Изобретение относится к механизации погрузочно-разгрузочных работ и предназначено для использования при замене грузозахватных приспособлений на самоуравновешивающихся манипуляторах.
Цель изобретения - повышение производительности труда, безопасности и удобства обслуживания.
На фиг. 1 изображен сбалансированный манипулятор; на фиг. 2 - узел ,1 на фиг. 1; разрез,- на фиг. 3 - вид А на фиг. 2; на фиг. 4 - пневматическая схема управления манипулятором, на фиг. 5 - схема сил, действующих на jманипулятор; на фиг. 6 - исходное положение,- на фиг. 7 - манипулятор, захват штатного груза; на фиг. 8 - то же, освобождение от гру-
зозахватного приспособления, на фиг. 9 - то же, после снятия грузозахватного приспособления; на фиг. 10 то же, закрепление нового грузозахватного приспособления; на фиг.11 - освобождение манипулятора от штатного груза; на фиг0 12 - манипулятор с новым грузозахватным приспособлением.
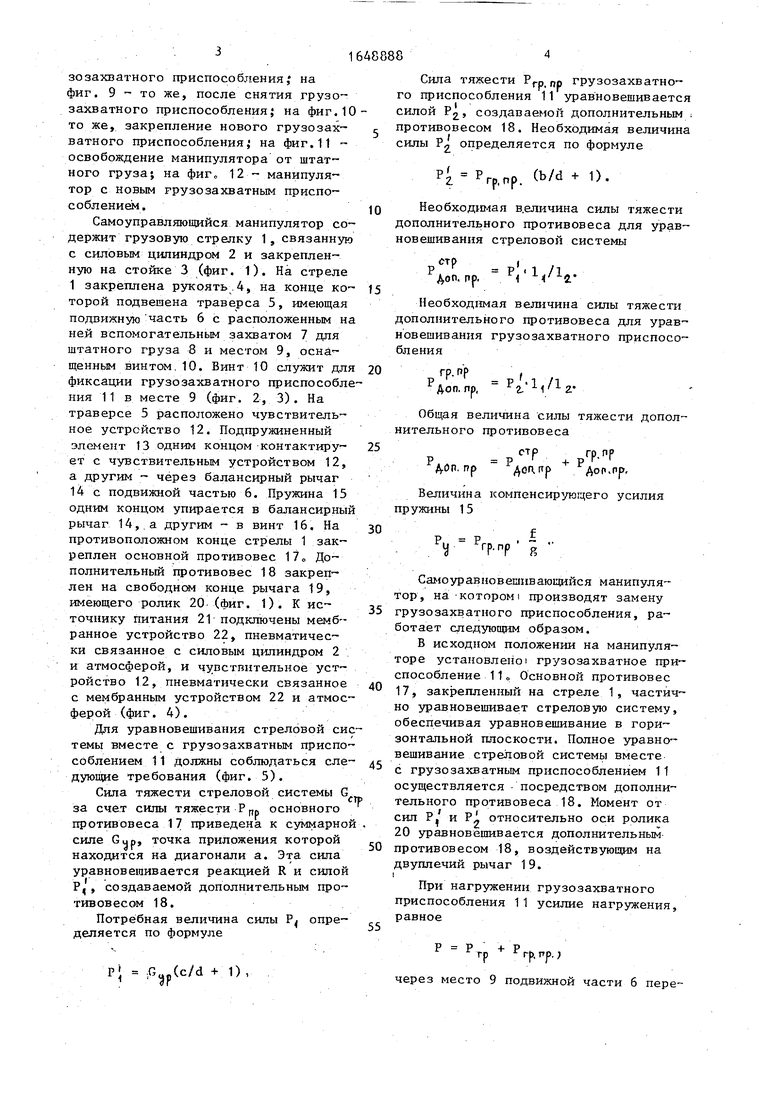
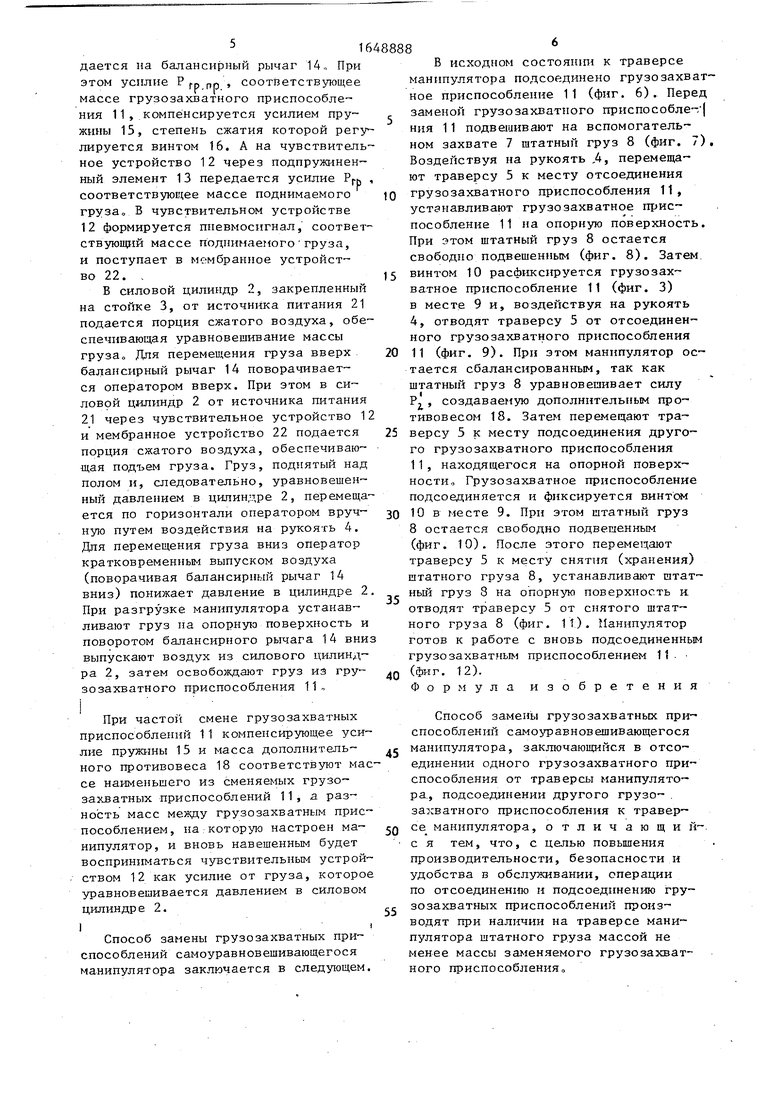
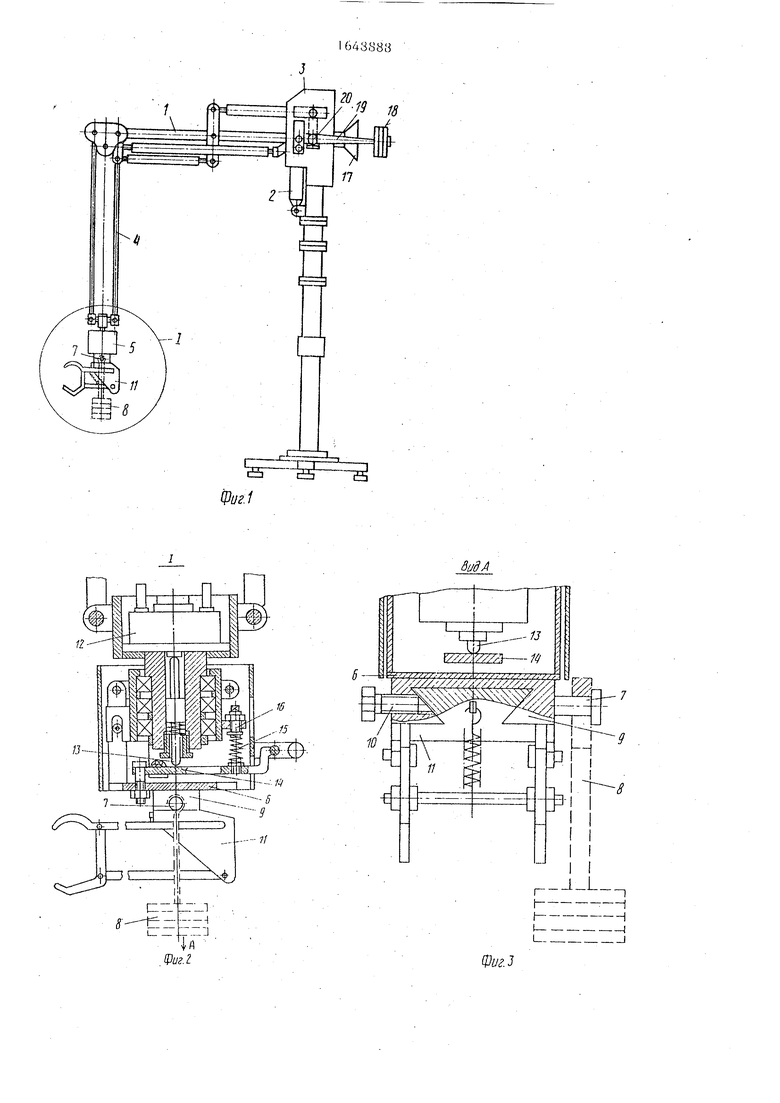
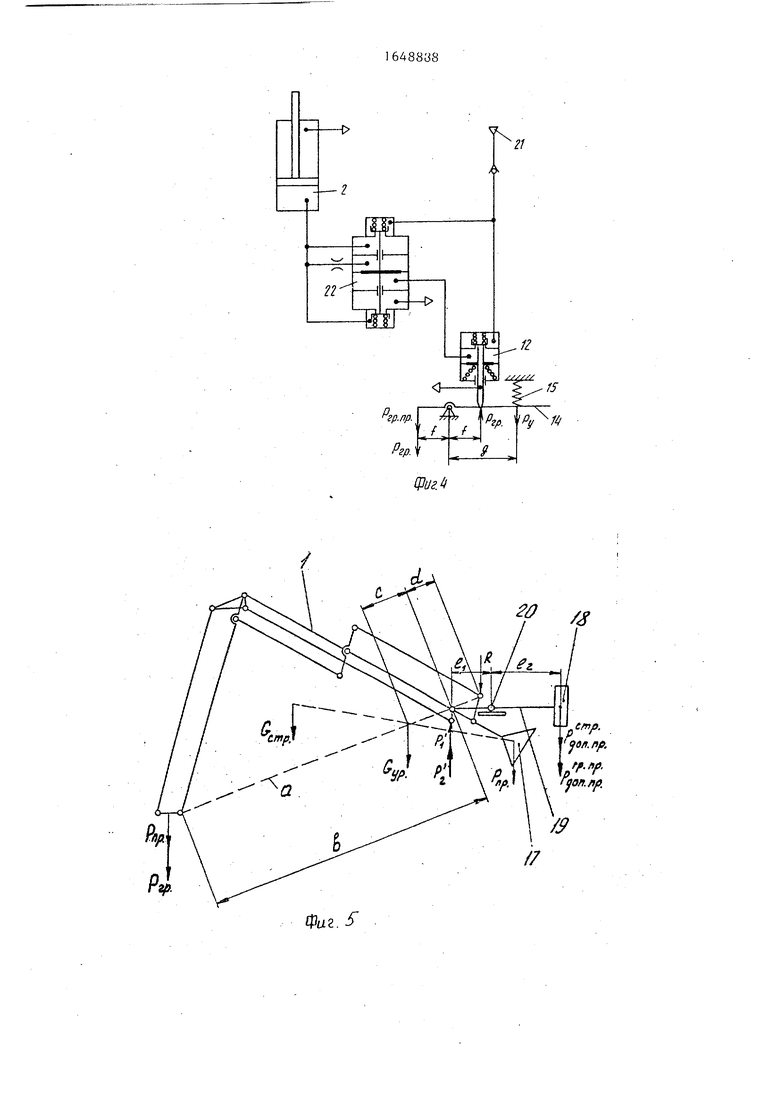
Самоуправляющийся манипулятор содержит грузовую стрелку 1 , связанную с силовым цилиндром 2 и закрепленную на стойке 3 (фиг. 1). На стреле 1 закреплена рукоять 4, на конце которой подвешена траверса 5, имеющая подвижную часть 6 с расположенным на ней вспомогательным захватом 7 для штатного груза 8 и местом 9, оснащенным винтом 10. Винт 10 служит для фиксации грузозахватного приспособления 11 в месте 9 (фиг. 2, 3). На траверсе 5 расположено чувствительное устройство 12. Подпружиненный элемент 13 одним концом контактирует с чувствительным устройством 12, а другим - через балансирный рычаг 14 с подвижной частью 6. Пружина 15 одним концом упирается в балансирный рычаг 14, а другим - в винт 16. На противоположном конце стрелы 1 закреплен основной противовес 17 Дополнительный противовес 18 закреплен на свободном конце рычага 19, имеющего ролик 20 (фиг. 1). К источнику питания 21 подключены мембранное устройство 22, пневматически связанное с силовым цилиндром 2 и атмосферой, и чувствительное устройство 12, пневматически связанное с мембранным устройством 22 и атмосферой (фиг. 4).
