединения дополнительных тяг со свободным концом механической руки манипулятора; на фиг. 2 - схема сил, действующих на механическую руку, изображенную на фиг. I; на фиг. 3 - механическая рука манипулятора с устройством для компенсации ее,упругих деформаций, использующим вращательную пару в качестве промежуточного элемента между дополнительными уравновешивающими тягами и свободным концом механической руки; па фиг. 4 - схема сил, действующих на механическую руку, изоб.- раженную на фиг. 3.
Механическая рука манипулятора состоит из стержня 1, имеющего на одном конце опорный фланец 2, связанный с корпусом манипулятора (не показан), а другой его конец жестко связан с корпусом 3 захватного устройства 4, средств 5 и 6 измерения деформаций и устройства компенсации упругих деформаций.
Средства 5 и 6 измерения деформаций, служащие соответственно для изменения дефор.маций прогиба и угла закручивания, выполнены, например, в виде тензо- метрических датчиков.
Устройство компенсации упругих деформаций включает основные 7 и 8 и дополнительные 9 и 0 уравновешивающие тяги, приводы 11 и 12 компенсации, например гидроцилиндры, шарнирно установленные на опорном фланце 2 стержня 1, и систему управления, обеспечивающую выработку уравновешивающих сил P| и Pi на основных уравновещивающих тягах 7 и 8.
Основные 7 и 8 и дополнительные 9 и 10 уравновешивающие тяги установлены по разные стороны от продольной оси стержня, причем основные уравновещивающие тяги 7 и 8 расположены под дополнительными уравновешивающими тягами 9 и 10 под углом а к посл.едним, а дополнительные уравновешивающие тяги 9 и 10 размещены в одной плоскости с продольной осью стержня 1 и параллельны одна другой. Причем один из концов каждой из основных уравновешивающих тяг 8 и 7 жестко связан с выходным элементом (штоком) соответствующего привода 11 и 12 компенсации, а другой конец этих тяг и арнирно связан с соот- ветствуюп1ей дополнительной уравновешивающей тягой 9 и 10. Последние одним
концом шарнирно связаны с опорным фланцем 2, а другой конец этих тяг связан с корпусом 3 захватного устройства 4 посредством промежуточного элемента 13. При этом точки крепления дополнительных уравновещивающих тяг 9 и 10 с промежуточным элементом 13 расположены симметрично продольной оси стержня 1.
Промежуточный элемент 13 может быть выполнен как в виде поступательной пары
0 (фиг. 1), так и в виде вращательной пары (фиг. 3). Поступательная пара обеспечивает подвижность дополнительных уравновещивающих тяг 9 и 10 в направлении, параллельном продольной оси стержня 1. Вращательная пара выполнена в виде рамки, установленной в опорах с возможностью ее поворота вокруг оси, располженной в вертикальной плоскости перпендикулярно продольной оси механической руки. В этом случае дополнительные уравновещивающие тяги
0 9 и 10 могут быть выполнены гибкими. Средства 5 и 6 измерения деформаций подключены на вход системы управления, состоящей из счетно-рещающего блока 14, одна пара выходов которого связана с усилителями 15 и 16, а другая - с гидрорас- пределителями 17 и 18. На электрические выходы усилителей 15 и 16 подключены электрогидравлические преобразователи 19 и 20, гидравлические входы которых соединены с баком 21 для рабочей жидкости, а гид„ равлические выходы связаны через гидрораспределители 17 и 18 с приводами 11 и 12 компенсации.
Средства 5 и 6 измерения деформаций закрепляют на механической руке, находящейся в состоянии деформации от собстс венного веса. Это положение считается нулевым или исходным. При этом усилия натяжения всех тяг равны нулю.
В данном случае используют, например, систему управления с обратной связью по деформации механической руки манипулято0 ра. Ее задачей является сведение к нулю измеряемых деформаций руки манипулятора путем выработки уравновещивающих сил PI и Ра на уравновешивающих тягах
р, (А±В),
i 2-sina
где (-Zo; B j--JKf -фо;
j и /кр - жесткость стержня на изгиб и кручение соответственно,
Zo и фо - прогиб и угол закручивания корпуса захватного устройства без компенсации, вызванные весом переносимого изделия; / - расстояние от точки приложения уравновешивающей силы Р, до продольной оси стержня.
5
0
5
Закон изменения уравновешивающих сил на выходе систем управления в зависимости от измеряемых деформаций Z и ф определяется передаточными функциями
. VK ifP i
W lin-2(ру
где Л(Р), В(Р), Z(P) и ср(Р) изображения по Лапласу соответствующих величин. Например, для пропорционального закона управления Wi(P)K, W2(P)K2 закон изменения уравновешивающих сил принимает вид
1
Р 2-5Ша
(/(:2±/(2ф).
