Изобретение относится к горной промьшшенности и может быть использовано в устройстве .цля бурения шпуров
Цель изобретения - повышение на- дежности работы манипулятора за счет уменьшения поперечной деформации тяги в процессе самоустановки последней при силовом нагружении конструкции.
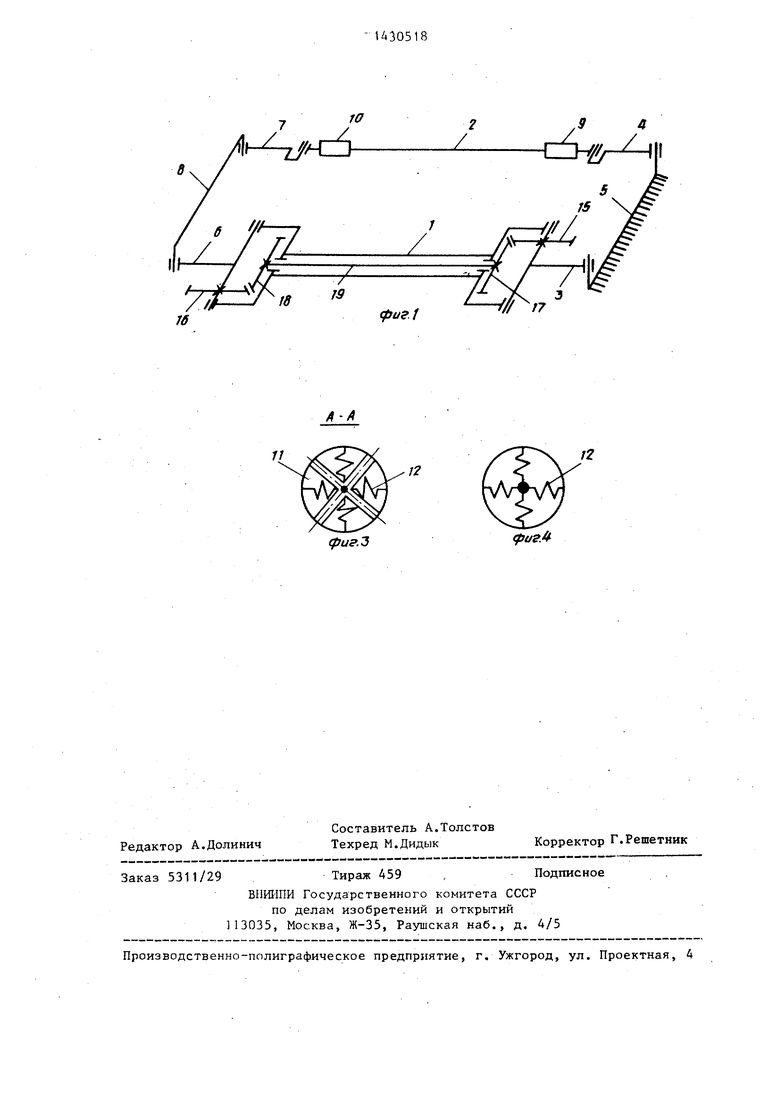
На фиг. 1 представлена структурная схема бурового манипулятора; на фиг. 2 - цилиндры и поршни (поршни выполнены в виде секторов со сферическими поверхностями, продольный разрез; на фиг. 3 -разрез А-А на фиг. 2; на фиг. 4 - поршень, поперечный разрез.
