Изобретение относится к машиностроению и Может быть использовано во всех отраслях народного хозяйства в транспортных устройствах, различных автооператорах и манипуляторах, где необходимо преобразование возвратно-поступательного движения во вращательное с остановками на позициях.
Цель изобретения - повышение быстродействия при малом числе делений по окружности-.
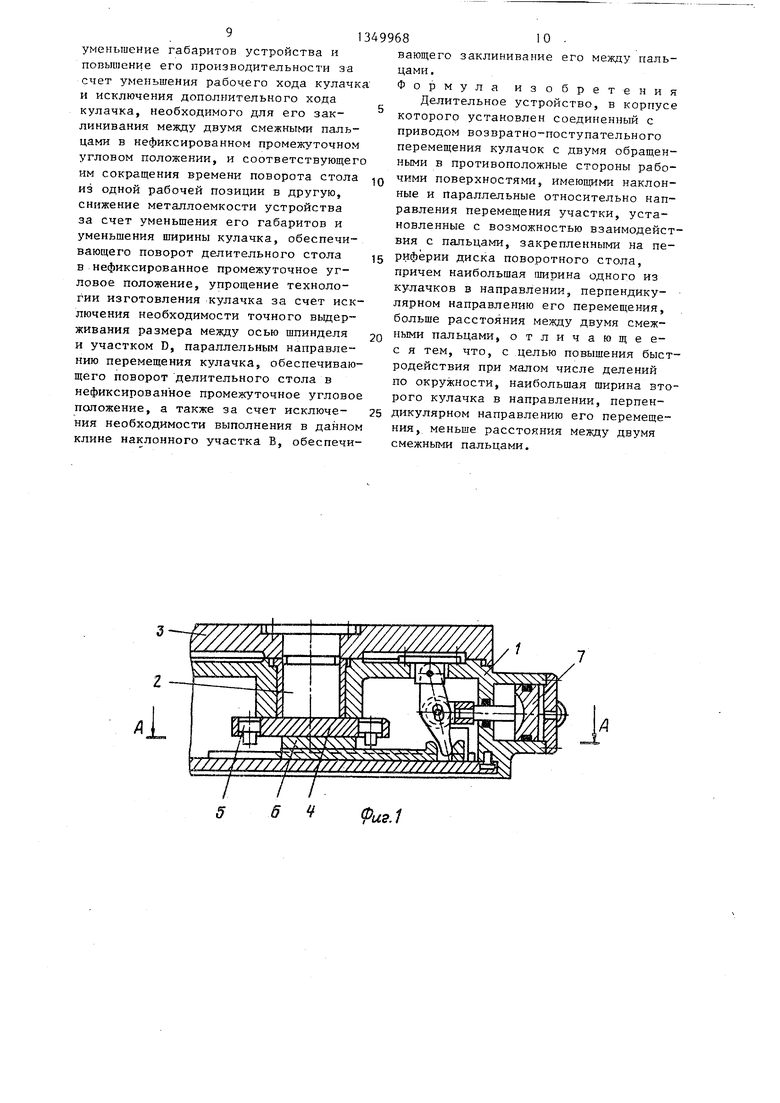
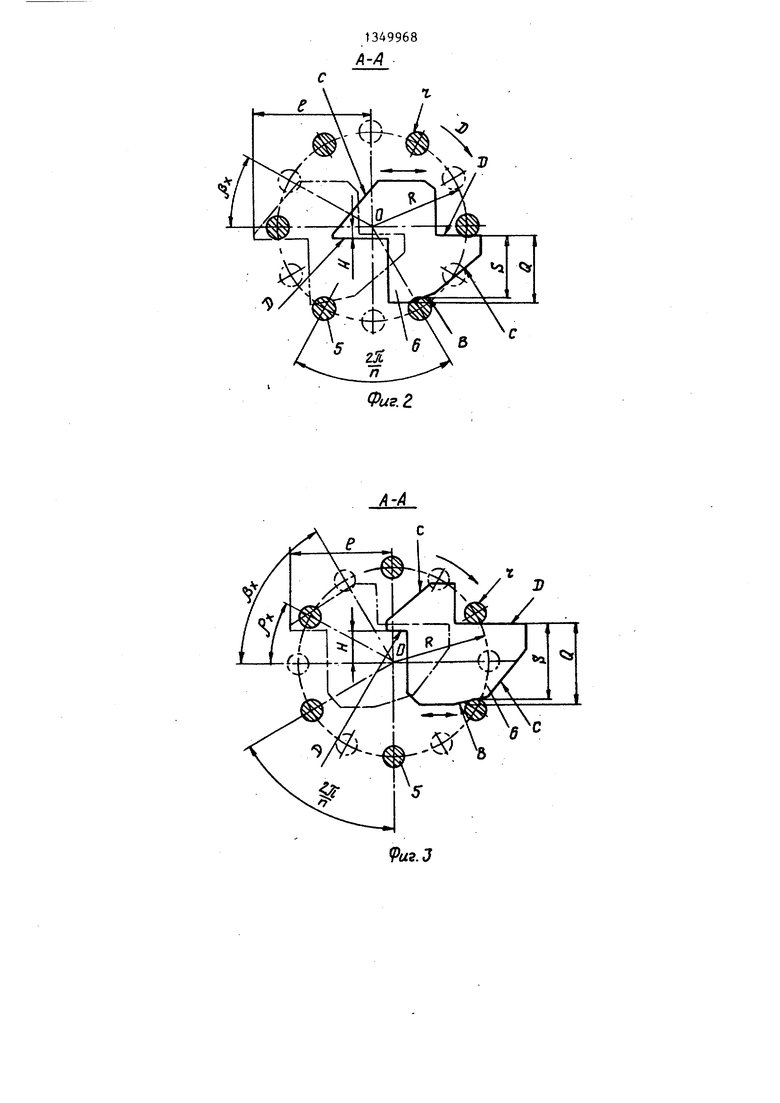
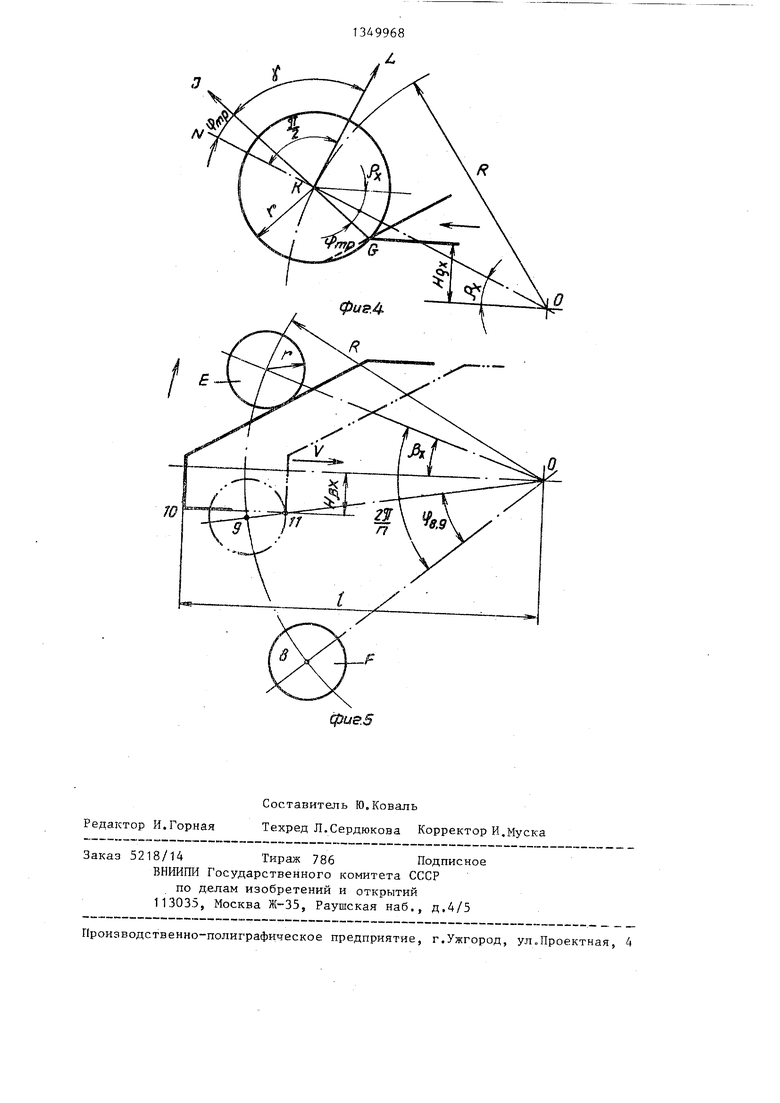
На фиг.1 изображено предлагаемое делительное устройство, разрез; на фиг.2 - разрез А-А на фиг.1 ( Рх 0); на фиг.З - то же ( 0); на фиг.4 - схема, поясняющая вывод уравнения (2); на фиг.5 - схема, поясняющая вывод уравнения (3).