Необходимо отметить, что система управления с пропорциональным законом управления не обеспечивает полной компенсации деформации. Остаточные деформации Z и ф тем меньше, чем больше Ki и К.2- Этого недостатка лишен, например, пропорционально-интегральный регулятор с передаточными функциями
W,(P )Kn+, W 2(P)-/(2i+.
Механическая рука манипулятора работает следующим образом.
При переносе изделия, у которого центр тяжести не лежит на продольной оси механической руки, происходит прогиб и закручивание стержня 1. Средства 5 и 6 измерения деформации выдают сигналы счетно- решающему блоку 14, зависящие соответственно от величин прогиба Z и угла ф закручивания свободного конца стерл ня. Счетно- решающий блок 14 подает на входы усилителей 15 и 16 соответствующие сигналы управления компенсацией упругих деформаций. После усиления сигналы управления поступают на электрогидравлические преобразователи 19 и 20, на выходе которых создаются давления Р и Р рабочей жидкости, пропорциональные входным токам I| и Ь- Рабочая жидкость, проходя через гидрораспределители 17 и 18, поступает к приводам 1 и 12 компенсации, которые обеспечивают усилия Я, и Рг на основных уравновешивающих тягах 7 и 8.
Равнодействующая перпендикулярных к продольной оси стержня 1 составляющих PIZ и 22 уравновешивающих сил PI и Р- изгибает механическую руку в направлении, противоположном прогибу, вызванному весом РН переносимого изделия. Момент этих составляющих относительно продольной оси механической руки закручивает руку в направлении, противоположном закручиванию, вызванному весом переносимого изделия. Тем самым механическая рука приводится к исходному состоянию. Составляющие Р и P2S уравновешивающих сил Р и Р не вызывают бокового изгиба и продольного сжатия руки робота благодаря поступательным парам (фиг. 1), обеспечивающим подвижность дополнительных уравновешивающих тяг 9 и 10, в направлении, параллельном продольной оси стержня, или же благодаря выполнению промежуточного
элемента 13 в виде рамки (фиг. 3) с возможностью поворота вокруг вертикальной оси, перпендикулярной к продольной механической оси руки.
В случае, когда центр тяжести переносимого изделия лежит на продольной оси стержня, угол закручивания ф равен нулю, а силы Р и Р2 (l/2-sma).
При переносе изделий, центр тяжести которых располагается на значительном расстоянии от продольной оси стержня, необ5 ходимо управлять направлением действия уравновешивающих сил PI и PZ. При этом одна уравновещивающая тяга работает на сжатие, а другая - на растяжение. Этой цели служат гидрораспределители 17 и 18. управляющие сигналы на которые поступают
0 от счетно-решающего блока 14. В зависимости от требуемого направления действия уравновешивающих сил Р и Р2 гидрораспределители 17 и 18 подают рабочую жид кость в нужную полость гидроцилиндров
5 приводов 11 и 12 компенсации.
Формула изобретения
1.Механическая рука манипулятора, содержащая стержень, имеющий на одном конце опорный фланец, э другой конец его жестко связан с корпусом .захватного устройства, устройство компенсации упругих деформаций, включающее основные и дополнительные уравновешивающие тяги, установленные вдоль продольной оси стержня по разные стороны от последней, а дополни5 тельные уравновешивающие тяги расположены под углом к основным уравновеи и- вающим тягам и размещены в одной плоскости с продольной осью стержня параллельно одна другой, приводы компенсации,
0 шарнирно закрепленные на опорном фланце, и их выходные элементы жестко связаны с одними концами основных уравновешивающих тяг, при этом другие концы этих тяг шарнирно связаны с дополнительными уравновешивающими тягами, отличающаяся
5 тем, что, с целью снижения энергозатрат за счет уменьшения приводов, она снабжена промежуточным элементом, связанным с корпусом захватного устройства и одними концами дополнительных уравновешивающих тяг, а другие концы этих тяг шар0 нирно закреплены на опорном фланце.
2.Рука манипулятора по п. 1, отличающаяся тем, что промежуточный элемент выполнен в виде поступательной пары.
3.Рука .манипулятора по п. 1, отличаю- г щаяся тем, что промежуточный элемент выполнен в виде вращательной пары.
4.Рука манипулятора по п. 3, отличающаяся тем, что дополнительные уравновешивающие тяги выполнены гибкими.
