11ч()Пр1Ч(. нис oriKJCiticH к I ))H()ii iipo- vii,iiii, R H)i(, ;i oo. it O конкретно к ;jHT()ia- i n;i;iiuin П хнологическнх iipoHcccoii доб1,1чи VI, 1И и л|)ги но. 1ечн1)1 нсконаемых.
Цель н:и)Г)|1етения поньнш-ние точности он)еле,1ення то.чишны уго.тыюй начки. иынимаемон очиетн1 1 1 комбайном с лвумя )аГ)оч11мн и eoo i ветстнии с ннео- ieipiuHi пласта процессе лоб1,1чи yi . iH.
lla (j)Hr. I н:«)Г))а/кс на схема раГкгп, ком- oaiiHa и , iaiie, 11ояснян)Н1ая н)ед. 1агаемый способ; на фиг. 2 и .функциональная схема устрсл к тна.
(Л1НХ|)()НН() с : аланн1)1М Hiaiovi месгона- хожлення комГ)а11на в .тане ()Н)елеляк)т рас- сгояння 01 верхнею края ие)него шбоче10о)гана KOMoaiiHa ло ei o Г)а:и)В()й осн. нро- холяпцм череч осл1 в)анцмн1Я HoHopoiTibix |)ел кторов рабочнх о)1анов. iaHovuiiiaioT (начение расетояния от ве)хне1 о края верх- нсч о 1ежун1,е1() органа комбаЛиа ло ei o in- ло. 1Ы1оГ| оси на ба:1оиой л.тине. раиной рас - стояннк) межлу центрами враиим1ня режу- HUIX opi anoii, оиреле.тяют расстоянне ог нижнего к)ая нижнего рабочего органа ко |баГ|иа ло его базовой оси, а то.ицниу (и 1нимаемо11 угчхтьной начкн онреле.тяют с ммнрованием расстояння от ннжнего к)ая ннжне1() рабочего о|)гана ло ба:(овой осн комба11на с запомненным значением рассгояния от верхнего края ве 1хиего )або- чего органа ло базовой осн комбайна, ко- то)ое бькто оирс лелено в той же точке.
Г.униюсть снособа рассмотрена на рабо- Т1 уст 1ойства.
Очнсгной комбайн I 1см. . 1) нере- мешается вло.п, . в fiaHpafi. K HHH. на- нриме|), ио ст)елке .Л. ирн VTOM «fiepxHHV яв.тяется Рабочий орган (РО) 2, а «ииж- .. Оба РО 2 н 3 размени ны
на ново|1отных релукто|1ах 4 н . t ooTiU T- сгвенно.
Ec. iH вертикальные н.1оскости 1 I и
11П. нрохоляни1е через В|)аи1ення РО, ео1И1ала1)т, то оиреле.1нть ro.iHuiiiy libi- нимаемой пачки угля Ну можно, измеряя. нанрнме 1, углы новорота оСв н cf, новорог- ных релукторов 4 и о относительно базовой оси комба11иа нри изЕКЧ тной их ллине 1р и зная радиус РО R
Нуг ( R ± t sincx,) + (R|-± tpsino) (1)
Пе)вая часть форму.лы (1) характеризует положение верхнего РО 2 отиоеительно нро- ло;11)Н(й оси комбанна. а вторая часть нижнего РО 3. нричем знак ( -н ) в первой части (|)ормулы относится к ситуации, ксл да центр вращения РО 2 вьпие Г1родольной оси комбайна 1. а знак ( ) к нроти и)Н();|()ж- ной. Во второй части ({эормулы ( 1 ) этн зна- кн нротивоиоложны.
Таким образом, (|)()рмула (I) позволяет ()нреле.1ит1, толщину вынимаемой уг-о. 1ьной
0
0
5
0
5
0
5
0
5
начкн нри челноковой схеме выемки, когда при изменении направления движения комбайна нронеходит изменение положений РО на нротивоноложные.
Однако в реальной ситуации центры вращения РО и, следовательно, плоскости 1 I и И - II находятся одна от другой на расстоянии L, в то время как определять искомое значенне Иу необходимо в н.чос- костн I I. что вьггекаег нз фиг. 1. Для :по- 10 в кажд|)|й момент времени необходимо знать местонахождение ко.мбайна в лаве и положение верхнего (первая часть формулы (1), синхронно с онределением место- нахожлення комбайна заноминать положения Bei)xnero РО на нуги, равном 1. 1:с,ти в соответствии с :(1нм пронзволить вычисления по формуле (1), подставляя в первую часП) (|1ормулы те значення . Koiopiiie OH) ле.тя.1нсь в том месте, где произв(1лится онре- де.тешк текун1его но.южепня нижнего ре- жун1его органа комбайна, можно с требуемой точностью онрс делить нскомую ве.тичи- ну Цуг.