Делительное устройство содержит корпус 1, в котором на шпинделе 2 закреплен поворотный стол 3 для установки транспортируемых изделий. На нижнем конце шпинделя 2 жестко закреплен диск 4 с установленными в нем пальцами 5, взаимодействующими с двумя обращенными в противоположные стороны рабочими поверхностями двухстороннего кулачка 6, установленного в корпусе 1 с возможностью возвратно- .поступательного перемещения от привода 7. Рабочие поверхности имеют наклонные С и параллельные D относительно направления перемещения кулачка 6 участки, причем кулачок, обеспечивающий доворот поворотного стола 3 в рабочую позицию (на фиг.2 и 3 правьш кулачок), имеет дополнительную рабочую поверхность В, служащую для фиксации поворотного стола 3 на рабочей позиции и имеющую угол наклона меньше угла трения.
Наибольшая ширина Q кулачка 6, обеспечивающего доворот поворотного стола 3 в рабочую позицию с последующей его фиксацией в направлении, перпендикулярном направлению его перемещения, больше или равна расстоянию S между одновременно взаимодействующими с ним двумя смежными пальцами 5, мезкду которыми располагается кулачок 6 в конце его хода, т,е. .
В противоположном кулачке, который обеспечивает поворот стола 3 только в нефиксированное промежуточное угловое положение, расстояние И между параллельной направлению перемещения кулачка 6 рабочей поверхностью и
.осью шпинделя определяется зависимостью
н е Нр . H.J,
(1)
где Н - расстояние между параллельными направлению перемещения кулачка 6 участком, взаимодействующим с пальцами 5 только в нефиксированных промежуточных угловых положениях стола 3, и осью шпинделя 2; Р), угол начального положения
пальца 5, взаимодействующего с наклонным участком кулачка 6, обеспечивающего движение поворотного стола 3 в нефиксированное промежуточное угловое положение, т.е. угол с вершиной, лежащей на оси шпинделя 2, одна сторона которого параллельна направлению перемещения кулачка 6, а вторая проходит через ось пальца 5 в первоначальный момент контакта последнего с наклонным участком
кулачка 6, О $/х --п
где
5
0
5
0
5
п
Н
fx Ах
число пальцев 5 на диске 4; ,
предельное значение величины Н при угле jjj, ; угол конечного положения .пальца .5, взаимодействующего с наклонным участком рабочей поверхности кулачка 6, обеспечивающего движение поворотного стола 3 в нефиксированное промежуточное угловое положение, т.е. угол с вершиной, лежащей на оси шпинделя 2, одна сторона которого параллельна направлению перемещения ку.-- лачка 6, а вторая проходит через ось пальца 5 в конечный момент контакта последнего с наклонным участком рабочей поверхности кулачка 6, 2
u - . ;-
О
предельное значение величины Н при угле (х ,
причем Н .,
J уравнении
и И . определяются иь
Rsinp -rsiTi(c/.,+Ях ) -Нрх 0 ; (2)
(3)
де R - радиус окружности, на которой расположены пальцы 5 на диске 4; г - радиус пальцев 5;
(f - угол трения наклонного
участка рабочей поверхности кулачка 6 по пальцу 5;
1 - максимальный вылет кулачка 6, т.е. расстояние от плоскости, проходящей через ось шпинделя 2 и перпендикулярной направВ указанном случае угол давления у кулачка на палец определяется углом
лению перемещения кулачка
6, до вершины кулачка 6, 25 IKL (углом давления называется угол обеспечивающего движение между направлением движения тела и
направлением силы, действующей на это тело, если этот угол равен углу трения или меньще его, появляется 3Q самоторможение). Кроме того, при угле давления 90° кулачок стопорит поворотную систему. В действительности, учитывая трение в системе, моповоротного стола 3 в нефиксированное промежуточное угловое положение при угле j ; .
