Изобретение относится к станкостроению и может быть использовано при изготовлении зубосдлифовальных станков с а бразивным червяком.
Цель изобретения - повьшение точности правки за счет исключения сменных шестерен.
На фиг. 1 показана схема устройства для управления правки; на фиг.2 схема блока деления на заходы.
Устройство содержит абразивный червяк 1, зубчатые передачи 2 и 3, червячную передачу 4 и 5, привод 6 вращения абразивного червяка при пра .ке, импульсный датчик 7 положения
круга, блок 8 деления на заходы, делитель 9 числа импульсов с переменным коэффициентом деления, задат чИк 10 коэффициента деления, делител 11 числа импульсов с постоянным коэффициентом деления, реверсивный счетчик 12, цифроаналоговый преобразователь 13 и тиристорный преобразовател
14,управляющий электродвигателем
15.Электродвигатель 15 через червячную передачу 16 и 17 передает вращение винту 18, перемещающему каретку
19с правящим инструментом. С кареткой жестко связан импульсный датчик
20линейных перемещений, сигнал с которого через умножители 21 и 22 подается на второй вход реверсивного счетчика 12. Позицией 23 обозначен угловой импульсный датчик, жестко связанный с электродвигателем 15. Он показан пунктиром и применяется в
том случае, когда импульсный датчик 20 линейных перемещений не используется. .
Показанный на фиг. 2 вариант схемы блока деления на заходы включает в себя коммутатор 24 и счетчик 25 с задатчиком 26 числа заходов. Коммутатор 24 имеет два управляющих входа 27 и 28. Первый управляющий вход 27 подключен к выходу счетчика 25, а второй управляющий вход 28 подключен к внешнему блокирующему устройству (не показано), вьщающему коман- ду на блокировку.
Устройство работает следующим образом.
Вал электродвигателя вращает ротор импульсного датчика 7, который генерирует определенное количество импульсов на каждый оборот абразивного червяка. Эти импульсы поступают через блок В деления на заходы в делитель 9, коэ1:Ьфициент деления кото-- рого устанавливается задатчиком 10. Импульсы на выходе делителя 9 с переменным коэффициентом деления в общем случае могут быть неравномерными во времени, поэтому для усреднения нерав номерности следования импульсов в схему включен делитель 11 с постоянным коэффициентом деления. После деления и усреднения импульсы поступают на суммирующий вход реверсивного счетчика 12, вычитающий вход которого соединен с импульсным датчиком 20 линейных перемещений, который генерирует определенное количество импульсов на каждый миллиметр перемещения каретки, умноженное на 5 и 4 (характеристики умножителей 21 и 22) Выходной код реверсивного счетчика 1 подается в цифроаналоговый преобразователь 13, на выходе которого формируется сигнал рассогласования, управляющий приводом перемещения каретки, . состоящим из тиристорного преобразователя 14 и электродвигателя 15.
В установившемся режиме каждый импульс, приходящий на суммирующий вход счетчика 12, вызывает такое перемещение каретки, при котором датчиком 20 генерируется один импульс, поступающий на вычитающий вход счетчика 12. В этом случае максимальная ошибка слежения (максимальное рассогласование) не превышает одной дискреты перемещения каретки. Соотношение скорости вращения круга и перемещения каретки (передаточное отношение цепи правки) определяется модулем профилируемого абразивного червяка m и числом его заходов k.
При повороте абразивного червяка 1 на оборот каретка должна переместиться на величину iTrnk мм, при этом датчик линейных перемещений выдает
nmk
--- импульсов, где D - дискретность
датчика в мм/имп. На суммирующий вход реверсивного счетчика должно поступать такое же число импульсов. Если число импульсов на 1 оборот датчика круга равно Z, передаточное отношение от абразивного червяка к датчику Z равно i и коэффициент деления делителя 11 равен q, то коэффициент деления делителя 9 должен быть установлен равным
„ Z ., . Z D iq i3 icrifpik
В том случае, когда используется угловой импульсный датчик 23, кото- рьА связан с винтом или червяком червячной передачи (на схеме датчик показан, пунктирной линией), коэффициент деления делителя 9 определяется соотношением
с 5iii-b-
Zji,
где Z - число импульсов датчика 7 абразивного червяка на 1 оборот; Z - число импульсов датчика 23
на 1 оборот;
5., - передаточное отношение от абразивного червяка 1 до датчика 7; ij - передаточное отношение от
. винта 18 до датчика 23; t - шаг винта 18; п - модуль абразивного червяка mj - модуль винта 18; k - число заходов абразивного
червяка;
q - коэффициент деления делителя 1 1 .
