(54) КРАН-МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1980 |
|
SU922048A1 |
| Кран-манипулятор | 1976 |
|
SU614015A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНАВСЕСОЮЗНАЯnATEHTHO-TEXH^^iECri^r | 1970 |
|
SU282800A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Подъемный стреловой кран | 1959 |
|
SU125657A1 |
| ПОЖАРНЫЙ ГИДРОПОДЪЕМНИК | 1972 |
|
SU421330A1 |
| КРАН-МАНИПУЛЯТОР (ВАРИАНТЫ) | 2013 |
|
RU2547100C1 |
| Компактный подъемный механизм "Богатырь" и способ его монтажа | 2016 |
|
RU2618853C1 |
| Консольный кран | 1980 |
|
SU954360A1 |
1
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам, предназначенным для выполнения монтажных, погрузочно-разгрузочных, сборочных и других операций.
Известен кран-манипулятор, содержащий колонну с оголовком, имеющим горизонтальные и вертикальные направляющие, стрелу, выполненную из шарнирно-. сочлененных звеньев, снабженных опорными катками, установленными с возможностью перемещения в упомянутых направляющих, и механизм подъема груза, содержащий винт и гайку 1.
Известным краном трудно выполнить точное манипулирование грузом, так как подъем и опускание груза производится только механизмом подъема, имеющим определенную инерцию.
Цель изобретения - повыщение точности установки груза.
Указанная цель достигается тем, что оголовок колонны снабжен щарнирно закрепленными на нем упругими элементами с тягами, соединенными с опорным катком, установленным в вертикальных направляющих, причем этот каток снабжен жестко прикрепленной к нему цапфой, а гайка механизма подъема груза подпружинена относительно упомянутой цапфы и соединена с ней посредством управляемых гидроцилиндров.
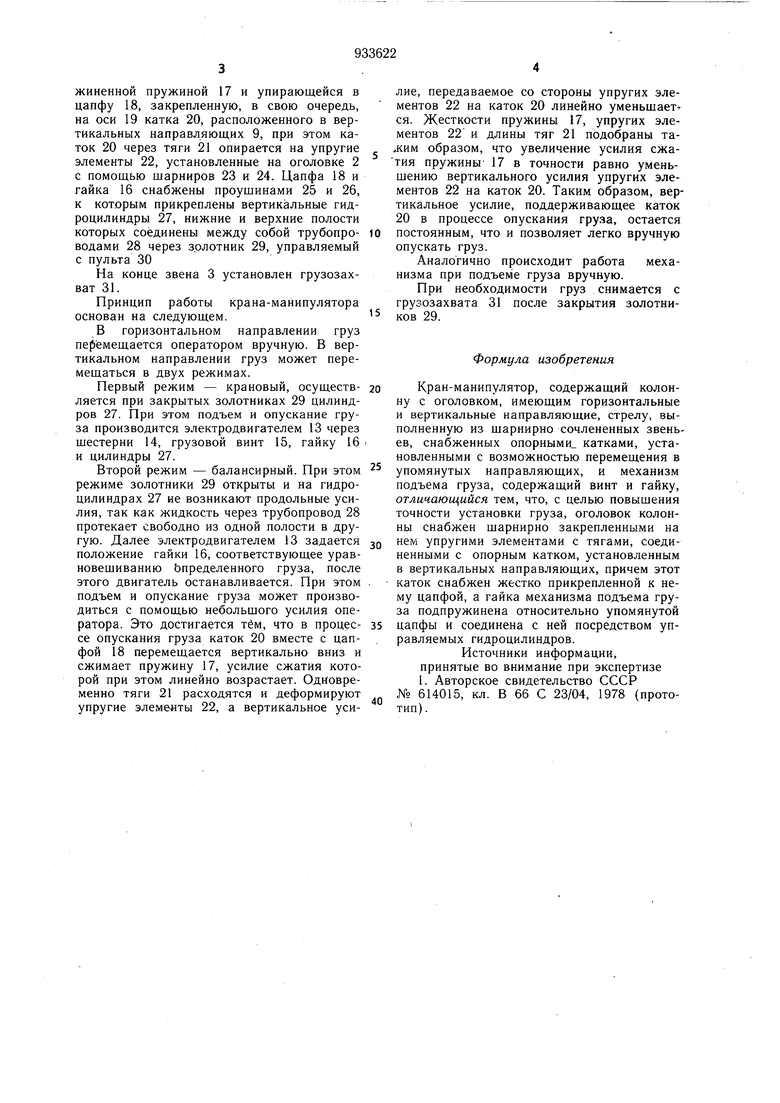
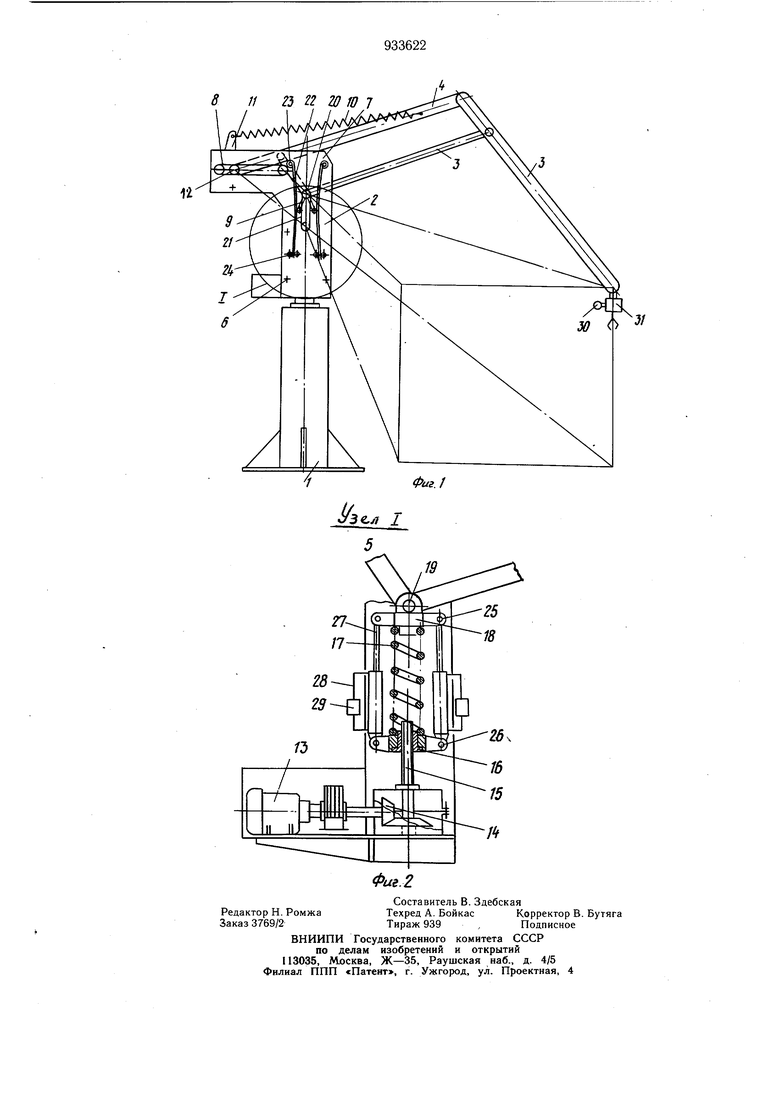
На фиг. 1 показан кран-манипулятор, общий вид; на фиг. .2 - узел I на фиг. 1; Кран-манип улятор состоит из стационарно установленной колонны 1, в верхней
10 части которой расположен оголовок 2 со стрелой, выполненной из щарнирно сочлененных звеньев 3-5. Оголовок 2 выполнен . в виде двух соединенных между собой болтами 6 боковых щек 7, в которых имеются горизонтальные 8 и вертикальные 9 направляющие.
С целью частичного уравновешивания сил тяжести стрелы звено 4 при помощи пружины 10 соединено с расположенным на оголовке 2 кронщтейном 11. Последний
20 шарнирно связан с катком 12, установленным в горизонтальных направляющих 8. Механизм подъема груза состоит из электродвигателя 13, пары конических шестерен 14, грузового винта 15, гайки 16, подпружиненной пружиной 17 и упирающейся в цапфу 18, закрепленную, в свою очередь, на оси 19 катка 20, расположенного в вертикальных направляющих 9, при этом каток 20 через тяги 21 опирается на упругие элементы 22, установленные на оголовке 2 с помощью щарниров 23 и 24. Цапфа 18 и гайка 16 снабжены проущинами 25 и 26, к которым прикреплены вертикальные гидроцилиндры 27, нижние и верхние полости которых соединены между собой трубопроводами 28 через золотник 29, управляемый с пульта 30