V - скорость обратного хода кулачка 6;
t - время переходного процесса, т.е. время пepieключe- ния движения кулачка 6 на обратный ход;
LO - угловая скорость поворотной части делительного устройства в момент прекращения воздействия кулач- до ка 6 на палец 5;
Е - угловое ускорение, с которым вращается поворотная часть делительного устройства, двигаясь по инерции, ..с 0..
Уравнения (2) и (3) вьтодятся следующим образом (фиг. 4 и 5).
На фиг.4 изображен момент начала взаимодействия пальца 5 (фиг.1), установленного в диске 4, с наклонным участком рабочей поверхности кулачка 6, обеспечиваюрдего движение поворотного стола 3 только в нефиксированное промежуточное угловое положение, а также граничное значение величины .РХ Р дальнейщем увеличении ее значения вращение диска 4 с установленными в нем пальцами 5, а слемент стопорения наступает несколько раньше, а именно при v 90 - ч , где (f - угол трения наклонного участка рабочей поверхности кулачка по пальцу.
Таким образом, угол давления
IKL - i- , т.е.
LGKO (
rf
Тогда, в соответствии с фиг.4, получается уравнение (2):
R sin; - г sin (t/ p+pp-H 0.
Известно, что угол начального положения пальца, взаимодействующего с наклонным участком рабочей поверх- 5Q ности кулачка, обеспечивающего движение поворотного стола в промежуточное угловое положение, должен находиться в пределах
55
О «
ь. -:-.
(4)
Рабочая поверхность кулачка 6, обеспечивающая поворот стола 3 только в промежуточное угловое положение
499684
довательно, и шпинделя 2 с закрепленным на нем поворотным столом 3- произойти не может. В указанном случае в начальный момент контакта пальца с наклонным участком рабочей поверхности кулачка последний взаимоде1Чст- вует с пальцем, т.е. происходит кон- ) такт в точке G. Усилие, с которым
Q рабочая поверхность кулачка действует на палец, направлено по нормали к поверхности данного пальца, т.е. определяется вектором GI, проходящим через ось пальца К. Направление, по
15 которому данный палец стремится начать вращение, определяется вектором KL, являющимся касательной к окружности радиуса R, на которой расположены пальцы 5 на диске 4 (фиг.1), и
20 проходящим через ось пальца К в момент начала взаимодействия пальца и кулачка.
В указанном случае угол давления у кулачка на палец определяется углом
25 IKL (углом давления называется угол между направлением движения тела и
мент стопорения наступает несколько раньше, а именно при v 90 - ч , где (f - угол трения наклонного участка рабочей поверхности кулачка по пальцу.
Таким образом, угол давления
IKL - i- , т.е.
LGKO (
rf
Тогда, в соответствии с фиг.4, получается уравнение (2):
R sin; - г sin (t/ p+pp-H 0.
