Изобретение относится, к машиностроению и может найти применение в промышленных роботах для гибких производсвтён- ных систем.
Цель изобретения - расширение технологических возможностей и улучшение динамических свойств манипулятора путем выполнения нескольких различных операций по перемешению механических рук с одновременным уравновешиванием их масс.
Усилие на штоке 10 передается на каждую каретку 4 поровну, разгружая приводы 5 от веса кареток 4 с установленными на них руками. При этом каретки 4 могут находиться на разной высоте на основании 1. При выполнении различных операций перемещения полезного груза обе каретки 4 перемеш,аются в различных направлениях и с различными скоростями (например, одна каретка неподвижна, а другая перемеш,ается
На фиг.1 показан манипулятор, общий Q вверх или вниз, или каретки перемещаются
20
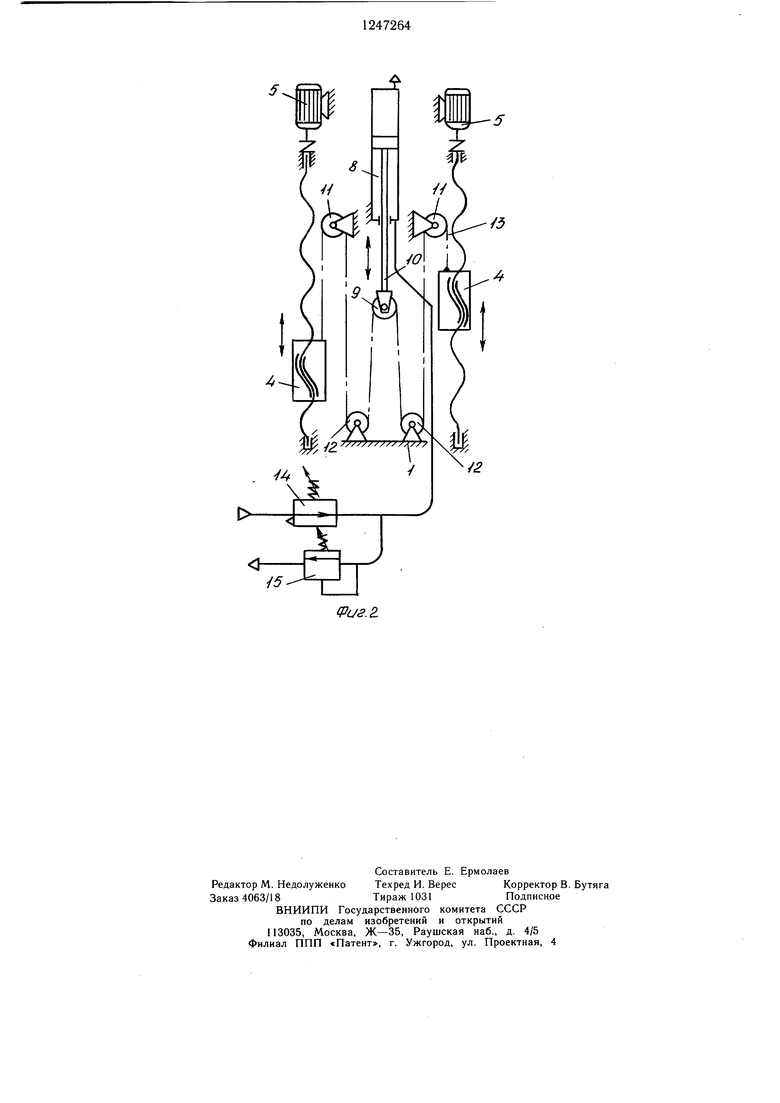
вид, в аксонометрии, на фиг.2 - его кинематическая схема.
Манипулятор содержит основание 1, смонтированное на механизме поворота 2. На основании 1 установлены направляющие 3, по которым перемещаются каретки 4, снабженные индивидуальными приводами вертикального перемещения 5. На каретках закреплены механические руки 6 с захватами 7. Для уравновешивания веса рук 6 и обеспечения их независимого перемещения одна от другой установлен механизм уравновешивания, который состоит из силового цилиндра 8, блока 9, закрепленного на штоке 10 силового цилиндра 8, неподвижных блоков 11 и 12, установленных на основании 1, и гибкого элемента 13. Последний 25 соединен с каретками 4 и проходит через блоки 11 концами 12 и 9.
Для управления давлением в штоковой полости силового цилиндра 8 предназначен редуктор 14 и предохранительный клапан 15. Другая полость силового цилиндра 8 30 сообщена с атмосферой.
