1
Изобретение относится к средствам малой механизации и может быть использовано на скотооткормочных комплексах и фермах для погрузки, перевозки и разгрузки трупов крупного рогатого скота.
Целью изобретения является улучшение условий труда путем механизации захвата и погрузки трупов животных.
На фиг. 1 изображена тележка, общий
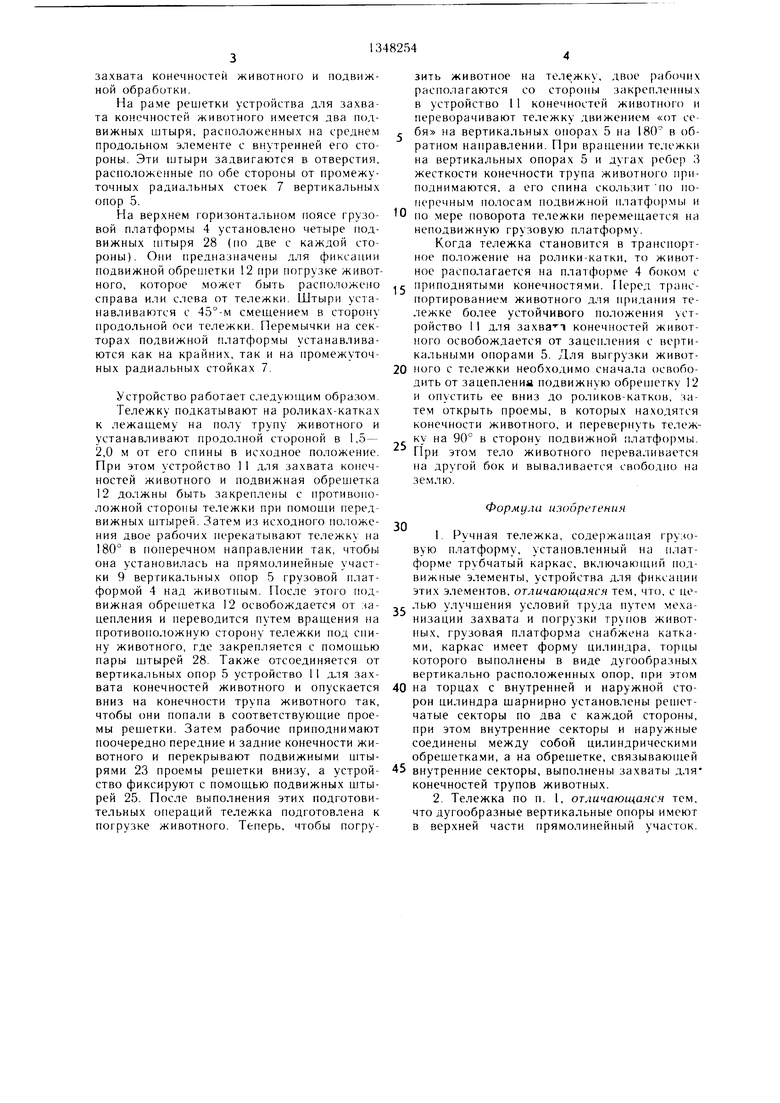
вид; на фиг. 2 то же, вид с торца; на
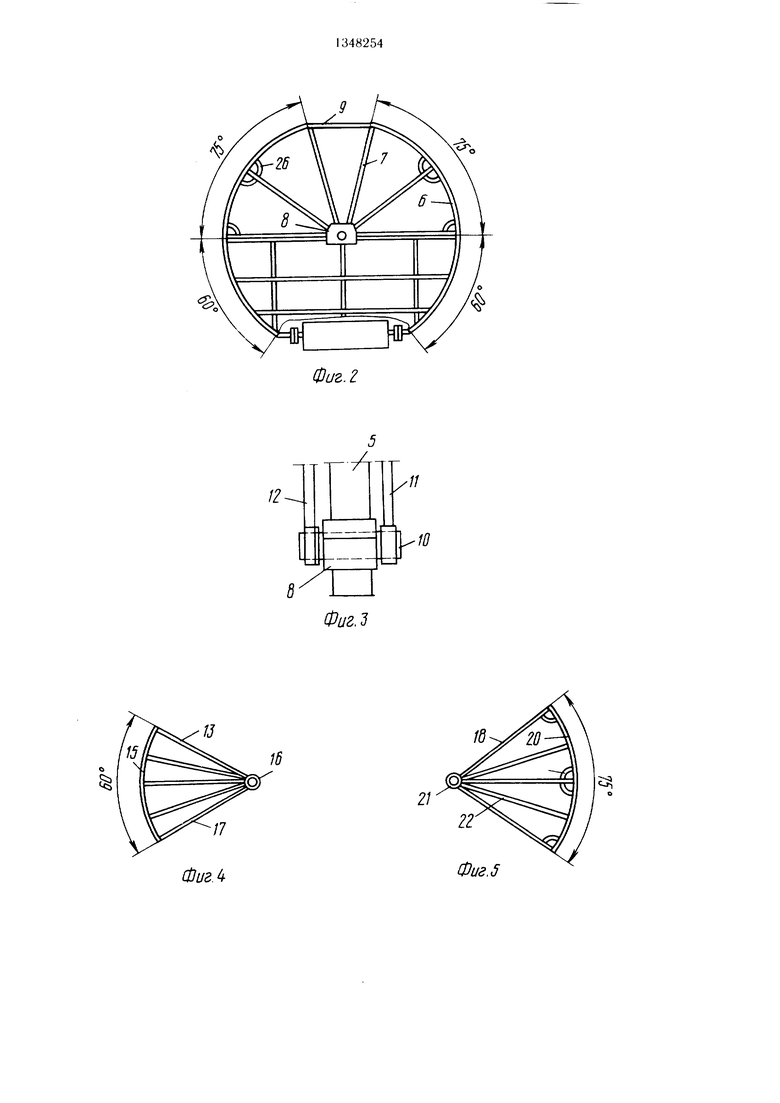
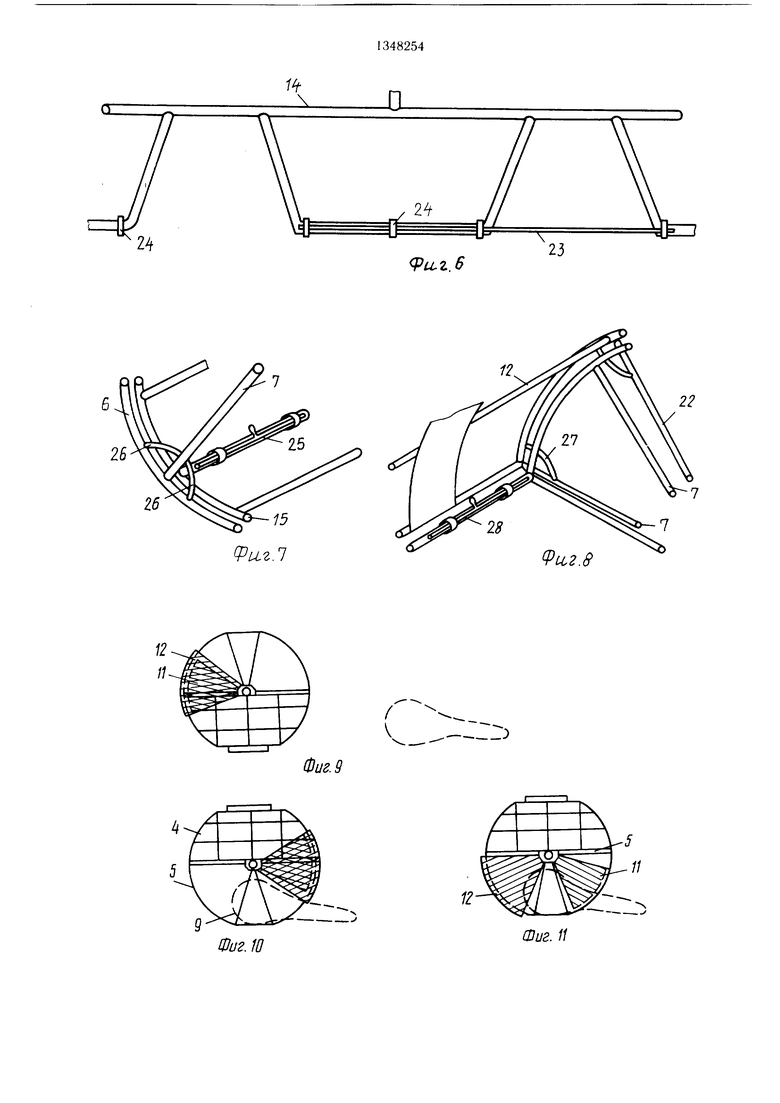
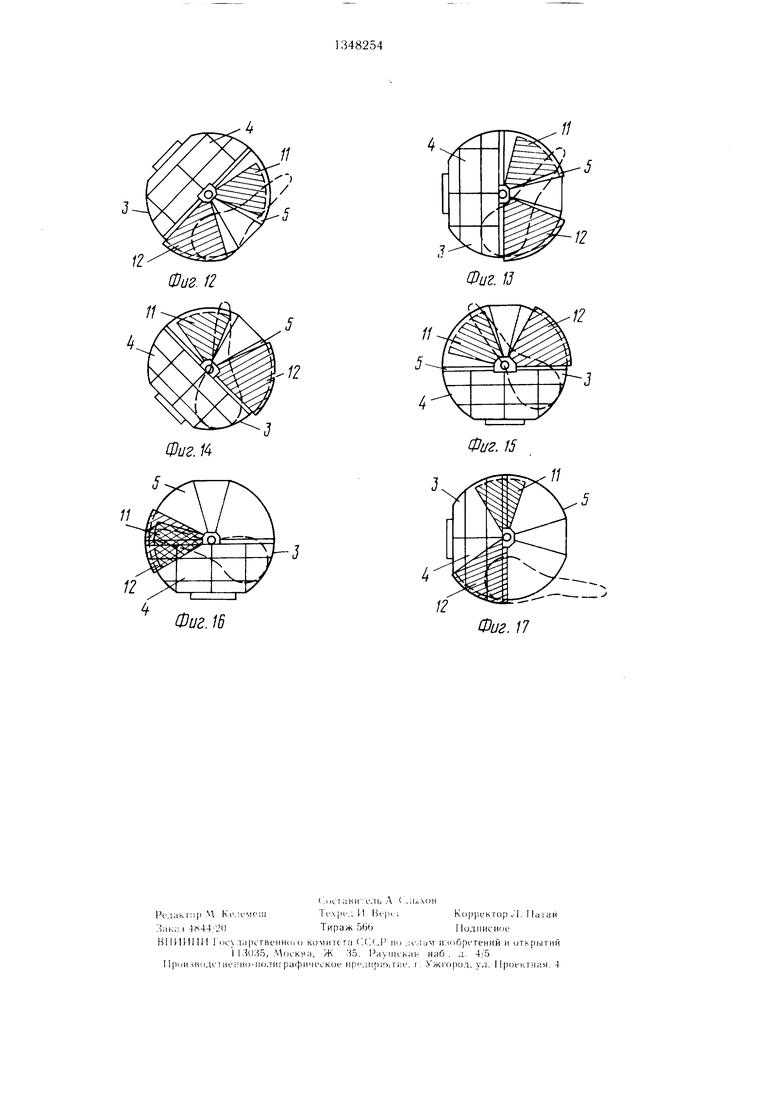
фиг. 3 - шарнирный узел крепления решетчатых секторов на торцах тележки; па фиг. 4 - внутре1 ний сектор; на фиг. 5 - наружный сектор; на фиг. 6 -- захват конечностей трупа животного на внутренней обрешетке; на фиг. 7 --- фиксатор