Известно, что угол начального положения пальца, взаимодействующего с наклонным участком рабочей поверх- ности кулачка, обеспечивающего движение поворотного стола в промежуточное угловое положение, должен нахоиться в пределах
55
О «
ь. -:-.
(4)
Рабочая поверхность кулачка 6, обеспечивающая поворот стола 3 только в промежуточное угловое положение
(фиг.5), взаимодействует с пальцем Е своим наклонньм участком. В соответствии с целью предлагаемого устройства необходимо обеспечить прекращение, воздействия наклонного участка данной рабочей поверхности на палец Е при каком-то угле , с тем условием, чтобы поворотная часть
только в нефиксированных промежуточных угловых положениях стола, и осью шпинделя), при котором отсутствует взаимодействие пальца F с параллельными направлению перемещения кулачка участкомJ R - радиус окружности, на которой расположены пальцы 5 на диске 4; г - радиус пальцев 5; V - скоустройства, включающая диск 4 с уста- -JQ рость обратного хода кулачка 6.
новленными в нем пальцами 5 (фиг.О Граничное условие отсутствия взаимодействия пальца F с участком рабочей поверхности кулачка, параллельдвигаясь по инерции после прекращения воздействия наклонного участка кулачка 6 на палец Е, не входила в контакт с участком, параллельным направлению перемещения кулачка 6, посредством пальца F, отстоящего от пальца Е на
„ 2JT
угловой-шаг, равный рад (п - число пальцев 5 на диске 4), в направлении, противоположном вращению.
На,фиг,5 обозначены: точка 8 - положение оси пальца F в момент прекращения воздействия наклонного участка на палец Е; точка 9 - граничное положение оси пальца F, движущегося по инерции вместе со всей поворотной частью устройства, соответствующее максимальному углу ц. поворота данного пальца, при котором отсутствует взаимодействие между ним и параллельным направлению перемещения кулачка его участком; точка 10 - положение вершины кулачка в момент прекращения воздействия наклонного участка на палец Е, расстояние от данной точки до плоскости, проходящей через ось шпинделя и перпендикулярной направлению перемещения кулачка, соответствует максимальному вылету кулачка 1 при его движении, которое обеспечивает поворот устройства в нефиксированное промежуточное угловое положение; точка 11 - граничное положение верптны кулачка при обратном его движении со скоростью перемещения V, после которого отсутствует взаимодействие данного кулачка с пальцем F; Н предельное значение вепичины Н (расстояние между параллельным направлению перемещения кулачка участком, взаимодействующим с пальцами
ной,направлению его перемещения, 15 следующее:
10, 11
ч- t. Т
в,9
(5)
где Т
8,9
20
25
30
время.поворота пальца F из положения 8 в положение 9;время переходного процесса (время переключения движения кулачка на обратный ход);
время движения кулачка из положения 10 в положение 11. Определяют время поворота пальца
F из положения 8 в положение 9. В
соответствии с фиг.5 угол
п
О,-л
ч
8,9
-Лх - arcsin (
R-r
35
(6)
Уравнение равнозамедленного движения пальца F, двигающегося по инерции из положения 8 в положение 9 с угловым ускорением Е : О, имеет вид
40
шТ
ет1,9
8,3
V
В,9
(7)
где и - угловая скорость поворотной части делительного устройства в моД2 мент прекращения воздействия рабочей поверхности кулачка на палец.
Подставив в уравнение (7) величину угла i/g согласно формулы (6), сделав преобразования и решив полуgQ ченное полное квадратное уравнение, определяют время поворота пальца F из положения 8 в положение 9
Г 2 f
-tJ 2 п arcsin R-r
Из полученных по формуле (8) двух
8,9
Г2Т Них О
i t 2iI:i: : i : i.Ei ::j13 99686
только в нефиксированных промежуточных угловых положениях стола, и осью шпинделя), при котором отсутствует взаимодействие пальца F с параллельными направлению перемещения кулачка участкомJ R - радиус окружности, на которой расположены пальцы 5 на диске 4; г - радиус пальцев 5; V - ско- -JQ рость обратного хода кулачка 6.
