11
Изобретение относится к горной пpo fьшшeннocти и может быть использовано в устройствах для бурения шпуров.
Цель изобретения - повьщ1ение надежности и упрощение конструкции.
На чертеже показана кинематическая схема манипулятора.
Буровой манипулятор включает стрелу 1, основание 2, оголовок 3, щарнирно соединенные между собой, продольную 4, поперечную 5 тягу и гидроцилиндр, корпус 6 которого шарнирно соединен с основанием 2, а шток 7 - шарнирно со стрелой 1. На конце продольной тяги 4 установлен ролик 8, который соприкасается с криволинейной поверхностью основания 2 под воздействием упру- гого элемента 9. Другим концом продольная тяга 4 шарнрфно связана с позуном 10, установленным на оголовке 3. Поперечная тяга 5 одним концом закреплена на стреле 1, а другим шар нирно соединена с дополнительным ползуном 1 1 .
Упругий элемент 9 одним концом закреплен на тяге 4, а другим - на дополнительном ползуне 11. В верхней части оголовка 3 установлена бурильная машина (показано условно). Криволинейная поверхность основания 2 выполнена по функциональной зависимости таким образом, что при подъеме и опускании стрелы 1 оголовок 3 остается паралелльным первоначальному положению.
Буровой манипулятор работает следующим образом.
При прямом ходе штока 7 гидроцилиндра стрела 1 поднимается, ролик 8 обкатывается по криволинейной поверхности основания 2, продольная тяга 4 прижимается через ролик 8 к кри- волинейной поверхности основания 2 под воздействием упругого элемента 9 и перемещается относительно дополнительного ползуна 11 в сторону оголовка 3, ползун 10 перемещается от- носительно оголовка 3, происходит опускание оголовка 3 относительно стрелы 1 на тот же угол, на какой стрела 1 поднимается относительно горизонтальной плоскости. При обрат- ном ходе штока 7 гидроцилиндра стре ла 1 опускается, продольная тяга 4 перемещается относительно дополнительного ползуна 11 в сторону осно112
вания 2 под воздействием упругого элемента 9, ролик 8 обкатывается по криволинейной поверхности основания 2, происходит подъем оголовка 3 относительно стрелы 1 на тот же угол, на какой стрела 1 опускается относительно горизонтальной плоскости.
Конструкция при подъеме и опускании стрелы не испытывает дополнительные нагрузки и деформации, возникающие в замкнутом контуре за счет избыточных связей, так как во внешнем контуре, образуемом основанием 2, стрелой 1, оголовком 3, ползуном 10, продольной тягой 4 и роликом 8, и во внутреннем контуре, образуемом стрелой 1, поперечной тягой 5, дополнительными ползунами 11, тягой 4, избыточные связи устранены посредством шарнирного соединения продольной тяги 4 с ползуном 10, установленным на оголовке 3, посредством высшей кинематической пары, образуемой контактом ролика 8 с криволинейной поверхностью основания 2 под воздействием гибкой связи - упругого элемента 9 и посредством шарнирных соединений поперечных тяг 5 с ползунами 11 со стрелой 1.
Тяга 4 имеет возможность самоустанавливаться под воздействием сил упругости в процессе деформации конструкции как при подъеме и опускании стрелы, так и при бурении, что позволяет компенсировать погрешности изготовления деталей конструкции. Приведенное выше конструктивное исполнение контуров дает возможность уменьшить поперечную деформацию тяги 4 и разгрузить тягу от вертикальной составляющей нагрузки, возникающей при бурении.