Для уравновешивания стреловой системы вместе с грузозахватным приспособлением 11 должны соблюдаться следующие требования (фиг. 5).
Сила тяжести стреловой системы G за счет силы тяжести Р„р основного
«
противовеса 17 приведена к суммарной силе Gup, точка приложения которой находится на диагонали а. Эта сила уравновешивается реакцией R и силой Р.1, создаваемой дополнительным противовесом 18.
Потребная величина силы Р определяется по формуле
,(c/d + 1) ,
Р G
ЭР
Сила тяжести РГп. Пр грузозахватного приспособления 11 уравновешивается силой Р, создаваемой дополнительным противовесом 18. Необходимая величина силы РЈ определяется по формуле
(b/d + 1).
Pi
гр.пр.
10
Необходимая в.еличина силы тяжести дополнительного противовеса для уравновешивания стреловой системы
стр |
Р... - Р
i,/i
Ч.
Доп. pp.
Необходимая величина силы тяжести дополнительного противовеса для уравновешивания грузозахватного приспособления
20
гр.пр Доп. по,
-pi-vv
Общая величина силы тяжести дополнительного противовеса
Р
стр
+ р
гр.пр
д.оп. дсапр дор.прВеличина компенсирующего усилия пружины 15
V
-гр.пр
f
8
35
40
55
Самоуравновеиивающийся манипулятор, на котором: производят замену грузозахватного приспособления, работает следующим образом.
В исходном положении на манипуляторе установлено грузозахватное приспособление 11„ Основной противовес 17, закрепленный на стреле 1, частично уравновешивает стреловую систему, обеспечивая уравновешивание в горизонтальной плоскости. Полное уравновешивание стреловой системы вместе
45 с грузозахватным приспособлением 11 осуществляется посредством дополнительного противовеса 18. Момент от сил Р/ и Р относительно оси ролика 20 уравновешивается дополнительным
50 противовесом 18, воздействующим на
двуплечий рычаг 19.
I
При нагружении грузозахватного приспособления 11 усилие нагружения, равное
Р Р
+ Р,
гр rf, пр.; через место 9 подвижной части 6 передается на балансирный рычаг 14„ При этом усилие Р Гр пр , соответствующее массе грузозахватного приспособления 11, компенсируется усилием пружины 15, степень сжатия которой регулируется винтом 16. А на чувствительное устройство 12 через подпружиненный элемент 13 передается усилие Ргь соответствующее массе поднимаемого груза, В чувствительном устройстве 12 формируется пневмосигнал, соответствующий массе поднимаемого груза, и поступает в мембранное устройство 22.
