(54) УРАВНОВЕШЕННЫЙ МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| Уравновешенный манипулятор | 1986 |
|
SU1400874A1 |
| Манипулятор | 1982 |
|
SU1049414A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Рука манипулятора | 1987 |
|
SU1431924A1 |
| Сбалансированный манипулятор | 1987 |
|
SU1423367A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| Уравновешенный манипулятор | 1983 |
|
SU1119971A1 |
| Манипулятор | 1984 |
|
SU1284822A1 |
1
Изобретение относится к машиностроению . и может быть использовано в погрузочных манипуляторах и промышленных роботах.
Известен уравновешенный манипулятор, со держащий шарнирно рычажный механизм пантографа и пружину, связанную одним концом с ведущим звеном пантографа, а другим - с гибким злементом трособлочной системь, причем ведущее звено пантографа шарнирно связано с кареткой вертикального перемещения осью. Один из блоков трособлочной системы смонтирован на оси шарнирной связи каретки с ведущим звеном пантографа, а второй - на каретке, причем гибкий злемент трособлочной системы охватывает блоки и связан с ведущим звеном пантографа 1 .
Недостатком манипулятора является невозможность уравновешивания грузов в большом диапазоне их веса, что ухудшает динамические характеристики манипулятора.
Цель изобретения - улучшение динамических характеристик.
Поставленная цель достигается тем, что в уравновешенном манипуляторе, имеющем шарнирно-рычажный механизм пантографа, ведущее звено которого шарнирно связано с кареткой н механизм уравновешивания, имеющий пружину, связанную с одним из звеньев пантографа дополнительно введена плат. форма, установленная на одном из звеньев пантогртфа, и зубчатая передача с передаточ Q ным отношением равным 1:2, причем шестерня зубчатой передачи жестко закреплена на каретке и шарнирно - в сочленении звеньев пантографа, а колесо зубчатой передачи шарнирно связано со звеном пантогра, 5 фа, несущим пружину механизма . уравновешивания, при зтом на указанном колесе зксцентрично расположен дополнительно введенный ролик, предназначенный для взаимодействия с платформой.
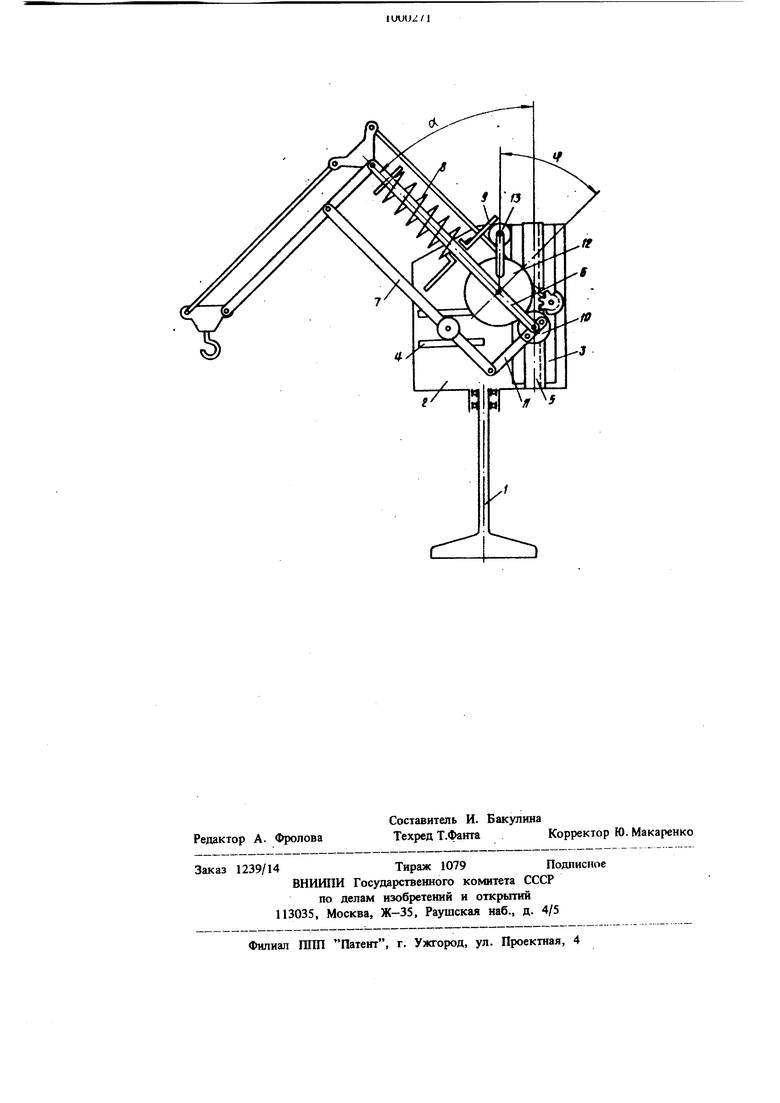
20 На чертеже представлен предлагаемый урав новеи1енный манипулятор, общий вид.
На колонне 1 в ее верхней части установ лен корпус 2, на стенке которого предусмоТ рены вертикальные направляющие 3 и горизонтальные направляющие 4. В вертикальных направляющих на роликах установлена каретка 5, шарнирно связанная с ведущим звеном 6 шарнирно-рычажного механизма пантографа. Каретка связана с приводом вертикального перемещения (не показан).
На оси рычага 7 установлен ролик, который перемещается в горизонтальных направляющих 4. Пружина 8 механизма уравновешивания установлена на ведущем звене 6 пантографа и. одним концом закреплена на нем, а другой конец закреплен на подвижной платформе 9.
Шестерня 10 зубчатой передачи жестко закреплена на каретке 5 и шарнирно - в соч ленении звеньев 6 и 11 пантографа. Колесо 12 зубчатой передачи с эксцентрично расположенным на нем роликом 13 шарнирно свя зано со звеном 6 пантографа. Из условия равновесия механической систе мы следует, что соотношение между углами а И С должно быть Ч где а угол отклонения звена 6 пантографа от вертикали; cf - угол поворота колеса 12 зубчатой передачи относительно звена 6. Это условие достигается применением зубчатой передачи с передаточным отношением 1 :2. Устройство работает следующим образом. В исходном положении пружина находится в свободном состоянии. При повороте звена 6 на угол а колесо 12, увлекаемое звеном 6, обкатываясь по щестерне 10, поворачивается на угол if на этот же угол поворачивается и ролик 13, ко-35 кл.
торый действуя на подвижную платформу 9, вызывает сжатие пружины. Усилие сжатия пружины является уравновешивающим.
Таким образом, применение в механизме уравновешивания зубчатой передачи повышает точность и надежность работы манипулятора и дает возможность регулировки его механизма уравновешивания.
Формула изобретения
Уравновешенный манипулятор, содержащий шарнирно-рычажный механизм пантографа, ведуш звено которого шарнирно связано с ка реткой, и механизм уравновешивания, имеющий пружину, связанную с одним из звеньев пантографа, отличающийся тем, что, с целью улучшения динамических характеристик, он снабжен платформой, установленной на одном из звеньев пантографа, и зубчатой передачей с передаточным отношением равным 1:2, причем шестерня зубчатой передачи жестко закреплена на каретке и щарнирно - в сочленении звеньев пантографа, а колесо зубчатой передачи шарнирно связано со звеном пантографа, несущим пружину механизма уравновешивания, при зтом на указанном колесе эксцентрично расположен дополнительно введенный ролик, предназначенный для взаимодействия с платформой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 848350, В 25 J 11/00, 1979.