в одном направлении с разными скоростями и т. п.). При этом шток 10 перемещается вверх или вниз. Сила натяжения ветвей гибкого элемента 13 остается постоянной под действием постоянного давления в штоко- 15 вой полости силового цилиндра 8, обеспечиваемого редуктором 14 и предохранительным клапаном 15. При ходе штока 10 вниз происходит сбрасывание избытка сжатого воздуха из щтоковой полости силового цилиндра 8 через предохранительный клапан 15, который отрегулирован на такое же давление, что и редуктор 14, этим самым обеспечивается постоянство давления в упомянутой штоковой полости.
Редуктор 14 и предохранительный клапан 15 регулируется в общем случае на такое давление, чтобы усилие на штоке 10 силового цилиндра 8 было равно весу обеих кареток 4 с установленными на них руками 6.
Формула изобретения
Манипулятор работает следующим образом.
В штоковую полость силового цилиндра 8 подают сжатый воздух постоянного давле- 35 ния, при этом происходит натяжение гибкого элемента 13. Усилие на штоке 10 передается через гибкий элемент 13 кареткам 4, уравновешивая вес кареток с установленными на них руками.
При выполнении одинаковых операций по величине вертикального перемещения полезного груза обе каретки 4 перемещаются синхронно вверх или вниз от индивидуальных приводов 5. При этом щток 10 силового цилиндра 8 вместе с блоком 9 перемещается соответственно вверх или вниз, натягивая обе ветви гибкого элемента 13.
.,. 40
45
Усилие на штоке 10 передается на каждую каретку 4 поровну, разгружая приводы 5 от веса кареток 4 с установленными на них руками. При этом каретки 4 могут находиться на разной высоте на основании 1. При выполнении различных операций перемещения полезного груза обе каретки 4 перемеш,аются в различных направлениях и с различными скоростями (например, одна каретка неподвижна, а другая перемеш,ается
вверх или вниз, или каретки перемещаются
в одном направлении с разными скоростями и т. п.). При этом шток 10 перемещается вверх или вниз. Сила натяжения ветвей гибкого элемента 13 остается постоянной под действием постоянного давления в штоко- вой полости силового цилиндра 8, обеспечиваемого редуктором 14 и предохранительным клапаном 15. При ходе штока 10 вниз происходит сбрасывание избытка сжатого воздуха из щтоковой полости силового цилиндра 8 через предохранительный клапан 15, который отрегулирован на такое же давление, что и редуктор 14, этим самым обеспечивается постоянство давления в упомянутой штоковой полости.
Редуктор 14 и предохранительный клапан 15 регулируется в общем случае на такое давление, чтобы усилие на штоке 10 силового цилиндра 8 было равно весу обеих кареток 4 с установленными на них руками 6.
Формула изобретения
30
5
0
Манипулятор, содержащий основание, установленные на нем с возможностью вертикального перемещения механические руки с приводом, отличающийся тем, что, с целью расширения технологических возможностей и улучщения динамических свойств, механические руки установлены на основании с возможностью их независимого перемещения от соответствующих приводов и снабжены механизмом уравновешивания, выполненным в виде установленного на основании силового цилиндра и передачи с гибкой связью, включающей в себя блоки, один из которых установлен на штоке силового цилиндра, а другие - на основании, и гибкий элемент, закрепленный своими концами на корпусах механических рук и огибающий указанные блоки.
5
5
(Риг. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Устройство для отделения листа от стопы и подачи его в зону обработки | 1985 |
|
SU1338940A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Манипулятор | 1986 |
|
SU1409578A1 |
| Манипулятор | 1984 |
|
SU1207754A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
Изобретение относится к машиностроению, в частности к промышленным роботам, имеющим механические руки с приводами их независимого вертикального перемещения. Целью изобретения является рас- щирение технологических возможностей и улучщение динамических свойств. Манипулятор имеет две механические руки 6, установленные на основании 1 с возможностью их независимого вертикального перемещения от приводов 5, и механизм уравновешивания рук, выполненный в виде установленного на основании 1 силового цилиндра 8 и передачи с гибкой связью, включающей в себя блоки, один из которых установлен на штоке силового цилиндра, а другие - на основании, и гибкий элемент, закрепленный своими концами на механических руках. 2 ил. (Л to 1 IsS О) Фиг.1
| Промышленный робот | 1982 |
|
SU1033309A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
