ьа
Изобретение относится к машиностроению и может быть использовано при проектировании манипуляторов и промышленных роботов.
Цель изобретения - повышение надежности и увеличение маневренности за счет уменьшения поперечных размеров.
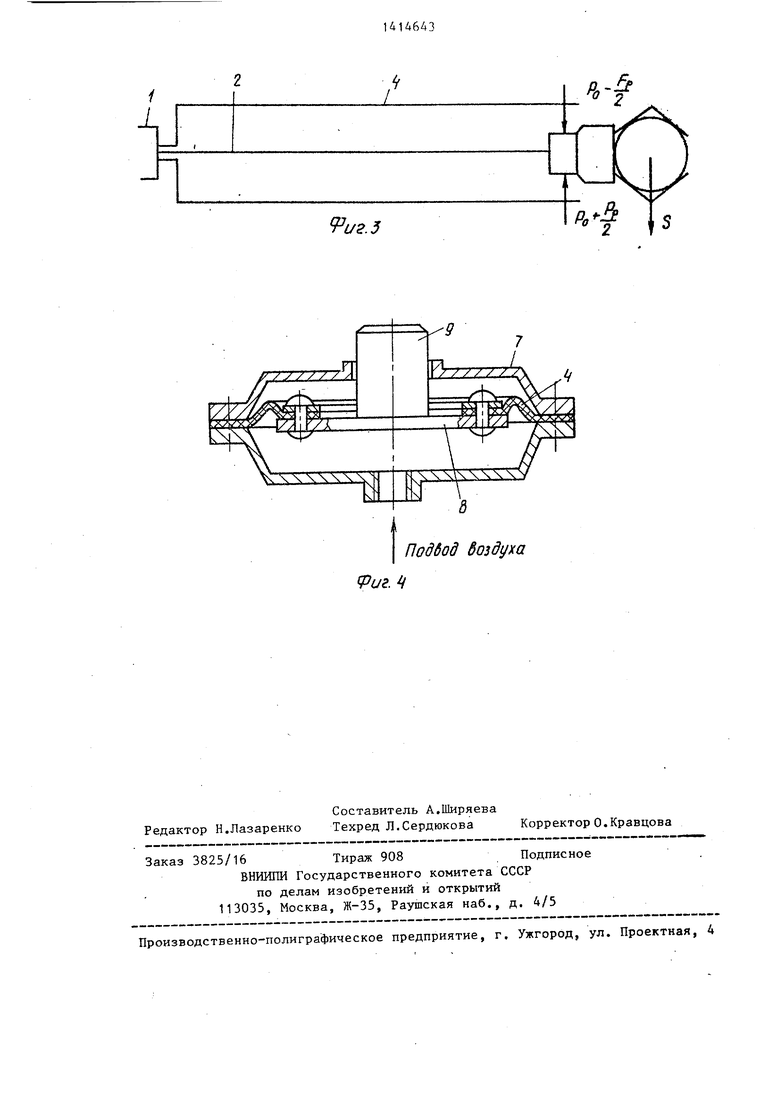
На фиг. 1 изображен промышленный робот с устройством разгрузки в ненагруженном cocтoянии на фиг. 2 - то же, находящийся под действием изгибающего момента от веса заготовки; на фиг. 3 - схема сил, действующих при разгрузке; на фиг. 4 - конструкция привода разгрузки.
Промьшшенньш робот содержит основание 1, механическую руку в виде стержня 2, закрепленного на основании, на свободном конце которого установлено захватное устройство 3, а.также устройство разгрузки в виде тонкостенной трубы 4, установленной коаксиально стержню 2, причем один конец которой закреплен на основании 1,, а другой связан со свободным концом стержня 2 посредством приводов 5 разгрузки и датчиком 6 деформаций, установленных на стержне 2.
Каждьй из приводов 5 разгрузки выполнен в виде noJioro корпуса 7, зкрепленного на внутренней стороне тонкостенной трубы 4, и пневматической диафрагмы 8 с упором 9, взаимо- действующим со свободным концом стержня 2,
Промьшшенньй робот работает сле- дуюшцм образом.
