1
Изобретение относится к области машиностроения, а именно к манипуляторам и промышленным роботам.
Цель изобретения - упрощение конструкции устройства уравновешивания подвиж- ной части манипулятора.
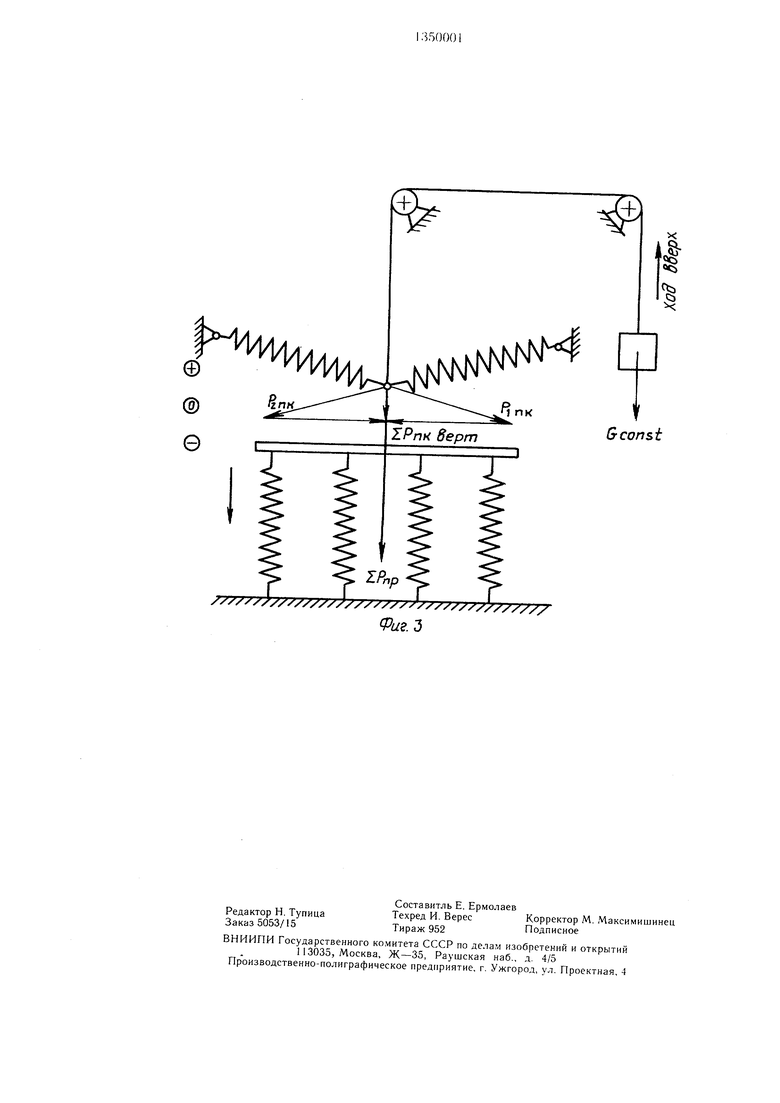
На фиг. 1 изображено устройсгво урав- нове1иивания вертикально подвижны.х частей манипулятора, разрез; на фиг. 2 и 3 - схемы действия сил при движении части манипулятора вниз и вверх.
Устройство состоит из основания 1, каретки 2 и механизма 3 компенсации изменения усилия пружины 4 при различных ее деформациях. Каретка 2 соединена с основанием 1 посредством пружин 4, П;зедпазна- ченных для уравновешивания, с другой стороны через трос 5, проходяп ий блоки 6, каретка 2 соединена с вертикально подвижной частью 7 .манипулятора. Упругие элементы 8 механизма 3 компенсации через шарниры 9 и 10 закреплены на основании 1 и каретке 2.
Устройство работает следуюш.им образом.
В средней точке хода каретки 2, обозначенной® (фиг. 2 и 3), вес подвижной части 7 уравновешен усилием пружин 4. при этом упругие элементы 8 механизма 3 комнеиса- ции расположены горизонтально и их суммарная вертикальная составляюшая равна 0. Уравновешенность системы определяется уравнением G ХРир.
При ходе подвижной части 7 вниз (фиг. 2) каретка 2 1ереме1цается вверх, растягивает пружины 4 и выводит упругие элементы 8 из горизонтального положения. При этом суммарное усилие пружин 4 SPnp. превышает вес подвижных частей G и эта разница компенсируется вертикальной составляюц;ей усилия упругих элементов 8 ХРлкпит. Уравнове
0
0
шенность системы определяется уравнением
G 2Рпр-2Рпк,верт..