ной,направлению его перемещения, 15 следующее:
10, 11
ч- t. Т
в,9
(5)
где Т
8,9
0
5
0
время.поворота пальца F из положения 8 в положение 9;время переходного процесса (время переключения движения кулачка на обратный ход);
время движения кулачка из положения 10 в положение 11. Определяют время поворота пальца
F из положения 8 в положение 9. В
соответствии с фиг.5 угол
п
О,-л
ч
8,9
-Лх - arcsin (
R-r
35
(6)
Уравнение равнозамедленного движения пальца F, двигающегося по инерции из положения 8 в положение 9 с угловым ускорением Е : О, имеет вид
шТ
ет1,9
8,3
V
В,9
(7)
где и - угловая скорость поворотной части делительного устройства в момент прекращения воздействия рабочей поверхности кулачка на палец.
Подставив в уравнение (7) величину угла i/g согласно формулы (6), сделав преобразования и решив полученное полное квадратное уравнение, определяют время поворота пальца F из положения 8 в положение 9
(8)
результатов выбирают наименьшее, т.е.
(9)
В соответствии с фиг.5 время жения кулачка из положения 10 в жение 1 1 IS-
- „Lz-fliiLEiIyb
tO|H
V
H л
+ t,
to
(101
-V
Известно, что угол конечного положения пальца, взаимодействующего с наклонным участком кулачка, обеспечивающим движение поворотного стола в цромежуточное угловое положение, должен находиться в пределах
О
2J
n
(11)
Таким образом, в соответствии с фиг. 4 и 5 величина Н должна принадСн
Н/ь,3, т.е.
лежать интервалу Н , .
Предлагаемое делительное устройст
во работает следующим образом.
В исходном положении (фиг. 2 и 3) кулачок 6 находится в крайнем правом положении. Правая рабочая поверхность кулачка 6, обеспечивающая доворот поворотного стола 3 в рабочую позицию с последующей его фиксацией, имеет наибольшую ширину в направлении перпендикулярном направлению его перемещения, больше или равную расстоянию S между одновременно взаимодейс- твующими с ним двумя смежными пальцами 5, между которыми -располагается данная рабочая поверхность в конце хода кулачка 6. Расклинивая указанные пальцы своими участками В и D, правая рабочая поверхность кулачка 6 фиксирует поворотный стол 3 от по ворота.
При поступательном перемещении кулачка 6 под действием привода 7 влево наклонный участок С левой рабочей поверхности кулачка 6, взаимодействуя с пальцем 5, обеспечивает поворот стола 3 по часовой стрелке и нефиксированное промежуточное уг- ловое положение. Принудительный поворот в нефиксированное промежуточное угловое положение под воздействием левой рабочей поверхности кулачка 6 на палец 5 происходит на участке
- Рх
т.е. на угле, меньшем либо равном половине углового шага между двумя смежными пальцами 5.
8 Подставив в уравнение (5) ,значе
ния Т
во 1
и Т
10,11
согласно формулам
(9) и (10) и сделав преобразования, получают уравнение (3)
2Е
г2Т n
/iy - arcsin
0.
0
5
0
5 0
5 0 5
В следующий момент кулачок 6 под действием привода 7 начинает движение в обратную сторону, а поворотная часть делительного утройства, содержащая шпиндель 2, поворотный стол 3 с закрепленными на нем изделиями, диск 4 с установленными в нем пальцами 5, продолжает вращаться по инерции. Так как все параметры делительного устройства соответствуют усло- в.иям, оговоренными формулами (1) - (4) и (11), участок D левой рабочей поверхности кулачка, параллельной направлению перемещения кулачка 6, не взаимодействует с пальцем 5. В результате этого отсутствуют остановка поворотной части делительного устройства, ее фиксация и расфиксация в промежуточном угловом положении.