Блок деления на заходы В работает следующим образом (фиг. 2). Импульсы с датчика 7 поступают в делитель 9 через коммутатор 24, управляющий вход 27 которого подключен к выходу, счетчика 25, объем которого устанавливается задатчиком 26. Второй управляюр;ий вход 28 коммутатора соединен с внешним устройством, выдающим команду на блокировку. При поступлении команды на блокировку прохождение импульсов датчика 7 в делитель 9 прекращается и каретка останавливается. В это время идет деление на заходы. Коммутатор 24 переключает выход датчика 7 на вход счетчика 25, который после заполнени до объема, установленного задатчиком 26, переключает коммутатор 24 в первоначальное состояние. При этом возобновляется перемещение каретки.
5
0
5
0
5
0
5
взаимосвязанное с поворотом абразивного червяка. Таким образом, при делении на заходы импульсы с датчика 7 блокируются и подсчитываются счетчиком 25. При зтом круг продолжает вращаться, а каретка останавливается. При известном числе Z импульсов датчика 7 за 1 оборот абразивного червяка блокировка должна сниматься после того, как счетчик 25 зарегистрирует ,- импульсов, а абразивный червяк 1 повернется «а 1/k оборота.
Формула изобретения
1.Устройство для управления правкой абразивного червяка, содержащее привод абразивного червяка, правящий инструмент, установленный на каретке, связанной с валом абразивного червяка, отличающееся тем, что, с целью повьщгения точн ости правки, в него введены между приводом вращения червяка и приводом перемещения каретки соединенные последовательно импульсный датчик положения круга, блок деления на заходы, делитель числа импульсов с переменным коэффициентом деления, делитель числа импульсов с постоянным коэффициентом деления, реверсивный счетчик, цифроанало- говый преобразователь, задатчик коэффициента деления, соединенный с делителем числа импульсов с переменным коэффициентом деления, и импульсный датчик перемещения кареткиs связанный с вычитающим входом реверсивного счетчика.
2.Устройство по п. 1, отличающееся тем, что блок деления на заходы вьтолнен в виде счетчика, коммутатора и задатчика числа заходов, связанного со счетчиком,, при 3iTOM управляющие входы коммутатора связаны с выходом счетчика и внешней блокировкой, а выход - с входом счетчика.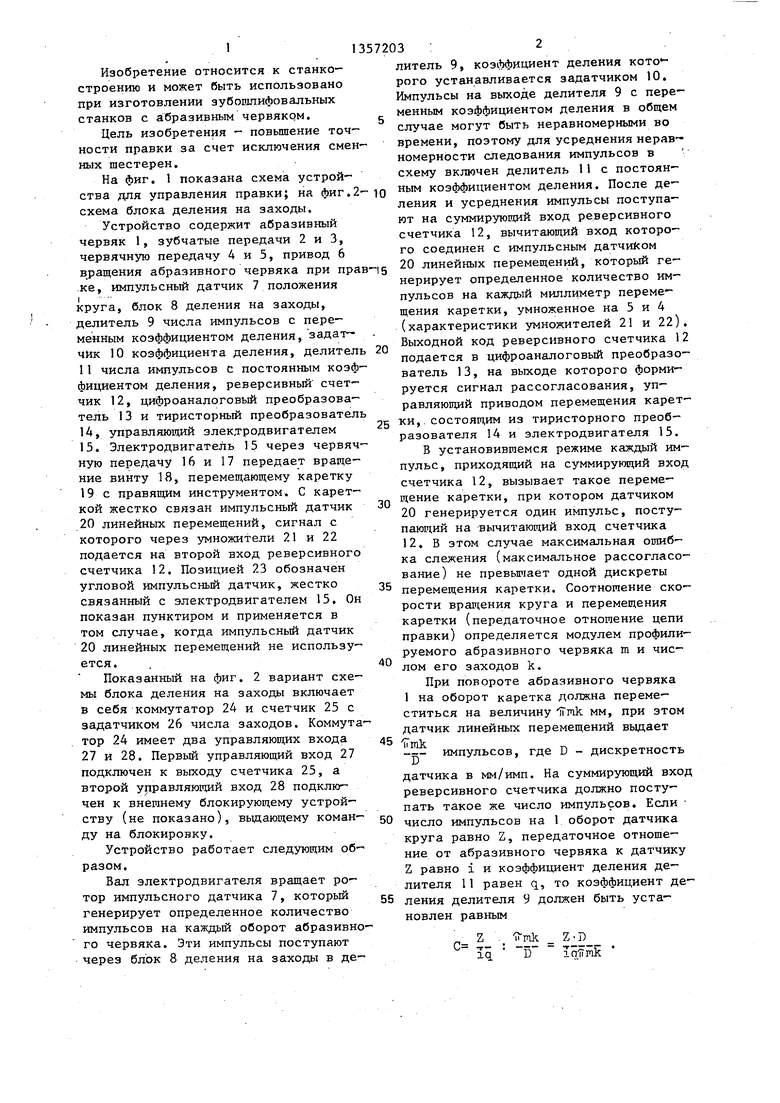