При ходе подвижной части 7 вверх (фиг. 3) каретка 2 перемеш.ается вниз, растяжение пружин 4 уменьшается, упругие элементы 8 выводятся из горизонтального положения вниз. При этом суммарное усилие пружин 4 ZPiip меньше веса подвижной части Разница компенсируется вертикальной составляющей усилия упругих элементов 8 ХРпр.мрт. Уравновешенность системы определяется уравнением О ЕР р4-2Рпк.верт.
Таким образом, устройство уравновешивания в любой точке хода вертикально подвижной части манипулятора уравновешивает вес последней, что улучшает динамические характеристики манипулятора и позволяет применять в наиболее нагруженном приводе вертикального перемещения двигатель малой моц1.ности.
Формула изобретения
Устройство уравновешивания подвижной части манипулятора, содержащее установленную ца основании с возможностью вертикального перемещения каретку, кинематически связанную с подвижной частью манипулятора и посредством пружины и механизма компенсации изменения ее усилия при различных деформациях - с основанием, отличающееся тем, что, с целью упрощения конструкции, механизм компенсации выполнен в виде упругих элементов, одни.ми своими концами шарнирно связанных с основа- ние.м, а други.ми - с кареткой, при этом центрь шарниров, связывающих упругие элементы с основание.м и кареткой в ее среднем положении, расположень в одной плоскости.
(rconst