0
12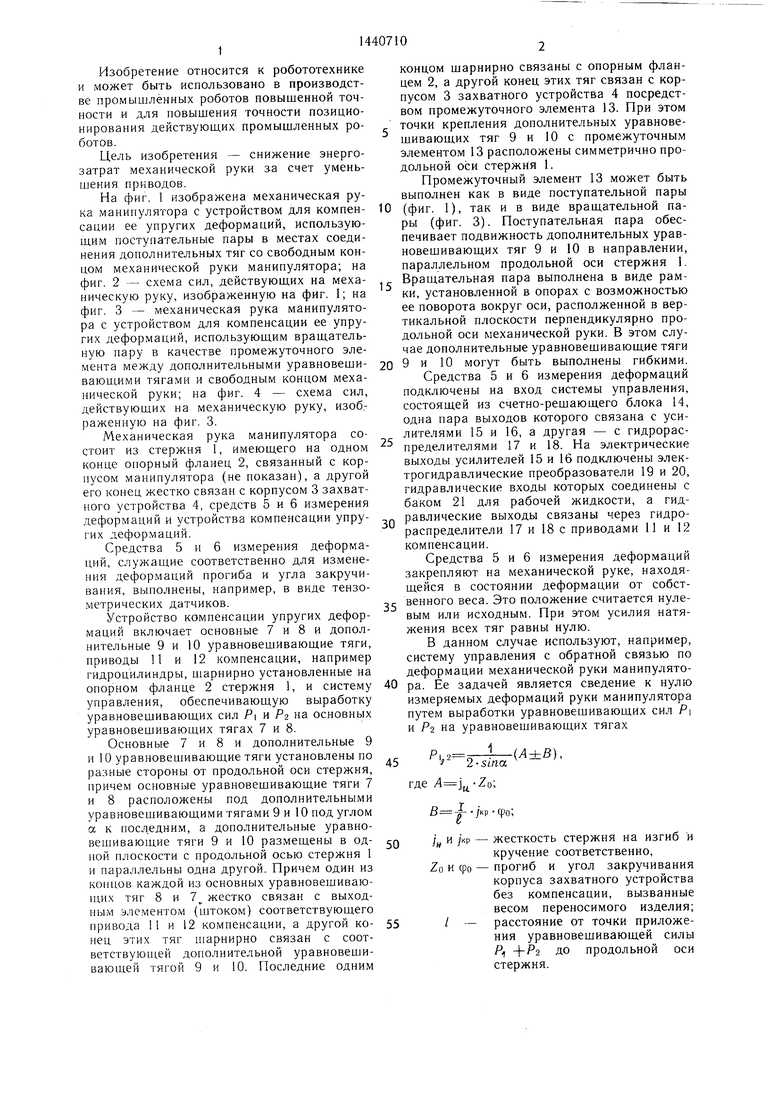
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Запястье манипулятора | 1990 |
|
SU1754440A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Рука робота | 1986 |
|
SU1348171A1 |
| Механическая рука промышленного робота | 1984 |
|
SU1220786A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
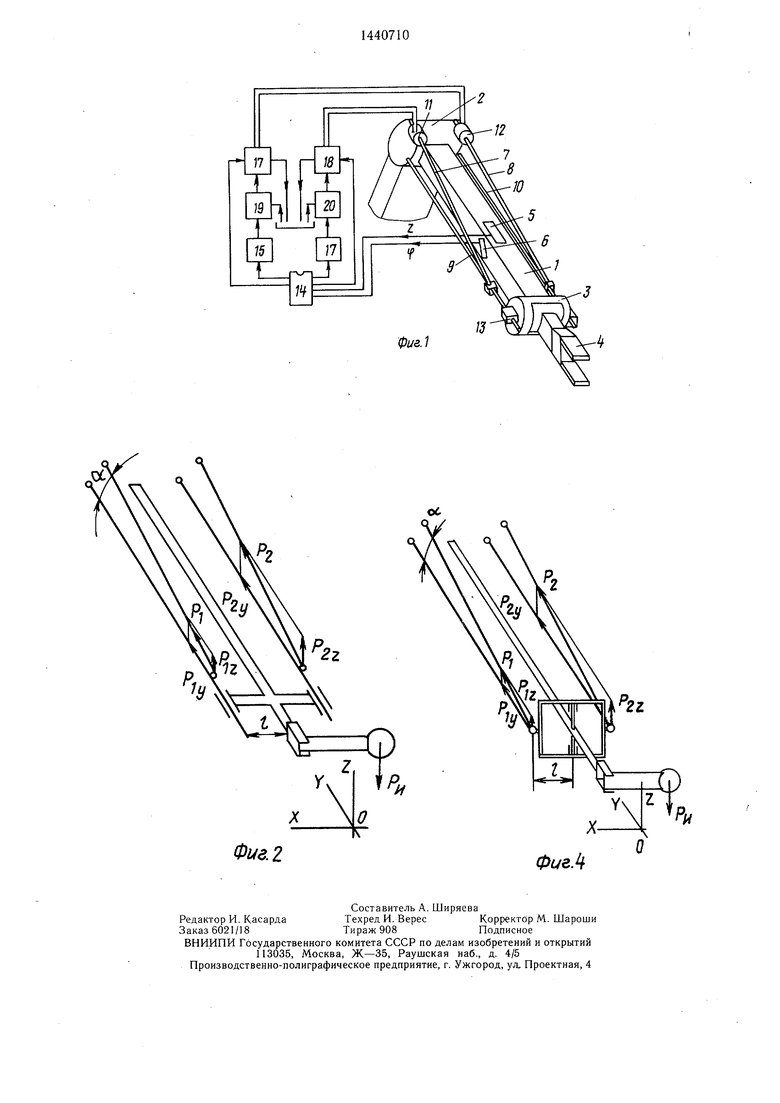
Изобретение относится к робототехнике и может быть использовано в производстве промышленных роботов повышенной точности. Целью изобретения является повь:- шение точности позиционирования за счет компенсации деформации изгиба и