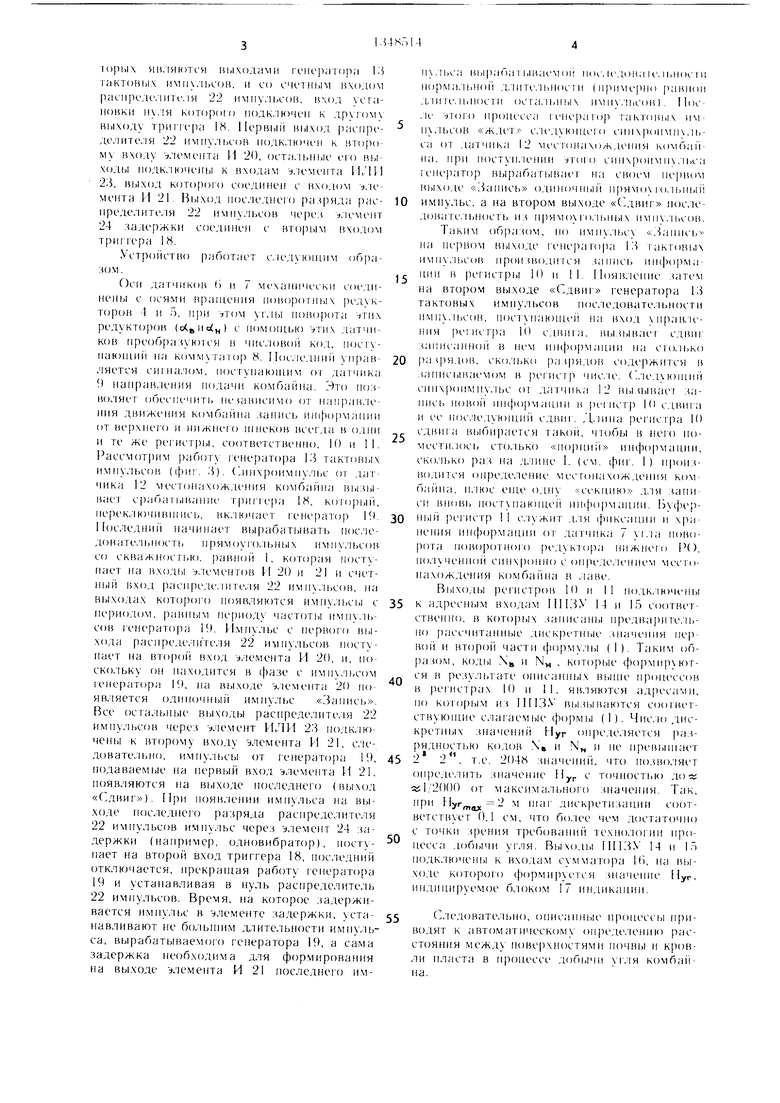
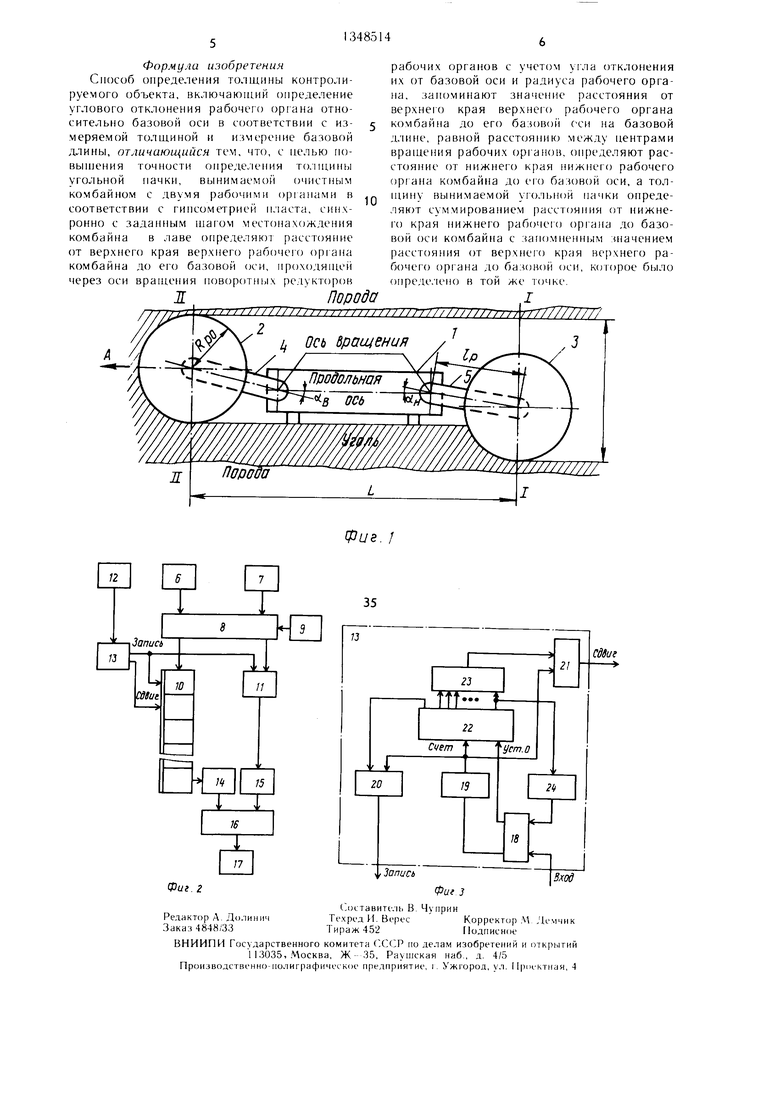
В качестве нримера реа.тизапни |ред.та- .чаемого снособа на (()Н1 . 2 Н1)иведена функ- Ц)1она.т1,ная схема устройсгва д.тя автома- гнческого онреде. 1ения )асстоян|1я между нове))сгямп почвы н кров.ли нласта в процессе уг.пя. на фиг. .3 приведена {)ункцпональиая схема 1ене|)ато|)а тактовых нмпу.чьсов.
VcT)oiicTBO содержит пс )вичные измери- тельн| 1е 11)еобразователи (далчики) 6 н 7 yr.ia поворота пово)отных редукгоров 4 н 5 комбайна 1 в код, нодк.люченные к входам коммутат())а 8, к ун|1ав.тяк)Н1ему входу которого подключен датчик 9 направ.тения но- чачн комба| 1на, выхолы коммутагора нод- к.1юч1 ны к 11нформаци()НН1,1м входам регпет- ра 1П сдвша и бу(()ерного решстра 11. Для синхрони.зацнн по но. южению комба11на в . lane устройство снабжено латчиком 12 мес- гонахождения комбайна, В1)1ход которого подк.тючен к управляюпк му входу г енера- тора 13 тактовых импульсов, одн)1 из выходов которого соединен с входами разрен е- ния заниси регистра 10 и 11, а другой нод- к.тючен к входу уп|)авления )егистра 10 сдви- а. Выходы perHcrjioB И) и II иодключены к алресным вхолам нрограм.