И:«л )ретеиио относится к подъемно-транспортному ман1ипостроеник). а именно к вибрационным конвейерам, и является лЮпол- ните.мьным к авт. св. Л 1033393.
LU .ibK) изоГфетения является рас1нире- ние техноло ически.х возможностей кон- вейе за счет )егу:1ирования траектории движения |)аб()чего органа но его длине.
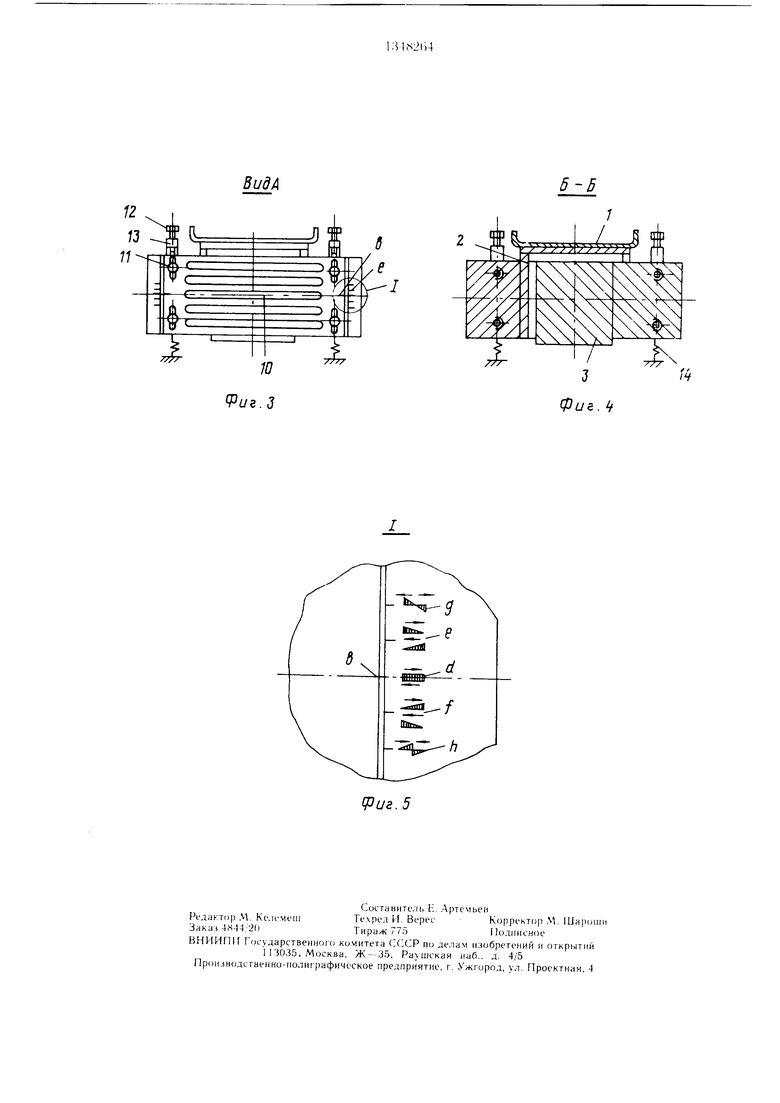
На фиг. 1 изображен вибрационный конвейер, общий нид; на фиг. 2 - то же, вид сверху; на фнс. ii вид .Л на фи1 . 1; на ())иг. 4 разрез Б-Гз на фиг. 1; на фиг. 5 - элемент 1 на фиг. 3.
Вибрационные конвейер содержит рабочий opi BH 1 в виде лотка, закренленною на каркасе 2. реактивную массу 3, на которой закрен.тены два э.лектромагнита 4 и 5 виГ)р()11рив();1.а ч ризонтальных ко.чебаний и :1лектрома1 нита 6 вибронривода вертикаль ньгх Ko;ie6aHMii. Якорь 7 вибронривода вер- .икальных колебаний и якори 8 и 9 вибро- нрчвода го)изонтальных ко.чебаний закреплены на каркасе 2 рабочего органа 1.
