Изобретение относится к станкостроению и может быть использована при зу- бошлифовании абразивным червяком.
Цель изобретения - повышение точности правки путем упрощения настройки устройства.
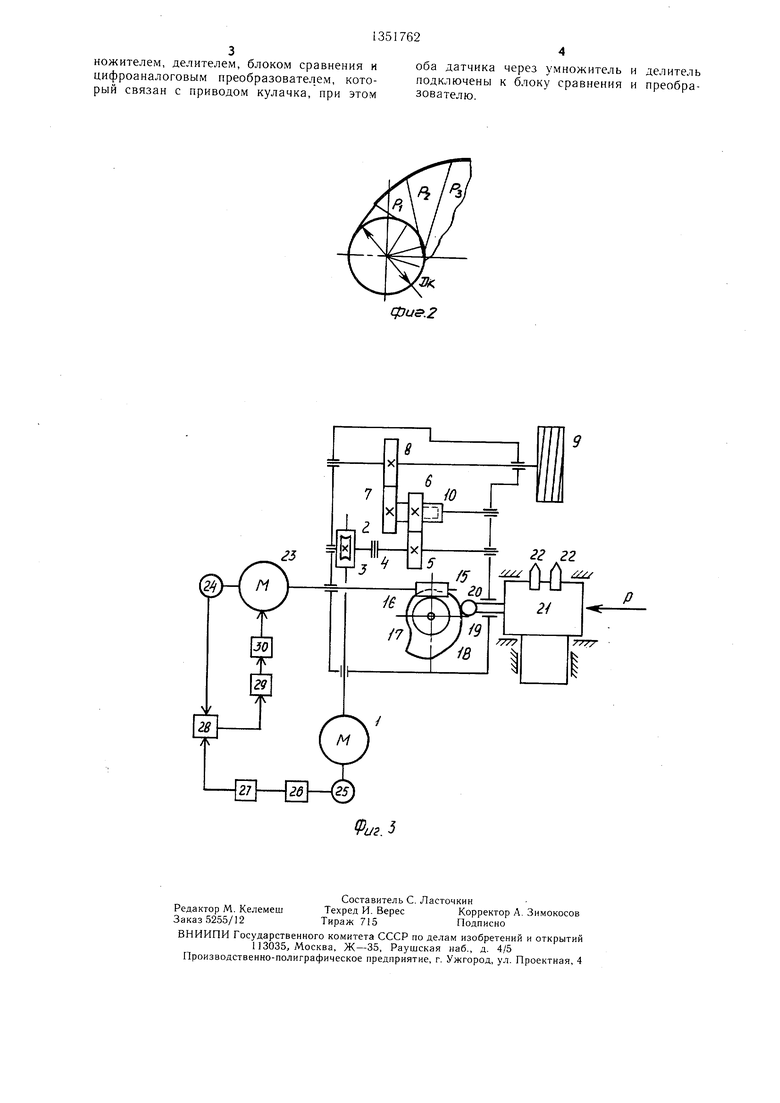
На фиг. 1 представлена схема устройства, где взаимосвязь ветвей вращательного движения осуществляется с помощью гитары сменных щестерен; на фиг. 2 - рабочий профиль плоского кулака, выполненный по эвольвенте; на фиг. 3 - вариант устройства с использованием дополнительного привода.
Устройство содержит привод 1 абразивного червяка, червячную передачу 2-3, муфту 4, зубчатые передачи с постоянным передаточным отнощением с шестернями 5-8; абразивный червяк 9, делительное устройство 10 (подробно не показано), гитару сменных щестерен 11 -14; червяк 15, червячное колесо 16, на оси 17 которого закреплен кулак 18. Кулак 18 посредством ролика 19 и толкателя 20 связан с кареткой 21, на которой установлен правящий инструмент 22. Каретка 21 поджимается к кулаку 18 силой Р. Ветвь вращательного движения состоит из щестерен 12, 11, 6, 7 и 8. Ветвь поступательного движения кинематической цепи состоит из щестерен 13 и 14, червяка 15, червячного колеса 16 и кулака 18. Другой вариант устройства, кроме перечисленных элементов, содержит привод 23 кулачка, установленный на входе червячной передачи 15-16, импульсный датчик 24 по- ложения указанного привода, второй импульсный датчик 25 положения привода абразивного червяка, регулируемый умножи- тель 26, регулируемый делитель 27, блок 28 сравнения, цифроаналоговый преобразователь 29, регулятор 30.