мируемых постоянных заноминаюших устройств (Т1ПЗУ) 14 и 1.5 соответственно, выходы которых нод- к.тючены к сумматору К). Индикация нолу- чен11О1Ч) результата н)оизводнтся блоком 17 индикации. Генератор 13 тактовых импульсов (см. фиг. 3) содержит триггер 18. один из входов которого является управ- .ляющим входом генератора 13 тактовых имнульсов, один выход триггера 18 соединен с управляюниш вхолом генератора 19, выход KOTopoi o соединен с первыми входами двух элементов И 20 н 21, вы ходы коi()ii)i HB.iHK)TCH вихолими i enep;iT()i, i 13 i;iKT()Hi)i iiMiiy. ibcoB, и со счетным lixojioM paciipc.KMHTc.iH 22 n iny:ii)C()i, вход ycr;i- иовки iiy.iH KoTopdio иодк.лючсм к другому выходу трипч |К1 18. llepBi.iii выход распре- до,чите.ля 22 llMIiy, ll,COB ПОДК.ЛЮЧеН к ТО)0му входу а.чсмеита И 20, ()ст;),1ьиыс его вы- ход1)1 |1одк, 1К)чеиы к входам :1,1емепта 11, IH 23, выход которого соединен с входом :i,ie- мснта И 21. Выход носдеднею ра.(ряда рас- ||реде, 1нте,1я 22 , ibcoB чере.ч :1.темент 24 задержки соединен с вто|ч 1 1 входом триггера 18.
N cTpoiicTiio работает с,1едук)ни1М образом.