кручения. Это достигается тем, что промежуточный элемент 13 связывает корпус 3 захватного устройства 4 с дополнительными уравновешивающими тягами 9 и 10. Промежуточный элемент 13 может быть выполнен в виде поступательной пары или вра- ш,ательной пары, что позволяет исключить продольное сжатие стержня 1 и появление бокового изгиба, вызванного действием отли- чаюш,ихся друг от друга уравновешивающих сил Р и Р2, создаваемых приводами компенсации 11 и 12 на основных уравновешивающих тягах 7 и 8. 3 з.п.ф-лы, 4 ил.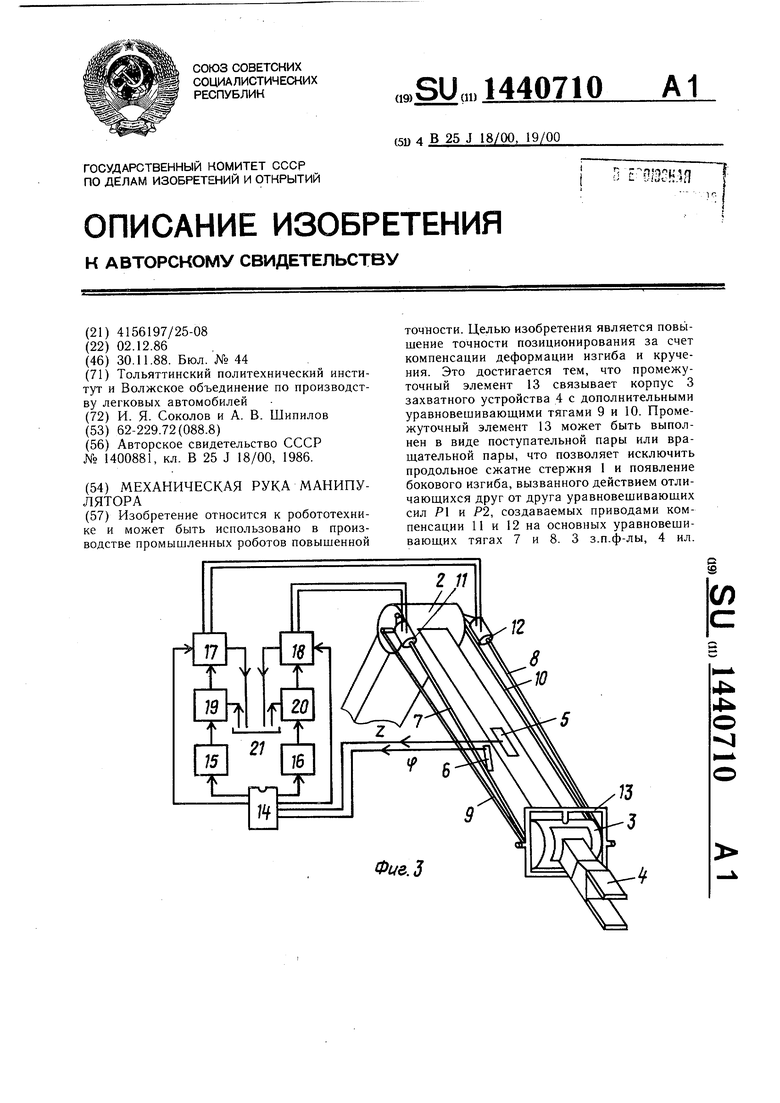
Фкг.2.
ФигМ
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