Буровой манипулятор включает стрелу 1, тягу 2, соединенные посредством шарниров 3 и 4 с основанием 5, а шарнирами 6 и 7 - с оголовком 8. Тяга 2 соединена с шарнирами 4 и 7 через цилиндры 9 и 10, в которых установлены сектора 11, соединенные с тягой 2 упругими элементами 12. Сектора 11 установлены с зазором относительно друг друга и с возможностью перемещения относительно н аправляющих пластин 13 (на фиг. 3 и фиг. 4 условно не показаны), которые жестко соединены с тярой 2. Поверхности секторов 11, кон.тактируюш;ие с цилиндрами 9 и 10, выполнены сферическими с радиусом R 0,5 D, где D - диаметр цилинд-. ;ров. Сектора 11, упругие элементы 12 :и направляющие пластины 13 образуют в совокупности полые поршни, продоль- ное смещение которых в цилиндах огра- ;ничено упругими элементами 14. С шар нирами 3 и 6 жестко соединены конические зубчатые колеса 15 и 16, находящиеся в зацеплении с колесами 17 и 18, которые жестко -установлены-на валу 19. Подъем и поворот стрелы 1 производится гидроцилиндрами (на фиг. 1.не показаны). В передней части оголовка 8 установлена бурильная машина (на фиг. 1 не показана).
Буровой манипулятор работает следующим образом.
При подъеме стрелы 1 зубчатое колесо 17 обкатывается по колесу 15 и через вал 19 и колесо 18 передает вращение колесу 16 В результате шарнир 6, оголовок 8 и шарнир 7 опуска- ются относительно стрелы 1 и тяги 2 на тот же угол, на какой стрела 1 и тяга 2 поднимаются относительно горц
0
5
0 5 о Q ,
0
зонтальной плоскости. Бурильная машина остается параллельной первоначальному положению. Опускание стрелы 1 происходит аналогично.
При подъеме, опускании и повороте стрелы 1 на тягу 2 действуют изгибающий момент и поперечная нагрузка, под воздействием которых упругие элементы 12 деформируются, сектора 11 перемещаются вдоль направляющих пластин 13 и тяга совершает линейное и угловое перемещения относительно цилиндров 9 и 10. Посредством назван- , ных перемещений тяга 2 самоустанавливается в положении силового равновесия, что позволяет уменьшить поперечную деформацию тяги и, в свою очередь, улучшить условия работы упругих элементов 14 за счет понижения сопротивления перемещению секторов 11 (поршней) в цилиндрах .9 и 10.
Формула из обретения
1.Буровой манипулятор, включающий неподвижное основание, стрелу, оголовок и тягу, которые образуют шарнирно-параллелограммный механизм, цилиндры, соединенные соответственно с основанием и оголовком, поршни, закрепленные на концах тяги и размещенные внутри цилиндров, и упругие элементы, установленные внутри цилиндров- по их продольной оси между торцами поршня и цилиндра, отличающийся тем, что, с целью повьш1ения надежности работы манипулятора за счет уменьшения поперечной деформации тяги при силовом нагружении конструкции, поршни выполнены полыми, а тяга - с дополнительными упругими элементами, размещенными внутри поршня и расположенными в плоскости, перпендикулярной к продольной оси тяги, при этом тяга установлена с кольцевым зазором относительно внутренней поверхности поршней.
2.Манипулятор по п. 1, о т л и - чающийся тем, что контактирующие с цилиндрами поверхности поршней выполнены сферическими.
3.Манипулятор по ti, 1, отличающийся тем, что поршни выполнены в виде секторов, установленных с зазором относительно друг друга.