При дальнейшем движении кулачка 6 вправо наклонный участок С его.правой рабочей поверхности входит в контакт с пальцем 5 и обеспечивает доворот в рабочую позицию вращающейся по инер ции поворотной части делительного устройства до тех пор, пока палец 5, ближайший к участку D правой рабочей поверхности, параллельному направлению перемещения кулачка 6, не входит в контакт с последней. После этого происходят расклинивание двух смежных пальцев 5 участками В и D и фиксация стола в рабочем положении.
Таким образом, использование предлагаемого изобретения обеспечит снижение энергозатрат за счет уменьшения усилий, необходимых на доворачи- вание в рабочую позицию вращающегося по инерции стола, а также за счет исключения усилий, необходимых для заклинивания и расклинивания кулачка в нефиксированных промежуточных угловых положениях стола; повышение долговечности устройства за счет продот- вращения ударных воздействий пальцев об участ ок кулачка, параллельный направлению перемещения последнего, а также счет уменьшения числа циклов заклинивания и расклинивания.
уменьшение габаритов устройства и повышение его производительности за счет уменьшения рабочего хода кулачка и исключения дополнительного хода кулачка, необходимого для его заклинивания между двумя смежными пальцами в нефиксированном промежуточном угловом положении, и соответствующего им сокращения времени поворота стола из одной рабочей позиции в другую, сн 1жение металлоемкости устройства за счет уменьшения его габаритов и уменьшения ширины кулачка, обеспечивающего поворот делительного стола в нефиксированное промежуточное угловое положение, упрощение технологии изготовления кулачка за счет исключения необходимости точного выдерживания размера между осью шпинделя и участком D, параллельным направлению перемещения кулачка, обеспечивающего поворот делительного стола в нефиксированное промежуточное угловое
положение, а также за счет исключе- 25 дикулярном направлению его перемещения необходимости выполнения в данном клине наклонного участка В, обеспечи10
2о
4996810 .
вающего заклинивание его между пальцами .
Формула изобретения Делительное устройство, в корпусе которого установлен соединенный с приводом возвратно-поступательного перемещения кулачок с двумя обращенными в противоположные стороны рабочими поверхностями, имеющими наклонные и параллельные относительно направления перемещения участки, установленные с возможностью взаимодействия с пальцами, закрепленными на пе- 15 рифёрии диска поворотного стола, причем наибольшая ширина одного из кулачков в направлении, перпендикулярном Направлению его перемещения, больще расстояния между двумя смежными пальцами, отличающеес я тем, что, с целью повышения быстродействия при малом числе делений по окружности, наибольшая ширина второго кулачка в направлении, перпенния, меньше расстояния между двумя смежными пальцами.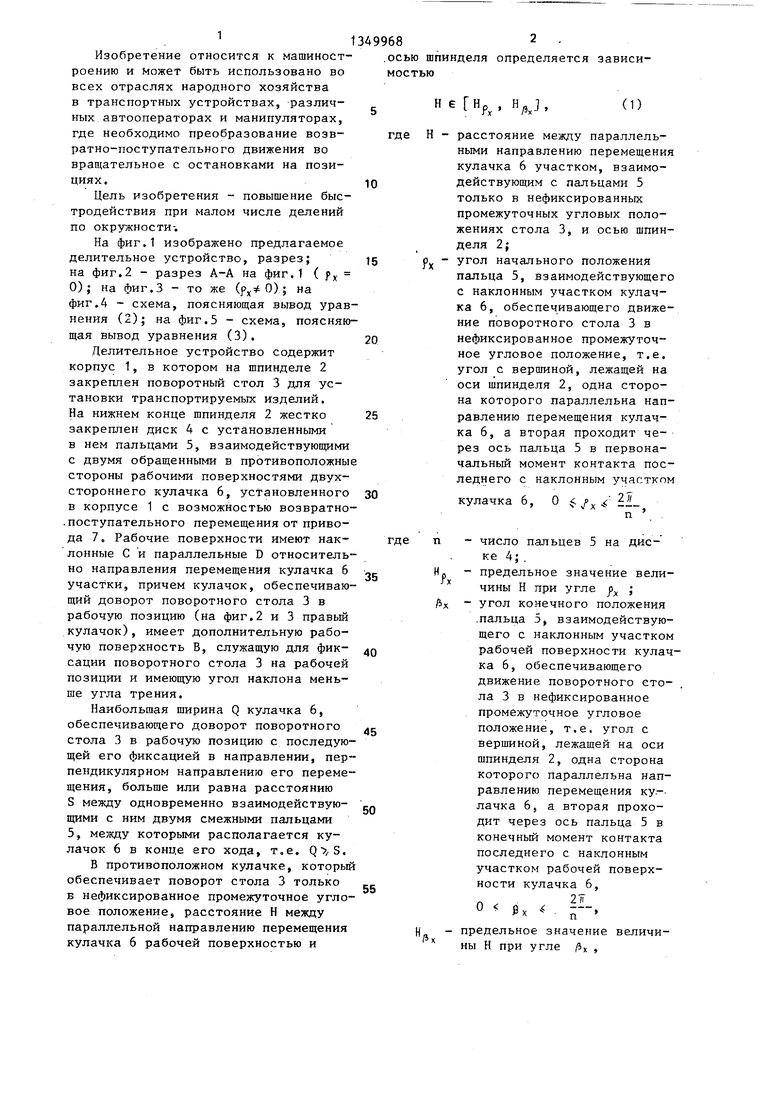