внутреннего сектора; на (jnii. S фиксатор паружнсло сектора; на фиг. 9-17 - стадии погрузки трупа животного на тележку.
Тележка содержит трубчатый каркас, состоящий из 1Ч)ризонтальных поясов 1, вертикальных стоек 2 и дугообразных боковы.х ребер 3 жесткости. Изнутри рама покрыта эластичным материалом, в результате чего образуется корытообразная неподвижна грузовая платформа 4.
В торцах тележки на поперечинах верхнего горизонта;1ьного пояса 1 установлены две вертикальные опоры 5, состоящие из обода 6, ра1га.И)НЫх стоек 7 и ступицы 8.. На ободах 6 нве|)ху имеются прямые учасг- ки 9.
В результате сопряжения с каждой стороны тележки дуг боковых ребер 3 жесткости неподвижной грузовой платформы 4, составляющих часть длины окружности, О1 рани- ченной углом (JO , и ободов 6 вертикальных опор 5. равных длине окружности, ограниченной yiMOM 75°, поперечный профиль тележки имеет форму окружности, усеченной двумя г(физонтальными прямыми отрезками. Снизу это место установки роликов- катков, сверху прямолинейные участки 9 вертикальных опор 5. Такой профиль тележки дает возможность перекатывать ее на 180° в обе стороны в поперечном направлении и устанавливать в перевернутом положении на участке 9 вертикальных опор 5.
В ступицах 8 вертикальных опор 9 жестко закреплены горизонтальные оси 10 врап1.е- ния, выходящие равными частями на две стороны от ступицы 8. С внутренней стороны ступиц на этих осях устанавливается устройство 11 для захвата конечностей животного, а с наружной - подвижная обрешетка 12 (фиг. З ).