Ю
8
i- /4l6/
94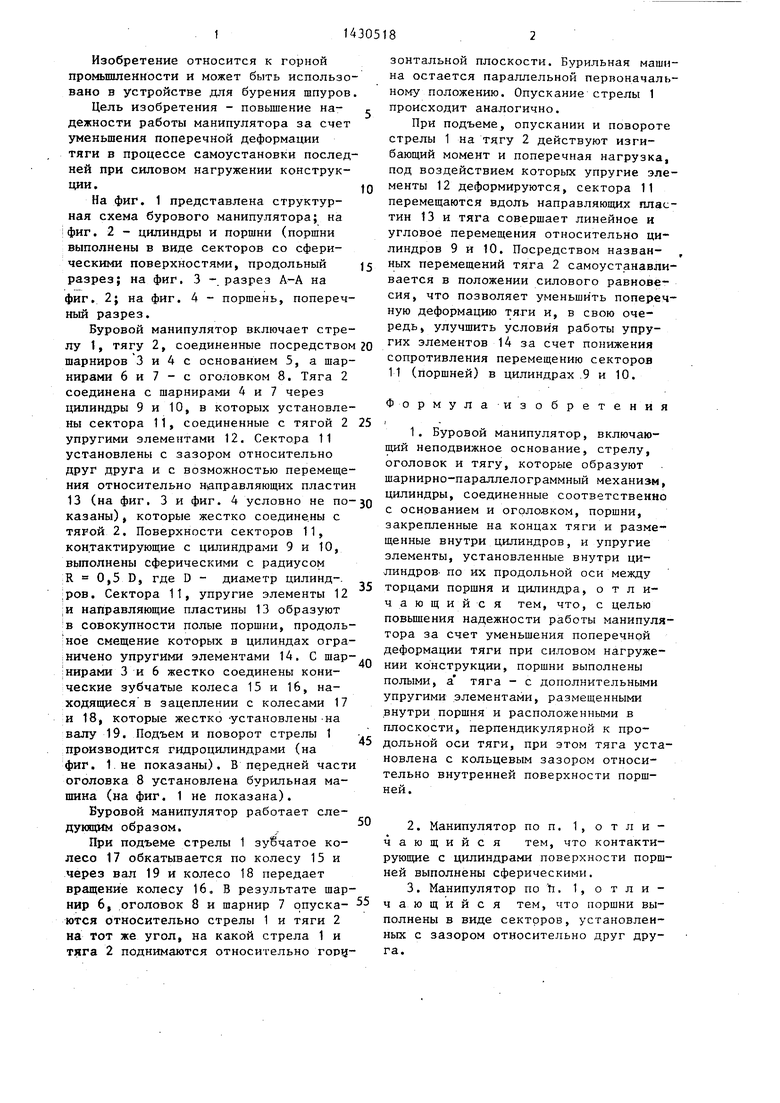
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровой манипулятор | 1984 |
|
SU1170135A1 |
| Буровой манипулятор | 1985 |
|
SU1270318A1 |
| Буровой манипулятор | 1988 |
|
SU1578327A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| Буровой манипулятор | 1985 |
|
SU1348511A1 |
| Устройство для осмотра и ремонта мостов | 1975 |
|
SU536280A1 |
| Кран-манипулятор | 1978 |
|
SU933622A1 |
| Буровой манипулятор | 1989 |
|
SU1652537A1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
Изобретение относится к горной пром-сти и м.б. использовано для бурения шггуров. Цель изобретения - повышение надежности работы манипулятора за счет уменьшения поперечной деформации тяги при силовом нагруже- ии конструкции. Манипулятор содер- ;жит неподвижное основание, стрелу, оголовок, поршни. Последние закреплены на концах тяги 2 и размещены внутри . I ff W / / 74 2 / f3 13 12 I цилиндров (ц) 9 и 10. Внутри последних по их продольной оси между торцами поршня и Ц размещены упругие элементы 14. Поршни выполнены полыми. Тяга 2 выполнена с упругими элементами 12, размещенными внутри поршней и расположенными в плоскости, перпендикулярной к.продольной оси тяги 2. Последняя установлена с кольцевым зазором относительно внутренней поверхности поршней. Контактирующие с П 9 и 10 поверхности поршней выполнены сферическими. Поршни выполнены в виде секторов 11, установленных с зазором относительно друг друга. При перемещении стрелы на тягу 2 действуют изгибающий момент и поперечная нагрузка. Под действием последних элементы 12 деформируются, сектора 11 перемещаются и тяга 2 совершает линейное и угловое перемещения относительно Ц 9 и 10. Это позволяет улучшить работу элементов 14. 2 з.п. ф-лы, 4 ил. // S со (Л 4 00 о ел СХ) 12 (f)4S.2
(риг. З
| Манипулятор для бурильных машин | 1980 |
|
SU891905A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Буровой манипулятор | 1984 |
|
SU1170135A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
