зажимных роликов 35 и 36 в зависимости от формы захватываемой детали 37 изменяется перемещением втулки 21 по корпусу 2. При захвате детали 37 шток 1, служащий центральным пальцем, перемещается по стрелке относи1
Изобретение относится к машиностроению, в частности к захватным устройствам промьшленных роботов.
Целью изобретения является расширение технологических возможностей.
На чертеже изображено предлагаемое устройство, общий вид.
Захватное устройство состоит из поступательно перемещающегося штока 1 привода (не показан), по скользя- щей посадке установленного в корпусе 2 (место установки заштриховано), который одновременно служит центоаль ным зажимным пальцем и имеет на конце свободно вращающийся зажимньш ролик 3, на одной оси .4 с которым установлен независимо вращающийся приводной направляющий шкив 5 для замкнутого гибкого звена 6 (показано штрихпунктиром) Кроме того, по оси штока выполнена направляющая 7, в которой по скользящей посадке установлена ось 8, соединенная с пружинящим устройством 9 с регулируемой упругостью (не по- / казано) и несущая натяжной направляющий шкив 10. Посредством пальцев 11, 12 с корпусом шарнйрно соединены направляющие рычаги 13, 14, угол установки которых выполняет механизм ориентации, состоящий из рычагов 15, 16, шарниров 17-20, и поступательно перемещающейся по корпусу втулки 21, положение которой фиксируется зажимным болтом 22. Замкнутое гибкое звено, направляемое на корпусе шкивами 23 и 24, а на рабочих участках шкивами 25-28, несущее жестко зафиксированные зажимами 29 и 30 пальцы 31 и 32 с закрепленными на осях 33 и 34 зажимными элементами в виде свободно вращающихся роликов 35 и 36, захватывающих и центрирующих вращающуюся деталь 37,
тельно корпуса 2 и передает посредством замкнутого Гибкого звена 6, размещенного на шкивах, синхронное движение пальцам 31 и 32 до момента захвата детали 37 роликами 3, 35 и 36, 1 ил.
3
Захватное устройство работает следующим образом.
В исходном положении приводной шток 1, служащий центральным пальцем,
занимает положение относительно корпуса 2, при котором ось 4 зажимного ролика 3 и приводного шкива 5 совмещается с осями направляющих шкивов 23 и 24 замкнутого гибкого звена 6,
а пальцы 31 и 32, кинематически связанные со штоком 1 посредством замкнутого гибкого звена 6 на приводном шкиве 5, натяжном шкиве 10 и направляющих шкивах 23-28, занимает положение у шкивов 26 и 28 соответственно, что фиксируется зажимами 29 и 30, определяюи ими положение зажимных роликов 35 и 36, свободно вращающихся на осях 33 и 34. В исходном положеНИИ производится также регулировка натяжения замкнутого гибкого звена 6 как от провисания, так и на необходимое усилие захвата натяжным шкивом 10, у которого ось 8 помещена в продольный вдоль оси штока 1 паз по скользящей посадке и подпружинена устройством 9, позволяющим регулировать усилие натяжения; установка направления перемещения зажимных роликов 35 и 36 в зависимости от формы захватываемой детали 37 для обеспечения надежности ее захвата, что достигается поворотом направляющих рычагов 13 и 14 на пальцах 11 и 12 относительно корпуса 2 с помощью механизма ориентации их, путем перемещения втулки 21 по корпусу 2 и рычагов 15 и 16, связанных шарнирами 17-20, с направляющими рычагами 13 и 14 и
втулкой 21 с фиксатором положения в виде болта 22.
При захвате вращающейся детали 37 шток 1, служащий центральным пальцем,
перемещается по стрелке относительно корпуса 2 и передает посредством замкнутого гибкого звена 6 на шкивах 5, ТО, 23-28 синхронное движение :пальцам 31 и 32 до момента захвата детали 37 роликами 3, 35 и 36.
Формула изобретения
Захватное устройство, содержащее корпус, в котором размещен приводной зажимной палец со шкивом, охватываемым гибким замкнутым элементом, охва- тывающим также направляющие шкивы, между которыми расположены пальцы, закрепленные на гибком элементе.