Устройство 11 для захвата конечностей животного состоит из двух боковых секторов 13 и соединяющей их по верху обрешетки 14. Кажаый боковой сектор имеет обод 15, втулку 16 и соединяющие их радиальные стойки 17, расходящиеся под углом 60° Втулками 16 боковые сектора 13 опираются на внутренние части осей 10 и вместе i
482542
обрешеткой 14, расг1ол0у+;е})ной параллельно продольной оси тележки, имеют возможность вращаться между вертикальными опорами 5. Длипа радиальных стоек 17 такова, что
г наружная поверхность обода 15 находится на 10-15 мм ниже внутренней поверхно- сту обода 6 вертикальных опор 5.
Рама обрешетки 14 представляет собой сочетание продольных и поперечных трубчатых элементов с трапе 1,иевидными отсеками
О и выступами, расположенными по обеим сторонам обрешетки. Отсеки предназначены для охвата конечностей животного. С каждой стороны имеется четыре отсека, что обТ)- ясняется различным положением телаживот 2 ного по отношению к тележке.
Подвижная обрешетка 12 также состоит из двух боковых секторов 18 и соединяющей их по верху обрешетки 19. Каждый боковой сектор состоит из обода 20, втулки 21 и соединяющих их радиальных стоек
20 22, расходящихся под углом 75°. Обода 20 подвижной обреп етки 12 располагаются на 20-25 мм выше ободов вертикальных опор 5 за счет бoльпJeй длины своих радиальных стоек, что позволяет вращать подвижную обрешетку 12 вокруг продольной оси над всей конструкцией тележки.
Обрешетка 19 подвижной обрешетки 12 состоит из продольных и поперечных элементов, соединенных между собой, в качестве которых используются тонкостенные ме2Q таллические трубки, а в качестве поперечных элементов - металлические полосы, которые располагаются с внутренней стороны решетки и предназначены для лучшего скольжения тела животного при опрокидывании его на подвижную обрешетку 12.
25
На обрешетке 14 устройства 11 для захвата конечностей животного каждый отсек перекрывается ограничителем 23 в виде прямого отрезка тонкостенной трубки, свободно передвигающейся в направляющих скобах
0 24, установленных на выступах решетки. На обрешетке имеется по два ограничителя с каждой стороны. Один ограничитель перекрывает одновременно всю ширину отсека и выступа, что позволяет использовать ограничитель для перекрытия двух смежных
5 отсеков.
Фиксация устройства 11 для захвата конечностей животного и подвижной обрешетки 12 Б промежуточных положениях, необходимых для погрузки и выг рузки животного, осуществляется с помощью передвигаемых
0 в направляющих скобах штырей 25. Штыри задвигаются вручную в отверстия, образующиеся в результате установки перемычек 26, 27 в углах между ободами и радиальными стойками боковых секторов вертикальс ных опор 5 и подвижной обрешетки 12. Сто- порение вращающихся частей происходит в результате пересечения штыря плоскости вра- шения боковых секторов устройства для
захвата конечностей животного и подвижной обработки.
На раме устройства для захвата конечностей животного имеется два подвижных штыря, расположенных на среднем продольном элементе с внутренней его стороны. Эти штыри задвигаются в отверстия, расположенные по обе стороны от промежуточных радиальных стоек 7 вертикальных опор 5.
На верхнем горизонтальном поясе грузо- вой платформы 4 установлено четыре подвижных П1тыря 28 (по две с каждой стороны). Они предназначены для фиксации подвижной обрешетки 12 при погрузке животного, которое может быть расположено справа или слева от тележки. Штыри устанавливаются с 45°-м смещением в сторону продольной оси тележки. Перемычки на секторах подвижной платформы устанавливаются как на крайних, так и на промежуточных радиальных стойках 7.
Устройство работает следующим образом.