При отсутствии нагрузки на захватном устройстве 3 датчики 6 деформации выдают постоянньш сигнал, поддерживая таким образом нулевую
0
5
векторную силу усилий Р, приводов 5 разгрузки, оказываемых на стержень 2, Под действием груза G на захватном устройстве 3 или при ускорении вращения механической руки стержень 2 начинает изгибаться, что приводит к изменению сигналов датчиков 6 деформаций. В результате приводы 5 разгрузки развивают усилия, векторная сумма которых Р равна по величине и противоположна по направлению поперечной силе на захватном устройстве 3, позтому стержень 2 разгибается. При этом тонкостенная труба 4 оказывается изогнутой (фиг.2), а точное положение захватного устройства 3 сохраняется.
20 Формула изобретения
5
Промьшшенньй робот, содержащий основание, установленную на нем механическую руку в виде стержня, на свободном конце которого закреплено захватное устройство, и устройство разгрузки, включающее датчики дефор- .мации, расположенные на стержнеj и приводы разгрузки, отличающийся тем, что, с целью повышения надежности и увеличения маневренности, устройство разгрузк и снабжено ( тонкостенной трубой, расположенной коаксиально стержню, причем один его конец закреплен на основании, а другой связан со свободным концом стержня, посредством приводов разгрузки, каждьй из которых выполнен в виде полого корпуса, смонтированного на внутренней стороне тонкостенной трубы и пневматической диафрагмы с упором, установленным с возможностью взаимодействия со свободным концом стержня.