Редактор А.Маковская
Составитель А.Алексеев Техред Л.Олийнык
Заказ 5525/13Тираж 952. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. Л/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено йодвижной фиксируемой втулкой, двумя парами рычагов, один из направляющих щкивов размещен на приводном зажимном пальце с возможностью перемещения вдоль его оси и подпружинен относительно него, при этом рычаги каждой пары связаны между собой посредством шарнира, первый рычаг каждой пары шар- нирно установлен н подвижной втулке, а второй шарнирно установлен на корпусе, причем на вторых рычагах каждой пары размещены по два направляющих шкива, между которыми расположены пальцы.
Корректор А.Обручар

| название | год | авторы | номер документа |
|---|---|---|---|
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Комплексная грузо-пассажирская переправа через водоток с приводом от водяного колеса | 2019 |
|
RU2713312C1 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| Многокулачковый самоцентрирующий центробежный патрон | 1991 |
|
SU1808490A1 |
| Силовая головка | 1990 |
|
SU1756030A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖКИ ПЕРЕДКА БОТИНКА НА КОЛОДКУ | 1971 |
|
SU322872A1 |
| Ручной кантователь | 1982 |
|
SU1026921A1 |
| ПРИСПОСОБЛЕНИЕ К АВТОМАТИЧЕСКИМ ТОКАРНЫМ СТАНКАМ ДЛЯ ПОДАЧИ МАТЕРИАЛА | 1931 |
|
SU38565A1 |
Изобретение относится к области машиностроения, в частности к захватным устройствам промышленных роботов. Целью изобретения является расширение технологических возможностей. Регулировка натяжения замкнутого гиб- кого звена 6 производится натяжным шкивом 10. Направление перемещения / (Л 00 Сд Ni Oi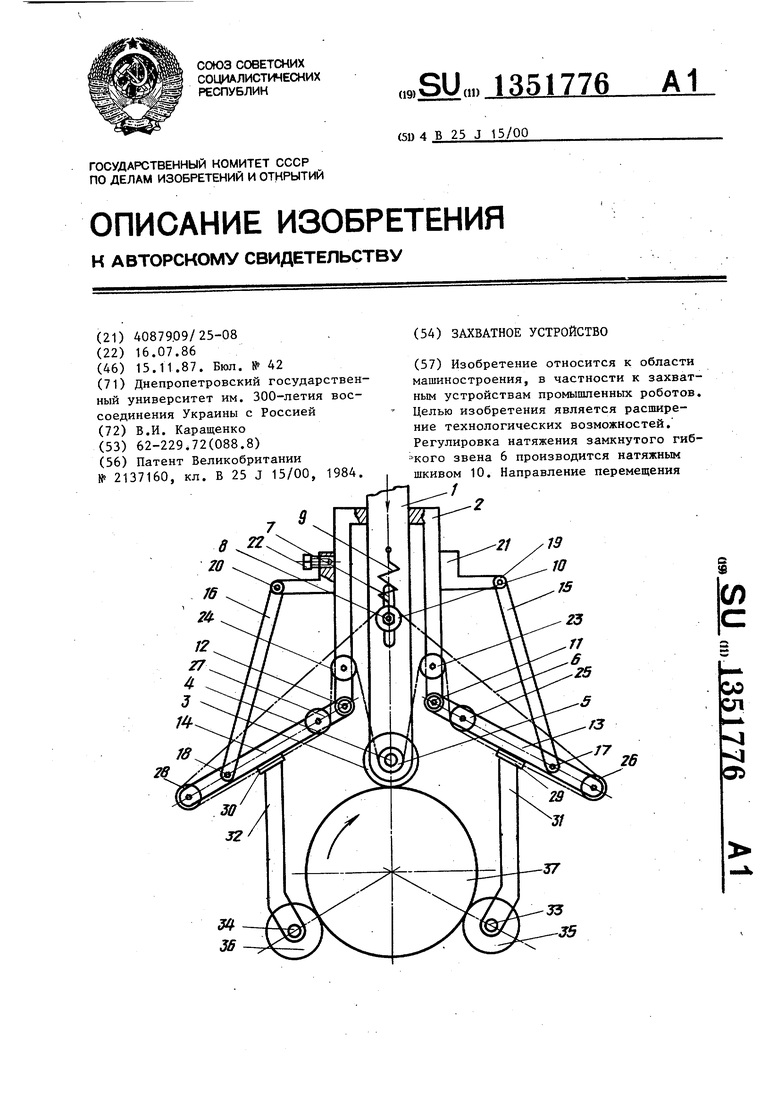
| СПОСОБ НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ | 1998 |
|
RU2137160C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