Оси датчиков ( и 7 механически сосди- иеШ) с осями вращения поворотных T(.ipoH 4 и ,), при этом )i поворота 4тих редукторов ((„) с номон1,ы() датчиков иреобразуюгся а чисдово код, носгу- иаюший на ) 8. П(1с,тедни(1 уирав- ляется снгиа, 1ом, иостуиаюшнм ог датчика 9 на11рав,.|еиня нодачи комбайна. Зто ноз- во.тяег обеспечить независимо от направ,тения движеиии комба(1иа запись ннформагши от верхиего и нижиего шнеков всегда в одни и те же регистры, соответственно. К) и 11. Рассм()Т|)нм работу гене)ат()ра ЬЗ тактовглх имггу.тьсов ((f)Hi 3). {л1н)оимг1у, гьс ог даг - чика 12 местонахождения комбаг ига ,1- riaer с|)аба гывагпп триггера 18, Korojiiiiii, нерек,1К)чив1Г1Нсг,, г)к, почает lerrepaTop 19. Последниг | начиггает вы)абат1)1ват1 Г1ос,че- довате, Н иость гг|)ямоуг-(),тьнг1ГХ 1гмну,1ьсог со ск ажност1 1). |)авггой I, кото)ая поступает на г ходьг :),тементог И 20 н 21 и счет- вход расиреде.т1гте,тя 22 имггу.тьсов, на
ВЬГХОДа.Х КОТОрОГ О ГГОЯВЛЯЮТСЯ ИМГ1у.ТГ)СГ,) с
нериодом, ())ГМ ггериоду частотг.г нмг1,гь- сов геггератора 19. Импульс с nepriorii вг.г- хода раснреде,тг1 те.тя 22 импульсов посту- 1гает на гго)ой ход у.темента И 20, и, iro- скольку он находится в (})азе с ггмггу, гьсом генерато)а 19, на вьгходе ъ,те.меита 20 iro- яв,1яется одиночньгг импу:гьс «Записг. Все остальггг.ге вьгходы рас1греде, гите,тя 22 имггу/гг сов через (.темент И/1И 23 подк,1Ю- чеиы к второму входу элемента И 21, с,те- довате.тыго, импу.гьсы от Г енерато)а 19, подаваемые на ггернг гй вход алемеггта И 21, ГГОЯВЛЯЮТСЯ на выходе ггоследнег о (вьгхсхч «Сдвиг-). Ори ггояв.тении импульса ira выходе ггоследнег о разряда распределите.тя 22 имггульсов импульс через у.темент 24 задержки (например, одновибратор), посту- 1гает на второй вход триггера 18, ггоследний отключается, ирекраи1ая работу генератора 19 и устанавливая в нуль распределитель 22 имггульсов. Время, на которое задерживается импульс в элементе задержки, устанавливают не больгггим длительности имнул)- са, вырабатываемог о генератора 19, а сама задержка необходима для формирования на выходе элемента И 21 носледнег о им5
0
0
гг . вырабат1)Пии мои пос, 1едона гс 1ьпос i н HopNra. ir.iroii д, пгте, Ь11осгт1 (нрггчи-рно Д.1И 1C, 1г,иос ги осга,гьггы ,1ьсов I. Мос- , ге этогч) и|1онссса геиерагор тактовьгх имП.Г|,СОВ «ждет :- С,)ИиЧ(1 (,11,са от датчика 12 местонахождения комбайна, ггри ностун.гегнги этого с1П1хрои гпу,1ьса геггератор гИ)1рабатьгвает ira своем первом ()де «Запись одиггочпыг прямоч Г(1, 0 имнульс, а на втором выходе нос.теДОГ а ГС,1ЬПОСТЬ из ()уГО, ИМПу,ТГ)С()В.