В силовой цилиндр 2, закрепленный на стойке 3, от источника питания 21 подается порция сжатого воздуха, обеспечивающая уравновешивание массы груза Для перемещения груза вверх балансирный рычаг 14 поворачивается оператором вверх. При этом в силовой цилиндр 2 от источника питания 21 через чувствительное устройство 12 и мембранное устройство 22 подается порция сжатого воздуха, обеспечивающая подъем груза. Груз, поднятый над полом и, следовательно, уравновешенный давлением в цилиндре 2, перемещается по горизонтали оператором вручную путем воздействия на рукоять 4. Для перемещения груза вниз оператор кратковременным выпуском воздуха (поворачивая балансирннй рычаг 14 вниз) понижает давление в цилиндре 2 При разгрузке манипулятора устанавливают груз на опорную поверхность и поворотом балансирного рычага 14 вниз выпускают воздух из силового цилиндра 2, затем освобождают груз из грузозахватного приспособления 11 „
I
При частой смене грузозахватных
приспособлений 11 компенсирующее усилие пружины 15 и масса дополнительного противовеса 18 соответствуют массе наименьшего из сменяемых грузозахватных приспособлений 11, а разность масс между грузозахватным приспособлением, на которую настроен манипулятор, и вновь навешенным будет восприниматься чувствительным устройством 12 как усилие от груза, которое уравновешивается давлением в силовом цилиндр е 2.
Ii
Способ замены грузозахватных приспособлений самоуравновешивающегося манипулятора заключается в следующем.
0
5
0
5
В исходном состоянии к траверсе манипулятора подсоединено грузозахватное приспособление 11 (фиг. 6). Перед заменой грузозахватного приспособле--| ния 11 подвешивают на вспомогательном захвате 7 штатный груз 8 (фиг. 7). Воздействуя на рукоять ,4, перемещают траверсу 5 к месту отсоединения грузозахватного приспособления 11, устанавливают грузозахватное приспособление 11 на опорную поверхность. При том штатный груз 8 остается свободно подвешенным (фиг. 8). Затем винтом 10 расфиксируется грузозахватное приспособление 11 (фиг. 3) в месте 9 и, воздействуя на рукоять 4, отводят траверсу 5 от отсоединенного грузозахватного приспособления 11 (фиг. 9). При этом манипулятор остается сбалансированным, так как штатный груз 8 уравновешивает силу Р, создаваемую дополнительным противовесом 18. Затем перемещают траверсу 5 к месту подсоединения другого грузозахватного приспособления 11, находящегося на опорной поверхностно Грузозахватное приспособление подсоединяется и фиксируется винтом 10 в месте 9. При этом штатный груз 8 остается свободно подвешенным (фиг. 10). После этого перемещают траверсу 5 к месту снятия (хранения) штатного груза 8, устанавливают штатный груз 8 на опорную поверхность и. отводят траверсу 5 от снятого штатного груза 8 (фиг. 11). Манипулятор готов к работе с вновь подсоединенным грузозахватным приспособлением 11 0 (фиг. 12).