Формула изобретения
Буровой манипулятор, включающий неподвижное основание, стрелу, щар- нирно соединенную с основанием и оголовком, гидроцилиндр, шарнирно со- . единенный с основанием и стрелой,продольную и поперечную тяги и ползун, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, он снабжен дополнительным ползуном, размещенным на продольной тяге, а неподвижное основание выполнено с участком криволинейной поверхности, при этом продольная тяга выполнена с подпружиненным
31348511
со стороны оголовка роликом, разме- нирно соединен с ползуном, установ- щенньгм на одном ее конце с возмож- ленным на оголовке, причем попереч- ностью взаимодействия с участком ная тяга одним концом жестко соеди- криволинейной поверхности основания, нена со стрелой, а другим шарнирно а другой конец продольной тяги шар- соединена с дополнительным ползуном.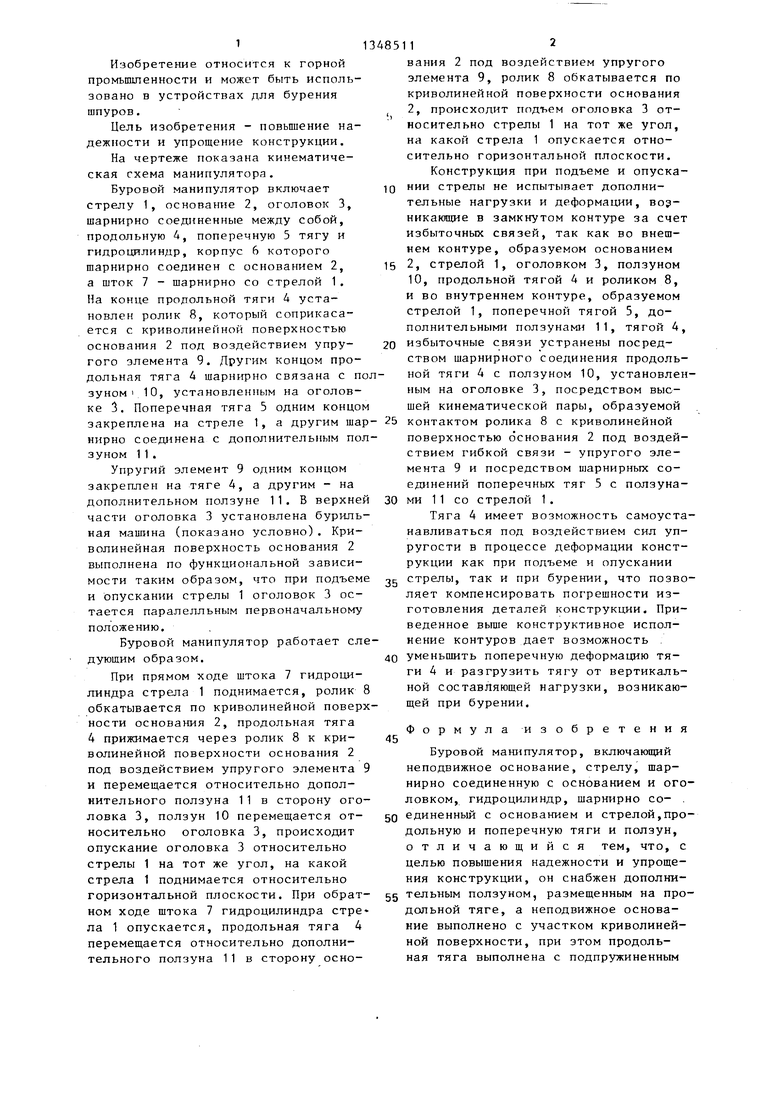
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровой манипулятор | 1984 |
|
SU1170135A1 |
| Буровой манипулятор | 1986 |
|
SU1430518A1 |
| Буровой манипулятор | 1985 |
|
SU1270318A1 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| Экскаватор | 1989 |
|
SU1726667A1 |
| КРАН-МАНИПУЛЯТОР (ВАРИАНТЫ) | 2013 |
|
RU2547100C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Кран-манипулятор | 1978 |
|
SU933622A1 |
| Буровой манипулятор | 1988 |
|
SU1578327A1 |