| название | год | авторы | номер документа |
|---|---|---|---|
| Делительное устройство | 1988 |
|
SU1634443A1 |
| Делительное устройство | 1981 |
|
SU1000234A1 |
| Делительное устройство | 1984 |
|
SU1196228A1 |
| Зубодолбежный станок | 1986 |
|
SU1518092A1 |
| Поворотно-делительный стол | 1982 |
|
SU1068263A1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 2013 |
|
RU2540250C1 |
| Станок для заточки многолезвийного инструмента с прямыми канавками | 1986 |
|
SU1395462A1 |
| ЧЕРВЯЧНАЯ ПЕРЕДАЧА, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ И ИНСТРУМЕНТ ДЛЯ ЕЁ ВЫПОЛНЕНИЯ | 1998 |
|
RU2200262C2 |
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ ПАРАЛЛЕЛЬНЫХ ПРОДОЛЬНЫХ ПАЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092285C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ ПАЗОВ В ОТВЕРСТИИ ДЕТАЛИ | 1992 |
|
RU2088385C1 |
Изобретение относится к машиностроению и может быть использовано в транспортных устройствах, различных автооператорах и манипуляторах, где необходимо преобразование возвратно-поступательного движения во вращательное с остановками на позициях. Целью изобретения является повышение быстродействия при малом числе делений по окружности. Делительное устройство содержит корпус, в котором на шпинделе закреплен поворотный стол для установки транспортируемых изделий. На нижнем конце шпинделя жестко закреплен диск с установлен- ньми в нем пальцами, взаимодействующими с двумя обращенными в противоположные стороны рабочими поверхностями двухстороннего кулачка, установленного в корпусе с возможностью возвратно-поступательного перемещения от привода. Наибольшая ширина кулачка, обеспечивающего доворот поворотного стола в рабочую позицию с последующей его фиксацией, больше или равна рас- стоянию между двумя смежными пальцами. Наибольшая ширина противоположного кулачка, обеспечивающего Поворот стола только в нефиксированное промежуточное угловое положение в направлении, перпендикулярном направлению его перемещения, меньше расстояния между двумя смежными пальцами. 5 ил. $ О5 СО О) 00
Фи.г
iK-Kx:
7-ff
9u3.J
л/
фи&5
Редактор И.Горная
Составитель Ю.Коваль
Техред Л.Сердюкова Корректор И.Муска
Заказ 5218/14 Тираж 786 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул„Проектная, 4
| Болотин Х.Л | |||
| Механизация и автоматизация станочных приспособлений | |||
| - М.: Машгиз,, 1962, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