На конце звена 3 установлен грузозахват 31.
Принцип работы крана-манипулятора основан на следующем.
В горизонтальном направлении груз пе|)емещается оператором вручную. В вертикальном направлении груз может перемещаться в двух режимах.
Первый режим - крановый, осуществляется при закрытых золотниках 29 цилиндров 27. При этом подъем и опускание груза производится электродвигателем 13 через шестерни 14, грузовой винт 15, гайку 16 и цилиндры 27.
Второй режим - балансирный. При этом режиме золотники 29 открыты и на гидроцилиндрах 27 не возникают продольные усилия, так как жидкость через трубопровод 28 протекает свободно из одной полости в другую. Далее электродвигателем 13 задается положение гайки 16, соответствующее уравновешиванию Ьпределенного груза, после этого двигатель останавливается. При этом подъем и опускание груза может производиться с помощью небольшого усилия оператора. Это достигается тем, что в процессе опускания груза каток 20 вместе с цапфой 18 перемещается вертикально вниз и сжимает пружину 17, усилие сжатия которой при этом линейно возрастает. Одновременно тяги 21 расходятся и деформируют упругие элементы 22, а вертикальное усилие, передаваемое со стороны упругих элементов 22 на каток 20 линейно уменьшает ся. Жесткости пружины 17, упругих элементов 22 и длины тяг 21 подобраны та.ким образом, что увеличение усилия сжатия пружины 17 в точности равно уменьшению вертикального усилия упругих элементов 22 на каток 20. Таким образом, вертикальное усилие, поддерживающее каток 20 в процессе опускания груза, остается постоянным, что и позволяет легко вручную опускать груз.
Аналогично происходит работа механизма при подъеме груза вручную.
При необходимости груз снимается с грузозахвата 31 после закрытия золотников 29.
Формула изобретения
Кран-манипулятор, содержащий колонну с оголовком, имеющим горизонтальные и вертикальные направляющие, стрелу, выполненную из щарнирно сочлененных звеньев, снабженных опорными, катками, установленными с возможностью перемещения в упомянутых направляющих, и механизм подъема груза, содержащий винт и гайку, отличающийся тем, что, с целью повышения точности установки груза, оголовок колонны снабжен шарнирно закрепленными на нем упругими элементами с тягами, соединенными с опорным катком, установленным в вертикальных направляющих, причем этот каток снабжен жестко прикрепленной к нему цапфой, а гайка механизма подъема груза подпружинена относительно упомянутой цапфы и соединена с ней посредством управляемых гидроцилиндров.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 614015, кл. В 66 С 23/04, 1978 (прототип).