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство синхронной связи к зубообрабатывающему станку, работающему по методу обката | 1986 |
|
SU1392545A1 |
| Устройство для правки абразивного червяка | 1986 |
|
SU1351762A1 |
| Устройство для регулирования синхронногоХОдА зубООбРАбАТыВАющЕгО CTAHKA | 1978 |
|
SU822772A3 |
| Устройство для автоматической стабилизации скорости шлифования | 1982 |
|
SU1046077A1 |
| Автомат для шлифования винтовых канавок | 1985 |
|
SU1713778A1 |
| Цифровое устройство одноканального фазового управления вентильным преобразователем | 1974 |
|
SU674182A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Цифровой преобразователь линейных перемещений | 1991 |
|
SU1796882A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1982 |
|
SU1092015A1 |
| Устройство для управления станком для обработки косозубых изделий | 1978 |
|
SU833174A3 |
Изобретение относится к области станкостроения и может быть применено в зубошлифовальных станках, работающих абразивным червяком. Цель изобретения - повьшение точности правки за счет исключения сменных систем. Для этого между приводом вращения червяка и приводом перемещения каретки включена цепь, которая содержит импульсный датчик 7 положения круга, ./ . блок 8 деления на заходы, делитель 9 с переменным коэффициентом деления, делитель с постоянным коэффициентом деления, реверсивный счетчик 12, циф- роаналоговый преобразователь 13. Вход делителя 9 связан с задатчиком коэффициента деления. Импульсный датчик 20 линейного перемещения каретки связан с реверсивным счетчиком. Вал электродвигателя вращает ротор импульсного датчика 7, который генерирует определенное количество импульсов на каждьй оборот абразивного червяка. Эти импульсы поступают через блок 8 в делитель 9. После деления и усреднения импульсы поступают на суммирующий вход реверсивного счетчи ка 12. Датчик 20 генерирует определенное количество импульсов на каждый миллиметр перемещения каретки 19. На выходе цифроаналогового преобразователя 13 формируется сигнал управления приводом перемещения каретки. 1 3.п. ф-лы, 2 ил. (Л со фиг. 1
Фиг, 2
Редактор А.Ворович
Составитель А.Семенова Техред М.Ходанич
5929/12
Тираж 715.Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и откр« 1тий, 113035, Москва:, Ж-35, Раушская .наб., д. 4/5
Производственно полиграфическое предприятие, г. Ужгород, ул. Проектная, k
Корректор Л.Пилипенко (
| Кипятильник для воды | 1921 |
|
SU5A1 |