Основная систе.ма, соединяющая реактивную массу 3 и рабочий орган , 1и 1нолнена в виде двух плоских нружин 10 с 11родолы1Ь1ми вырезами, образующими |)ен1етки, элементы которых имеют црямо- угольное сечение, нри этом грани элементов расно.южены параллельно направлениям продольных и нормальиы.Х колебаний. Пружины И) и месга.х их крепления снабжены пазами П, допускающими перемещение прчжин К) относительно реактивной массы 3 и рабочек органа I в вертикальном на- нранлении 1И)д действием ме.ханизма пере- менк ния и ((шксации, выполненного в данном случае в виде винта 12, установленного в Неподвижно гайке 13. На конца.х каждой пружины К) вдо.1ь ее центральной продольной оси нанесет.) две метки в, определяющие но. южение центра жесткости упругой системы. На рабочем органе 1 и реактивной массе 3 нанесены метки h, f, d, 1 и g, задающие определенный технологический режим работы конвейера. Их положение опре- де,1яется расчетным путем или экснеримсн- тально. Виброконвейер установлен на амортизаторах 14.
В|1брацио1 ный конвейер работает сле- дукмцим образ(м.
0
При подаче пульсирующего напряжения на электромашиты 4, 5 и 6 со сдвиго.м фаз между ними возникают эллиптические колебания рабочег о органа и осуществляется транспортирование изделий по лотку рабо- че1 о орг ана 1.
При определенном положении центра жесткости Q относительно центров масс рабочего органа и реактивной массы Oj и Oj, которое достигается совмещением меток в и d (фиг. 5), амплитуда вертикальны.х колебаний рабочего органа одинаковая по всей его длине и, следовательно, одинаковой является и скорость транспортирования по всей длине лотка. При отклонении положе5 ния центра жесткости Q от указанного положения амплитуда вертикальны.х колебаний рабочего органа станет неодинаковой по его длине, чем достигается разгон изделий в процессе транспортирования (совмещение меток я с метками f), торможение изделий с остановкой их на конце лотка (совме- нгение меток в с метками с), транспортирование изделий от середины лотка к его концам (совмещение меток в с метками g) или от концов лотка к его середине (совмеще5 ние меток в с метками h). Два последних эффекта имеют место при выключенном виброприводе вертикальных колебаний.
Возможность изменения скорости транспортирования по . ютку существенно расширяет те.хнологические воз.можности кон0
0
5
0
5
вейера в робототехнически.х комплекса.х. Формула изобретения
. Вибрационный конвейер по авт. св. № 1033393, отличающийся тем, что, с целью расширения технологических возможностей конвейера за счет регулирования траектории движения рабочего органа по его длине, плоские пружины установлены с возможностью перемещения и фиксации относительно реактивной массы и рабочего органа в вертикальном направлении посредством механизма перемещения.
2. Конвейер по п. 1, отличающийся тем, что на плоских пружинах, рабочем органе и реактивной массе нанесены метки отклонения положения центров масс от центра жесткости упругой системы.