Формула изобретения
Способ замены грузозахватных приспособлений самоуравновешивающегося
j манипулятора, заключающийся в отсоединении одного грузозахватного приспособления от траверсы манипулятора, подсоединении другого грузозахватного приспособления к травер-
0 се манипулятора, отличающий- с я тем, что, с целью повышения производительности, безопасности и удобства в обслуживании, операции по отсоединению и подсоединению гру-
е зозахватных приспособлений производят при наличии на траверсе манипулятора штатного груза массой не менее массы заменяемого грузозахватного приспособления,,
0
5
19 18
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1542791A2 |
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| Манипулятор | 1985 |
|
SU1502292A2 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| Башенный кран | 1978 |
|
SU775043A1 |
| Кран-манипулятор | 1984 |
|
SU1253942A1 |
| МОНТАЖНОЕ НАВЕСНОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2235672C2 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |
| Уравновешивающее подъемное устройство | 1984 |
|
SU1232637A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
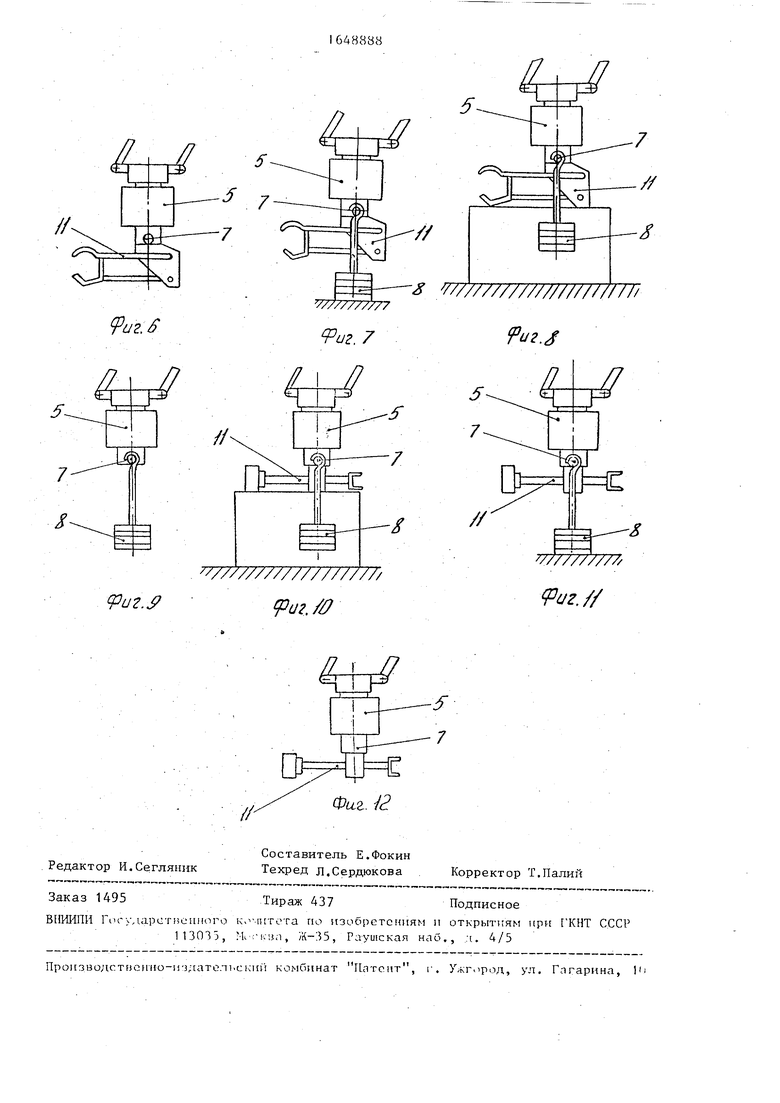
Изобретение касается механизации погрузочно-разгрузочных работ. Целью изобретения является повышение Производительности, безопасности и удобства в обслуживании. В исходном состоянии к траверсе манипулятора подсоединено грузозахватное приспособление 11. Перед заменой грузозахватного приспособления 11 подвешивают на вспомогательном захвате 7 штатный груз 8. Воздействуя на рукоять. 4, перемещают траверсу 5 к месту отсоединения грузозахватного приспособления 11 и устанавливают его на опорную поверхность. При э,том штатный груз 8 остается свободно подвешенным. Затем винтом расфик-- сируется грузозахватное приспособление 11. Воздействуя на рукоять 4, отводят траверсу 5 от отсоединенного грузозахватного приспособления 11. При этом манипулятор остается сбалансированным, так как штатный груз 8 уравновешивает дополнительный противовес 18. Далее перемещают траверсу 5 к месту подсоединения другого грузозахватного приспособления 11, которое подсоединяется и фиксируется винтом. При этом штатный груз 8 остается свободно подвешенным. После этого перемещают траверсу 5 к месту снятия штатного груза 8, устанавливают его на опорную поверхность и отводят траверсу 5 от снятого штатного груза 8. Манипулятор готов к работе с вновь подсоединенным грузозахватным приспособлением 11. 12 ил. Ј (/) % 00 00 00 100
ВидА
б-я
..
|.j
I|
)i
i1
ii
ФигЗ
Р
Фиг. 5
гр.пр.
Ж 77I
Ъ
V4
0
/3
/3
//
////77///////////// Put.3(рм/#
/7 i Я
tq U
Я
Фаг. -12
- ///////////////ft///// U2.J
/
//
//////////// Фиг.//
| Уравновешивающее подъемное устройство | 1984 |
|
SU1216136A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