| ИЗВЛЕКАТЕЛЬ ФУНДАМЕНТОВ ИЗ ГРУНТА | 1999 |
|
RU2170302C2 |
Изобретение относится к горной пром-ти и м.б. использовано в устройствах для бурения шпуров. Цель изобретения - повышение надежности и упрощение конструкции. Манипулятор включает неподвижное основание (НО) 2, стропу 1, продольную 4 и поперечную 5 тяги. Стрела 1 шарнирно соединена с НО 2 и оголовком 3, а гидроцилиндр - с НО 2 и стрелой 1. Тяга 5 на одном конце имеет подпружиненный со стороны оголовка ролик 8. Другой ее конец шарнирно-соединен с ползуном (П) 10, установленным на оголовке 3. На тяге 4 размещен дополнительный П 11. Один конец тяги 5 соединен со стрелой 1, а другой шарнирно - с П 11. При прямом ходе штока 7 гидроцилиндра стрела 1 поднимается, тяга 4 прижимается через ролик 8 к криволинейной поверхности НО 2 и перемещается к оголовку 3. Он опускается относительно стрелы 1. При обратном ходе штока 7 стрела 1 опускается, а оголовок 3 поднимается. В итоге конструкция не. испытывает дополнительных нагрузок и деформаций за счет устранения избыточных связей. Тяга 4 может в процессе работы самоустанавливаться, что компенсирует погрешности в изготовлении деталей. 1 ил. сл о: 4 00 ел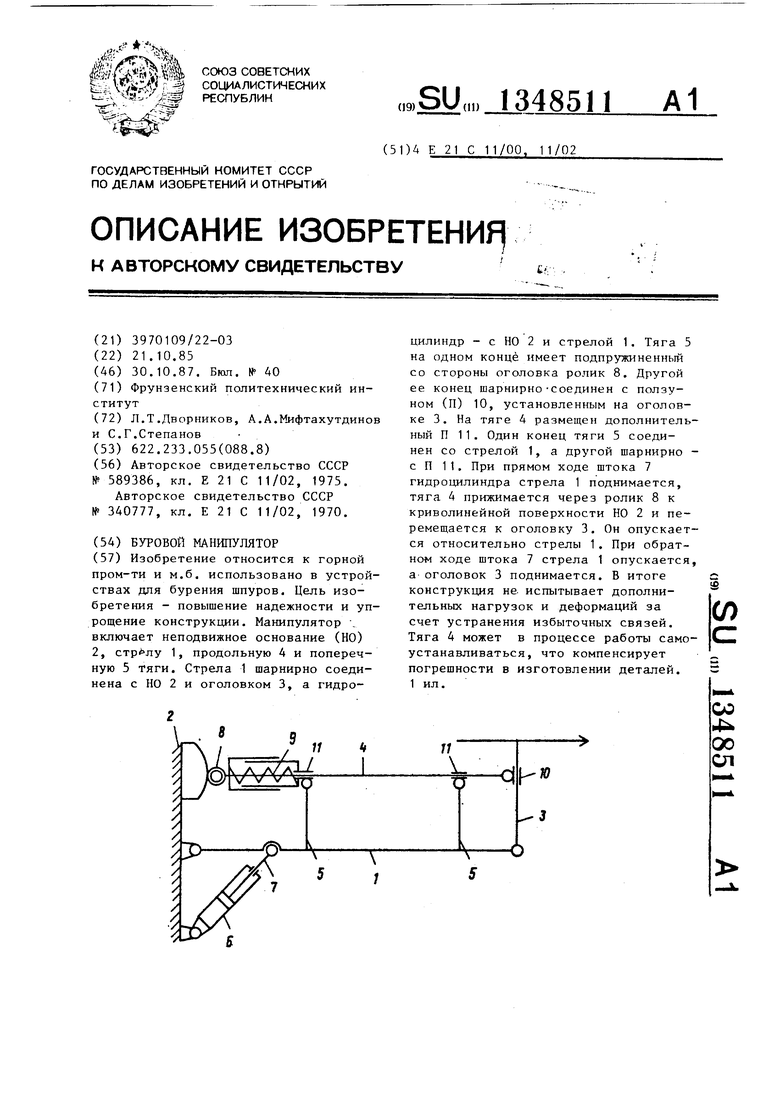

| Буровая стрела | 1975 |
|
SU589386A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| БУРОВАЯ ГИДРАВЛИЧЕСКАЯ СТРЕЛА | 0 |
|
SU340777A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