Рпк Scpm Я, ПК Sspm + fP; пкКерт
fpus.:5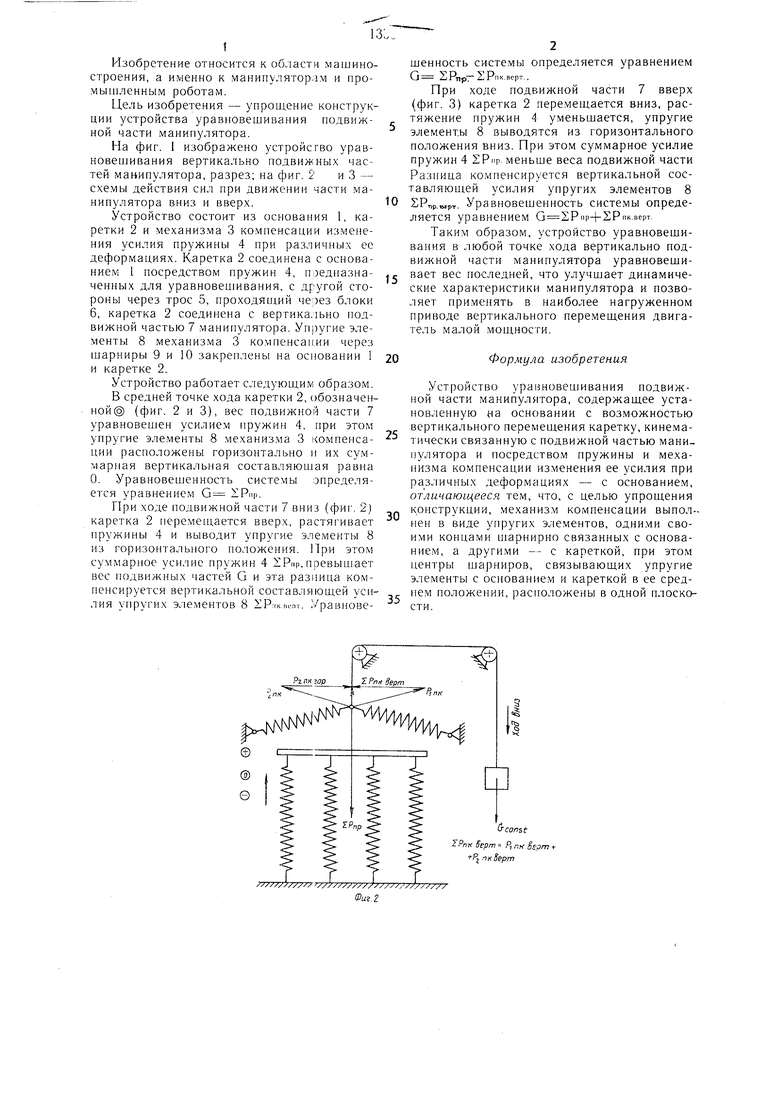
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| Уравновешенный манипулятор | 1987 |
|
SU1491698A1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ШПИНДЕЛЯ ПРИВОДА ВАЛКОВ ПРОКАТНОГО СТАНА | 1992 |
|
RU2015758C1 |
| УРАВНОВЕШЕННЫЙ МАНИПУЛЯТОР | 1993 |
|
RU2090351C1 |
| Устройство для обвязки предметов лентой | 1981 |
|
SU990591A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУКИ | 2019 |
|
RU2720744C1 |
| Способ замены грузозахватных приспособлений самоуравновешивающегося манипулятора | 1986 |
|
SU1648888A1 |
| Уравновешенный манипулятор | 1981 |
|
SU1000271A1 |
| Манипулятор | 1984 |
|
SU1247264A1 |
Изобретение относится к области машиностроения, а именно к манипуляторам и промышленным роботам. Целью изобретения является упрощение конструкции устройства. Для этого подвижная часть 7 манипулятора связана с механизмом компенсации 3 усилия уравеновешивающих пружин 4, который имеет упругие элементы 8. При ходе подвижной части 7 вниз или вверх усилие пружин 4 изменяется, при этом разница усилий от массы подвижной части 7 и пружин 4 компенсируется дополнительным усилием, создаваемым упругими эле.ментамн 8. 3 ил. (Л со СП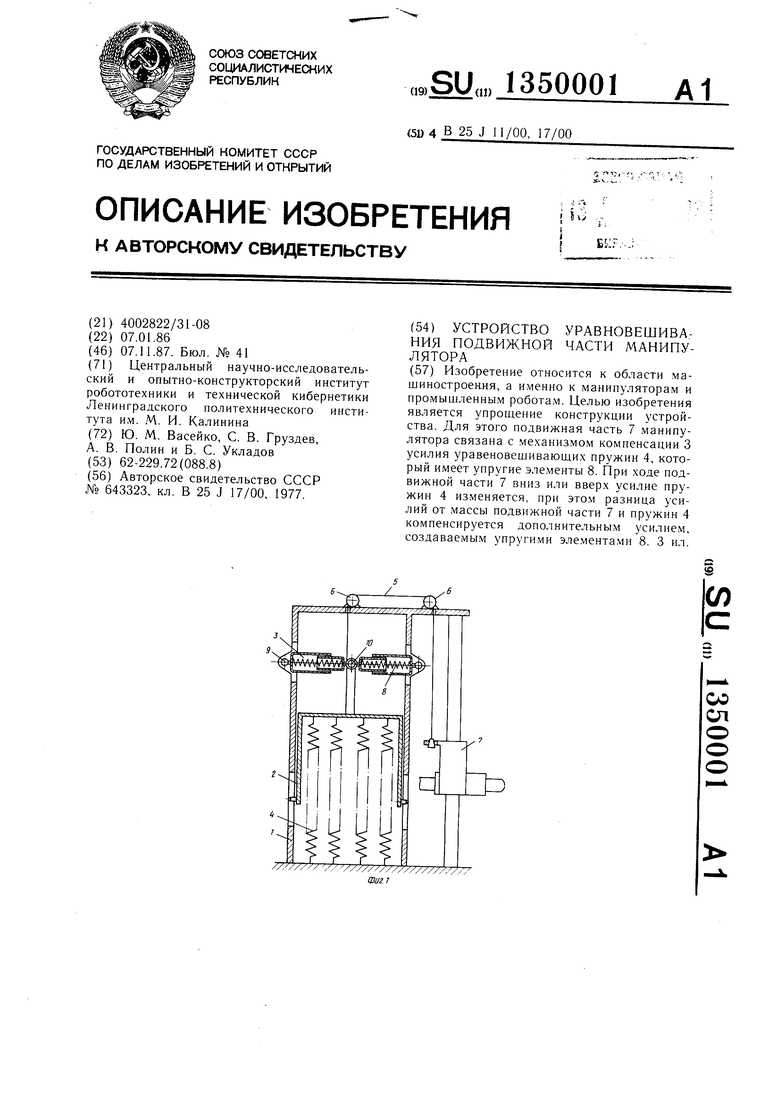
| Устройство вертикального перемещения | 1977 |
|
SU643323A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