ЮВидА
5-Б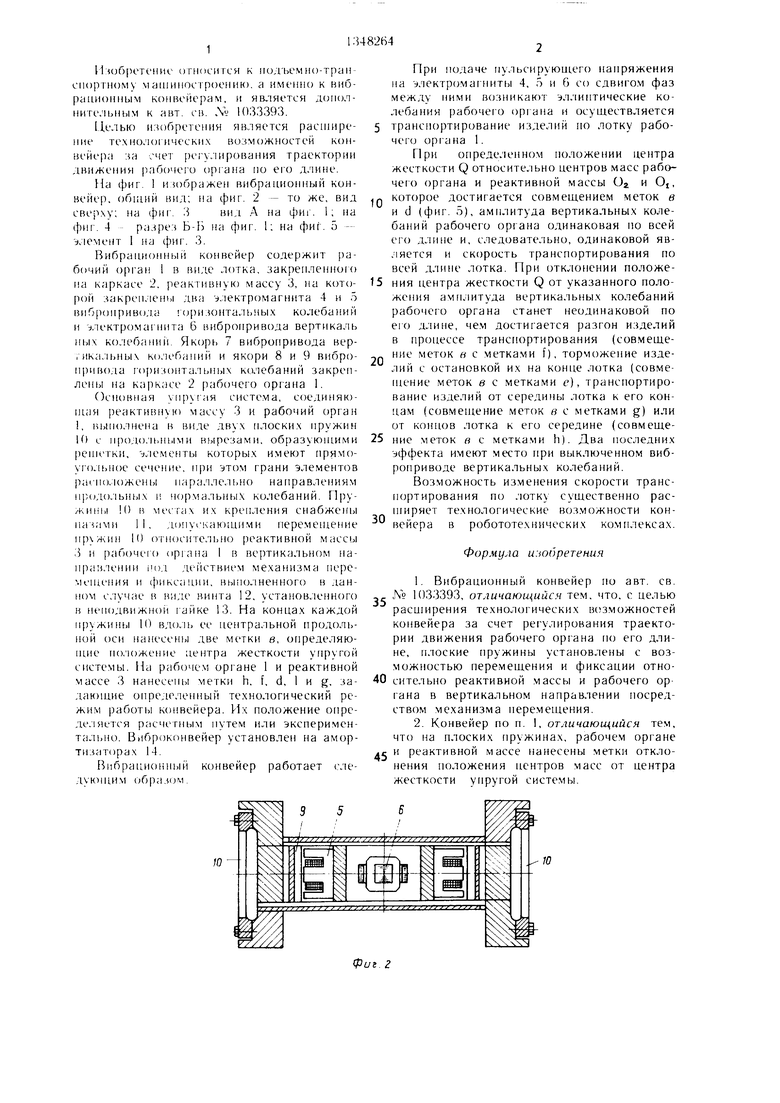
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный конвейер | 1982 |
|
SU1033393A1 |
| Вибропитатель | 1971 |
|
SU493410A1 |
| Вибрационный конвейер | 1987 |
|
SU1433882A1 |
| Вибрационный лоток | 1978 |
|
SU685582A1 |
| Вибрационный конвейер | 1988 |
|
SU1549874A1 |
| Двухмассный вибрационный конвейер | 1984 |
|
SU1219488A1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1967 |
|
SU195365A1 |
| ВИБРАЦИОННЫЙ ЛОТОК | 1968 |
|
SU213673A1 |
| СПОСОБ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ ДИСПЕРСНЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ВИБРАЦИОННОГО ПИТАТЕЛЯ | 2000 |
|
RU2187450C2 |
| ВИБРАЦИОННЫЙ ЛОТОК-ТРАНСПОРТЕР | 1967 |
|
SU205679A1 |
Изобретение относится к нольемнг)- транспортному ман иностроению и paciiHi- ряет технологические возможности конвейера за счет регулирования траектории движения рабочего органа. Конвейер включает унругую систему. соединяюн1ую реактивную массу (РМ) 3 и рабочий орган (РО) I и выполненную в виде двух плоских пружин (ПП) с продо. 1ЬН1 1ми вырезами. При :1гом ПП установлены с возможностью перемещения и фиксании отгюсительно РЛ 3 и Р() 1 в вертикальном направлении нос)ед- ством механизма перемещения, выно.чнен- Hf)io в виде винта 12. установлешюго в не- 1одвижной :айке. Па ПП PC) 1 и РМ 3 нанесете .метки отклонения ,-|оже1 ия центров масс от центра жесткости т1ругой системы. При совпадении цент)а жесткости с центром масе амплитуда ко,1еба1)ИЙ Р() 1 одинакова но всей его длине и одинакова скорость транспортировании. При отк.юне- НИИ центра жесткости от neinpa масс амц- колеба11ий неодинакова ио ein длине и CKc.ipocTij транспортирования изде.чий не 1еменна. I з.п. ф-лы, 5 и,1. U5 (Л Фи&. 1 СО 4; 00 N3 о: 4 ISJ
(риг. 5