Устройство работает следующим образом. Движение от привода 1 передается на червяк и червячную щестерню 3 червячной передачи 2-3, далее через электромагнитную муфту 4, постоянные щестерни 5-8 на абразивный червяк 9 и одновременно на гитару настройки сменных щестерен 11 -14, червяк 15, червячное колесо 16, на оси 17 которого закреплен кулак 18. Кулак 18 может быть выполнен замкнутым (в этом случае его профилирующая часть выполнена по эвольвенте) и непрерывно вращающимся в одну сторону либо иметь возможность реверсироваться и в этом случае быть незамкнутым с эвольвентным профилем. Рабочий профиль кулака выполнен в виде эвольвенты, диаметр основной окружности которой равен DK, а радиусы развернутости - рк. Кулак 18 воздействует на ролик 19 толкателя 20 и перемещает каретку 21 с правящими инструментами 22. Настройка гитары, состоящей из щестерен 11 -14, осуществляется так, чтобы за один оборот абразивного червяка 9 каретка 21 переместилась на величину, равную или кратную шагу абразивного червяка.
В другом варианте импульсный датчик 25 положения привода абразивного червяка генерирует определенное количество импульсов. Эти импульсы поступают в регулируемый умножитель 26 и регулируемый делитель 27, а затем - в блок 28 сравнения, где сравниваются с последовательностью импульсов, поступающих с датчика 24
червяка привода кулака. Умножитель 26 и делитель 27 настраивают так, чтобы с учетом заданного соотнощения скоростей вращения абразивного червяка 9 и червяка привода кулака число импульсов, приходящих на
с вход блока 28 сравнения от датчиков 24 и 25, было одинаково. В случае несоответствия заданных скоростей или перемещений в блоке сравнения формируется сигнал рассогласования, который подается в цифроаналоговый преобразователь 29, а за0 тем в регулятор 30, управляющий вторым приводом 23, вращаюш,и.м червяк 15 кулака 18.
Возможны варианты выполнения кулака, где рабочая часть выполняется по архи- 5 медовой спирали или шнтовой линии. Однако эти поверхности трудно выполнить с высокой точностью.
Рабочий профиль кулака с высокой степенью точности можно выполнить по эволь- 0 венте, применив известный метод обката. Применение этого метода позволяет исключить циклические погрешности профиля и получить на профиле кулака погрешность, на превыщающую 2-3 мкм на всей рабочей длине.
35
Формула изобретения
1. Устройство для правки абразивного червяка, содержащее привод абразивного
червяка, каретку с правящим инструментом, установленную с возможностью поступательного движения и соединенную с валом абразивного червяка посредством кинематической цепи, состоящей из ветвей поступательного и вращательного движений, отличающееся тем, что, с целью повышения точности правки, устройство снабжено введенными в ветвь поступательного движения червячной передачей и плоским кулачком, который закреплен на оси червячного колеса с возможностью взаимодействия с кареткой, при этом профиль кулачка выполнен по эвольвенте.
2. Устройство по п. 1, отличающееся тем, что оно снабжено введенным в ветвь поступательного движения приводом кулачка, импульсным датчиком положения червяка, вторым импульсным датчиком, связанным с приводом абразивного червяка, умножителем, делителем, блоком сравнения и цифроаналоговым преобразователем, который связан с приводом кулачка, при этом
оба датчика через умножитель и делитель подключены к блоку сравнения и преобразователю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для правки абразивного червяка | 1986 |
|
SU1351761A1 |
| Устройство для управления правкой абразивного червяка | 1986 |
|
SU1357203A1 |
| ЧЕРВЯЧНЫЙ ИНСТРУМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ, ОБОРУДОВАНИЕ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ И ЭКСПЛУАТАЦИИ | 1998 |
|
RU2169061C2 |
| Автомат для вышлифовки винтовых поверхностей и заточки зубьев на цилиндрической поверхности и торце концевого инструмента | 1984 |
|
SU1172678A1 |
| Способ шлифования зубчатых колес на зуборезном стайке | 1937 |
|
SU64190A1 |
| СПОСОБ ПРАВКИ АБРАЗИВНОГО КРУГА | 2013 |
|
RU2538519C2 |
| Способ изготовления конических зубчатых колес с зубцами эвольвентного очертания в продольном направлении | 1939 |
|
SU59129A1 |
| Устройство для правки многозаходных абразивных червяков | 1973 |
|
SU549329A1 |
| Станок для обработки кольцевого желоба переменного профиля | 1988 |
|
SU1645108A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
Изобретение относится к станкостроению и может быть применено в зубо- шлифовальных станках, работающих абразивным червяком. Цель изооретения - повышение точности правки за счет упрощения настройки устройства. Устройство содержит поступательно движущуюся каретку 21, которая связана с вращающимся абразивным червяком 9 посредством кинематической цепи. Кинематическая цепь состоит из ветви вращательного и поступательного движений. Устройство снабжено червячной передачей (2-3) и плоским кулачком 18, установленным в цепи поступательного движения. Кулачок 18 с.монтирован на оси, 17 червячного колеса 16. Профиль кулачка 18 выполнен по эвольвенте. 1 з.п. ф-лы. 3 ил. о СО Са О5 to cpusi
фи&.2
2г гг
6
7777
Составитель С. Ласточкин
Редактор М. КелемешТехред И. ВересКорректор А. Зимокосов
Заказ 5255/)2Тираж 715Подписно
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Руководство М.: Станкоимпорт, 1981. | |||