об|)азом, но имну, Н)Су «Занись на )м )1 гходе гч нерато|1а 13 гактовг,1х импу,тг,с()в производится заггись ип(|)орма, НИН в регистр, 10 и И. 11ояг.гение затем на втором вьгходе «Сдвиг генератора lii тактовых импульсов последовательности riMii,, (гоступаюггич гга вход rrfiart. ic- ппя регггстра 10 , Г5ьги 1васт сдвпг заннс аггпогг в нем ип(|)ормаггни па сго,ьк()
0 ря.1ов. ско.тгжо разрядог) соде|1жигся г .аписыг аемом в регисгр чнс, 1е. (;,тед югггий сппхроимггу.гьс ог датчика 12 ) за- пнс HOBor i пп(||ормации ri )ei гк тр Ю сдвига гг ее 1гос, 1едук)гцнй сдгягг. Д,1ииа регисг ра 10 сдгипа г ьгби|1ается такой, чтобы в него но- мести,1ось CTo.iiiKo «гго|111ий ин(|1ормаги1и, ск(),тг,ко раз на д.тгггге L (см. ф. I) нроиз- водптся О1греде.тение гестонахождения ком- баггна, и,тюс еиге одну «сс кпию д,1я записи гиювь ггостуггагогпей иггфо|П1агиги. )y(|)e|v
0 нг.гг) регистр 1 1 с,ужит д,тя (|1иксагггпг и хра пеггия и1Г(|)()рмаинп от датчика 7 r,ia поворота поворотного )1 дук Г())а пижггего (), гго.тученной синхронно с о1Г|и де, Г( месго- }гахожден1гя комбайна в .тагн
Вьгходьг peiTicTpoB 10 н II подк,тн)чены
5 к адресги 1м входам ПИЗУ 14 и 15 соответ- ственгго, в кото|1Г г занисагп, ггредварггте,1г,- гго )ассчитанрп ге дискретиГ)1е значения ne|i- riori и BTOpoif части ())орму, 1Ы (I). Таким об- , кодьг Х и N . котор| ге форчгируюг- ся Г резу, онисаиггг гх ВГ)ГГГ1С rrponeccorj в |)ег нстрах 10 и II, яв,тяк)тся адресами, 1ГО которГ)1М из II ПЗУ вг1ГЗГ1ГГ ак)тся соогвег- ствуюггиге слаг аемг,ге (|) (1). Чис.юдис- кретньгх значений -|уг оггреде.тяется |1аз- ряд1Г(х ТГ)К) кодов в и NH и не Г1рев1,пнает
5 2 2 т.е. 2048 значений, что ггозг)о,тяет оиреде, гитг1 значение Hyp с точностью lo-x «1; 2000 от максима.тьпог о значения. Так, ггри 2 м игаг дискретггзации соответствует 0,1 см, что бо,тее чем достаточно с точки зреггия )овагпп г техно.тог гпг иро- несса уг ля. Вг11ходг,1 ПИЗУ 14 и г, подк. гючеггы к входам сумматора 1в, на вг,г- ходе кот()Х)го формируется значение Нуг, ггпдггни1 уемое блоко.м 17 иггдикапин.
55(ледовате.тг,и(), оггисанггьге np()iieccr,r ir niводят к автоматическому ог1реде,тегн1ю рас- стоян1гя между ггове|)Х1гостями ггочвы н кровли ггласта в п|)опессе доб1)Гчи ч.тя комбайна.
Формула изобретения Способ определения толщипы контролируемого объекта, включающий определение углового отклонения рабочего органа относительно базовой оси в соответствии с измеряемой толщиной и измерение базовой длины, отличающийся тем, что, с целью по- вьипения точности определения толщины угольной пачки, вынимаемой очистным комбайном с двумя рабочими органами в соответствии с гипсометрией пласта, синхронно с заданным niaroM местонахождения комбайна в лаве определяют расстояние от верхнего края верхнего рабочего органа комбайна до его базовой оси, проходящей через оси вращения поворотных редукторов
IПоро
рабочих органов с учетом угла отклонения их от базовой оси и радиуса рабочего органа, запоминают значение расстояния от верхнего края верхнег о рабочего органа комбайна до его базовой сси на базовой длине, равной расстоянию между центрами рабочих opi-аиов, онределяют расстояние от нижнего края нижнего рабочего органа комбайна до его базовой оси, а толщину вынимаемой уг ольной пачки определяют суммированием расстояния от нижнего края нижнего рабочею органа до базовой оси комбайна с запомпенным значением расстояния от верхнего края ве)хиего рабочего органа до базовой оси, которое было опреде.чено в той же точке.