Тележку подкатывают на роликах-катках к лежащему на полу трупу животного и устанавливают продолной стороной в 1,5- 2,0 м от его спины в исходное положение. При этом устройство 11 для захвата конечностей животного и подвижная обрешетка 12 должны быть закреплены с противоположной стороны тележки при помощи передвижных щтырей. Затем из исходного положе- ния двое рабочих перекатывают тележку на 180° в поперечном направлении так, чтобы она установилась на прямолинейные участки 9 вертикальных опор 5 грузовой платформой 4 над живот)1ым. После этого подвижная обре петка 12 освобождается от за- цепления и переводится путем вращения на противоположную сторону тележки под спину животного, где закрепляется с помощью пары штырей 28. Также отсоединяется от вертикальных опор 5 устройство 11 для захвата конечностей животного и опускается вниз на конечности трупа животного так, чтобы они попали в соответствуюп1,ие проемы решетки. Затем рабочие приподнимают поочередно передние и задние конечности животного и перекрывают подвижными штырями 23 проемы реп1етки внизу, а устрой- ство фиксируют с помощью подвижных штырей 25. После выполнения этих подготовительных операций тележка подготовлена к погрузке животного. Теперь, чтобы погру
зить животное на тележку, двое рабочих располагаются со стороны закрепленны.х в устройство 11 конечностей животного и переворачивают тележку движением «от себя на вертикальных опорах 5 на 80° в обратном направлении. При вращении тележки на вертикальных опорах 5 и дугах ребер 3 жесткости конечности трупа животного приподнимаются, а его спина скользит по поперечным полосам подвижной платф1)рмы и по мере поворота тележки перемещается на неподвижную грузовую платформу.
Когда тележка становится в транспортное положение на ролики-катки, то животное располагается на платформе 4 боком с приподнятыми конечностями. Перед транспортированием животного для придания тележке более устойчивого положения устройство 11 для захва конечностей животного освобождается от зацепления с вертикальными опорами 5. Для выгрузки животного с тележки необходимо сначала освободить от зацепление подвижную обрешетку 12 и опустить ее вниз до роликов-катков, затем открыть проемы, в которых находятся конечности животного, и перевернуть тележку на 90° в сторону подвижной платформы. При этом тело животного перева. 1ивается на другой бок и вываливается свободно на землю.
Формула изобретения
1.
Ручная тележка, содержащая грузовую платформу, установленный на платформе трубчатый каркас, включающий подвижные элементы, устройства для фиксации этих элементов, отличающаяся тем, что, с целью улучщения условий труда путем механизации захвата и погрузки трупов животных, грузовая платформа снабжена катками, каркас имеет форму цилиндра, торцы которого выполнены в виде дугообразных вертикально расположенных опор, при этом на торцах с внутренней и наружной сторон цилиндра щарнирно установлены решетчатые секторы по два с каждой стороны, при этом внутренние секторы и наружные соединены между собой цилиндрическими обрешетками, а на обрешетке, связывающей внутренние секторы, выполнены захваты для- конечностей трупов животных.
2. Тележка по п. 1, отличающаяся тем, что дугообразные вертикальные опоры имеют в верхней части прямолинейный участок.
Фиг. г
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| ПОДЪЕМНИК | 2004 |
|
RU2305061C2 |
| Тележка для транспортировки и монтажа секций крепи | 1990 |
|
SU1798516A1 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ, ТРАНСПОРТИРОВКИ И УКЛАДКИ ЭЛЕМЕНТОВ ВЕРХНЕГО СТРОЕНИЯ ПУТИ | 1990 |
|
RU2028406C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ СУПЕРКОНТЕЙНЕРОВ С РАЗРЯДНЫМИ И ЭКОЛОГИЧЕСКИ ОПАСНЫМИ ГРУЗАМИ | 2013 |
|
RU2550940C1 |
| ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2593181C1 |
| Мобильный козловой кран | 2021 |
|
RU2765227C1 |
| Платформа для погрузки-разгрузки транспортных средств автопогрузчиком | 1981 |
|
SU1020334A1 |
Изобретение относится к с|)едствам малой .механизации и может быть использовано на скотооткормочных комплексах и фермах для но1 рузкн, неревозкн и разгрузки трупов круиного рогатого скота. Цель изобретения улучшение условий труда путем механизации захвата и но1 рузки трунов животных. Тележка содержит трубчатый каркас цилиндрической формы, грузовая платформа изнутри нокрыта эластичным материалом. Тележка снабжена po.iH- ками-катками. На торцах тележки nona|ino установлены шарнирно ре1нетчатые секторы с наружной и внут)енней сторон. Секторы соединены обрешетками, нрн этом на внутрен- )1ей ()бреп1етке выно.чнены захваты для конечностей трупов животных. 1 3. н. ф-лы, 17 ил. 72 (Л оо 4:: 00 Ю СП 4 П г 5
16
Фиг.,5
/
2
Ри,г.6
23
2В
Z6
12
(Ри.2.е
Фиг. Ю
Фиг. 11
11
Фиг. 12
Фиг. 14
Фиг. 15
Фиг. 16
Фиг. 17
| Патент США № 4052080 кл | |||
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ГЛИНОЗЕМА И ЕГО СОЛЕЙ ИЗ СИЛИКАТОВ ГЛИНОЗЕМА, ПРОСТЫХ ГЛИН И. Т.П. | 1915 |
|
SU280A1 |