5
0
0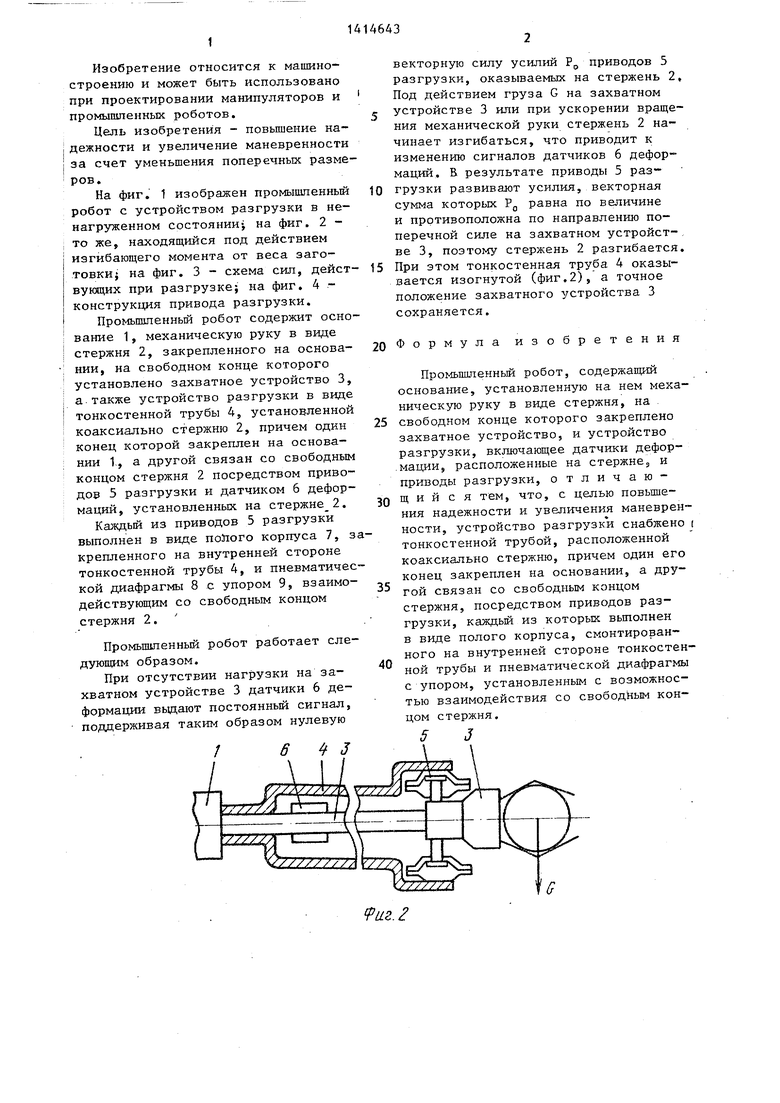
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разгрузки звена руки робота и устройство для его осуществления | 1985 |
|
SU1585150A1 |
| Разгрузочное устройство для промышленного робота | 1986 |
|
SU1313712A1 |
| Рука манипулятора | 1985 |
|
SU1585142A1 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| Устройство для разгрузки звена руки робота | 1988 |
|
SU1684035A1 |
| Промышленный робот | 1986 |
|
SU1344600A1 |
| Механическая рука манипулятора | 1986 |
|
SU1400881A1 |
| Механическая рука манипулятора | 1986 |
|
SU1440710A1 |
| Рука робота | 1986 |
|
SU1348171A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ МИНИМАЛЬНО ИНВАЗИВНЫХ ОПЕРАЦИЙ НА СЕРДЦЕ | 1997 |
|
RU2233626C2 |
Изобретение относится к области машиностроения и может быть использовано при проектировании манипуляторов и промьшшенных роботов. Целью изобретения является повышение надежности и увеличение маневренности промышленного робота за счет уменьшения поперечных размеров. Это достигается тем, что информация с датчиков деформации 6, установленных на стержне 2, передается на приводы разгрузки 5, которые развивают усилие, позволяющее удерживать захватное устроит ство 3 в недеформированном положении . 4 нл.,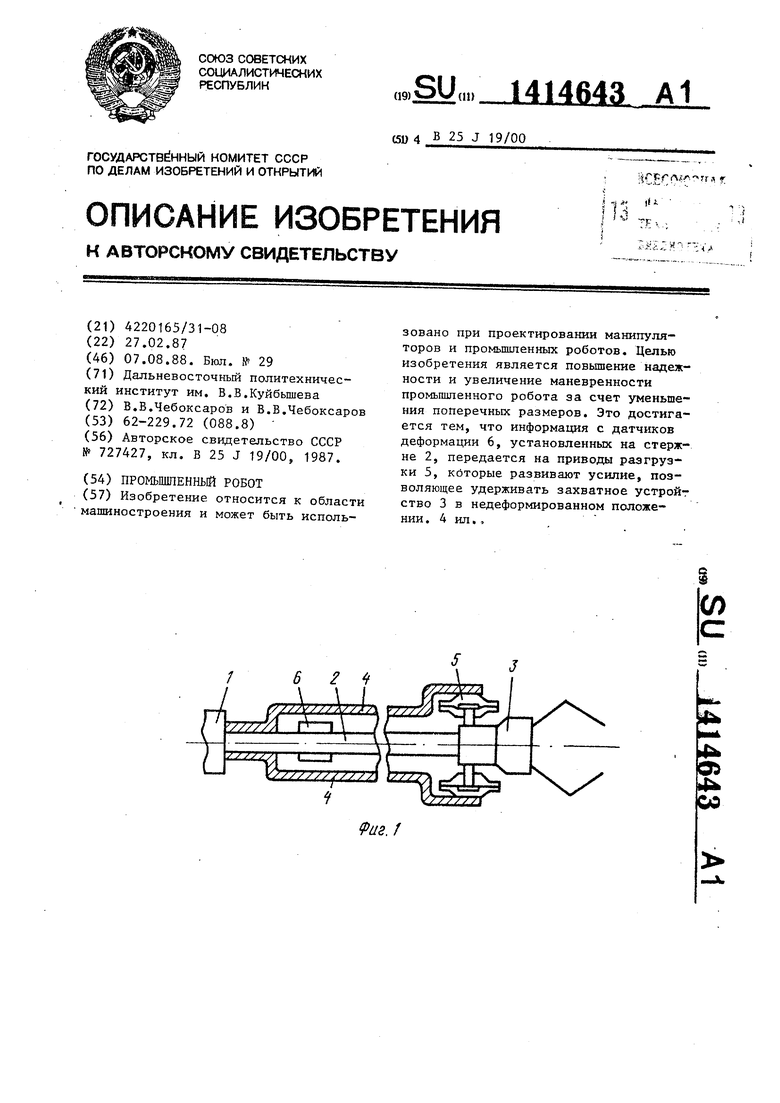
О
{лг.г
,
Vus.J
A-if
.&
ft
Подбод воздуха
(риг.
| 1978 |
|
SU727427A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