US. 1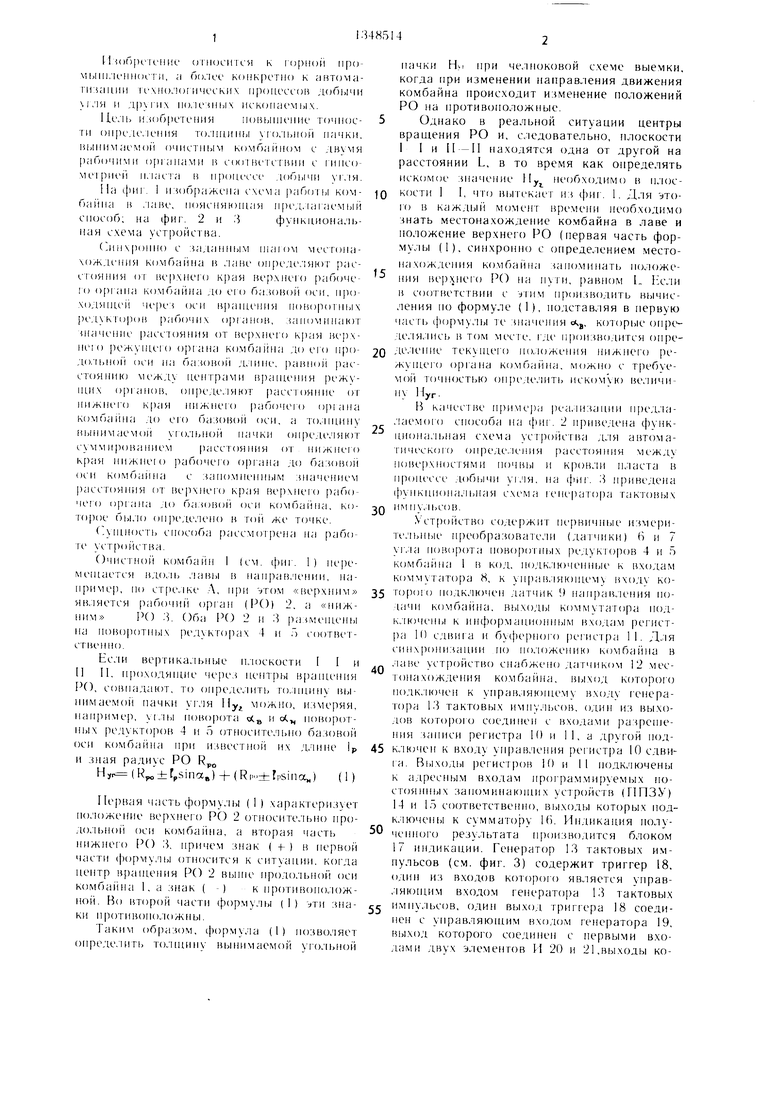
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Угольный комбайн | 1940 |
|
SU60868A1 |
| Проходческий комбайн | 1986 |
|
SU1528905A1 |
| Прямоточный зерноуборочный комбайн | 1950 |
|
SU88800A2 |
| Способ контроля выбросоопасности пласта при его выемке | 1985 |
|
SU1314121A1 |
| Способ управления положением рабочего органа проходческого комбайна и устройство для его осуществления | 1979 |
|
SU1105126A3 |
| Система автоматического управления исполнительным органом проходческого комбайна избирательного действия | 1986 |
|
SU1330311A1 |
| Способ и устройство контроля положения исполнительного органа горной машины относительно границы уголь-порода | 1977 |
|
SU767346A1 |
Изобретсннс относится к горной пром- ти и предназначено для автоматизации те.хнологических процессов. Цель изобретения - повышение точности определения толщины УГОЛЬНОЙ начки, вынимаемой очистны.м комбайном с двумя рабочи.ми органами (РО) в соответствии с гипсомет- )ией пласта. Для этого синхронно с заданным татом местонахождения комбайна в лаве определяют расстояние от верхнего края верхнего РО комбайна до его базовой оси, проходягцей через оси вращения поворотных редукторов РО. Запоминают значение расстояния от верхнего края верхнего РО комбайна до его продольной оси на базовой длине, равной расстоянию между центрами вращения РО, Определяют расстояние от нижнего края нижнегч) РО комбайна до его базовой оси. Толщину вынимаемой угольной иачки определяют суммированием расстояния от нижнего края нижнего РО до базовой оси комбайна с заполненным значением расстояния от верхнего края верхнего РО до базовой оси комбайна, которое было определено в той же точке. 3 и. к i сл со 4 00 О1
Фиг. г
Фиг
Редактор А. Долинич Заказ 4848/33
Сл)1:тавит(-. 1ь В. Чуприн
Техред И. ВересКорректор М Демчик
Тираж 452Подписное
ВНИИПИ Государственного комнтета (.С(Р по делам изобретений и
1 13035, Москва, Ж- 35, Раушская наб., д. 4/5 Производственно-полиграфическое преднриятие, i. Ужгород, ул. Ipi
открытии ектпая, 4
открытии ектпая, 4
| Авторское евндетельство ( Х ,( .N1 10859, к, 1 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
