Изобретение относится к грузозахватным устройствам.
Целью изобретения является уменьшение габаритных размеров устройств
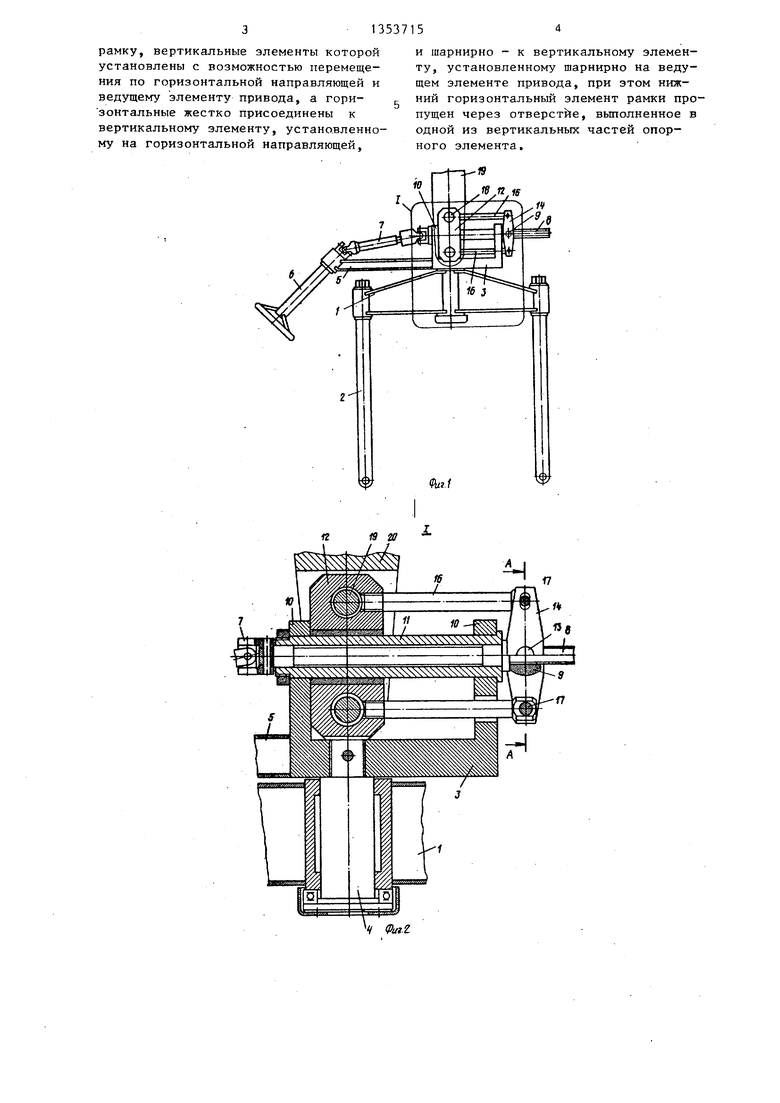
На фиг, 1 показано устройство, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - кинематическая схема устройства; на фиг. 4 - сечение Л-А на фиг. 2.
Балансирный механизм крепится к балке 1 с грузозахватными органами
2,включает в себя опорный элемент
3,шарнирно соединенный посредством вертикальной оси 4 с балкой 1. На. опорном элементе 3 закреплен посредством кронштейна 5 винтовой приводj содержащий маховик 6, карданный
вал 7, винт 8 и гайку 9. Опорный элемент 3 выполнен U-образным, вертикальные стойки ,10 его соединены полой направляющей 11, на которую посалсен несущий элемент 12 в виде ползуна. Внут ри направляющей 11 проходит винт 8 винтового привода, который с одной стороны соединен через карданный вал 7 с маховиком 6, а с другой СТО.РОНЫ винта 8 находится гайка 9, снабженная с двух сторон дапфами 13, шарнирно соединенная посредством указанных цапф 13 с центром двуплечего рычага 14, выполненного в виде двух пластин 15, охватывающих гайку 9. Двуплечий рычаг 14 на концах снабжен горизонтальными элементами (тягами) 16, связанными с несущим элементом 12. Тяги 16 шарнирно соединены с двуплечим рычагом 14 посредством осей 17 (фиг. 3), установленных между пластинами 15, при этом нижняя тяга пропущена чере отверстие 18, выполненное в .стойке 10 опорного элемента 3. Несущий элемент 12 с рамкой, образованной также тягами 16 и рычагом 14, представляет собой несущий орган.
Несущий элемент 12 посредстном пальцев 19 соединяется с подвеской 20 манипулятора (не показан). Опорный элемент 3 может поворачиваться относительно балки 1 на 360.
Ось 21 является осью подвешивания устройства. Траверса жестко подсоединяется с помощью грузозахватных органов 2 к грузу 22, центр 23 масс которого не совпадает с осью 21 подвешивания при исходном положении траверсы.
Устройство работает следуюпщм образом.
Для выравнивания груза 22 необ- ходимо верхнюю часть устройства,
которая включает в себя ось 4, опорный элемент 3, кронштейн 5, маховик 6, карданный ва,п 7, винт 8, гайку 9, ось 11, несущий элемент 12
с тягами 16 и двуплечий рычаг 14, повернуть относительно нижней части в которую входит балка 1, грузозахватные органы 2 и груз 22, на угол с/, который должен быть равным углу
о/г, где о/г - угол расположения центра 23 масс груза 22. При равенстве углов л и о(-, вращая маховик 6 винтового привода, передают вращение винту 8. Вращение винта 8 преобразуется в поступательное движение гайки 9. Посредством двуплечего рычага 14 и двух тяг 16 несущий элемент 12 перемещается по горизонтальной оси 11. Шарнирное соединение двуплечего рычага 14 с гайкой 9 и с тягами 16 позволяет выравнивать усилия, передаваемые тягами 16 несущему элементу 12, что исключает заедание при перемещении несущего элемента 12 по оси 11.
Перемещая, несущий элемент 12, перемещают ось 21 подвешивания до сов- мещения с центром 23 масс груза 22. Совме1цение оси 21 подвешивания с центром 23 масс груза 22, т.е. равенствоо(и d, М и R р обеспечивает горизонтальное положение груза и точное наведение грузов для стыковки при жестком соединении устройства с манипулятором.
Действуя в обратной последовательности, устройство приводят в исходное положение.
Формула изобретения
Балансирный механизм грузозахватного устройства, включающий в себя связанный с грузозахватным устройством посредством вертикальной оси
вилкообразный опорный элемент и
Связанный с приводом несущий орган, соединяемый с грузоподъемным механизмом, отличающийся тем, что, с целью уменьш.ения габаритных
размеров, он снабжен прикрепленной к вертикальным частям опорного элемента горизонтальной полой направляющей для ведущего элемента привода, а несущий орган представляет собой
рамку, вертикальные элементы которой установлены с возможностью перемещения по горизонтальной направляющей и ведущему элементу привода, а гори- зонтальные жестко присоединены к вертикальному элементу, установленному на горизонтальной направляющей.
и шарнирно - к вертикальному элементу, установленному шарнирно на ведущем элементе привода, при этом нижний горизонтальный элемент рамки пропущен через отверстие, вьтолненное в одной из вертикальных частей опорного элемента.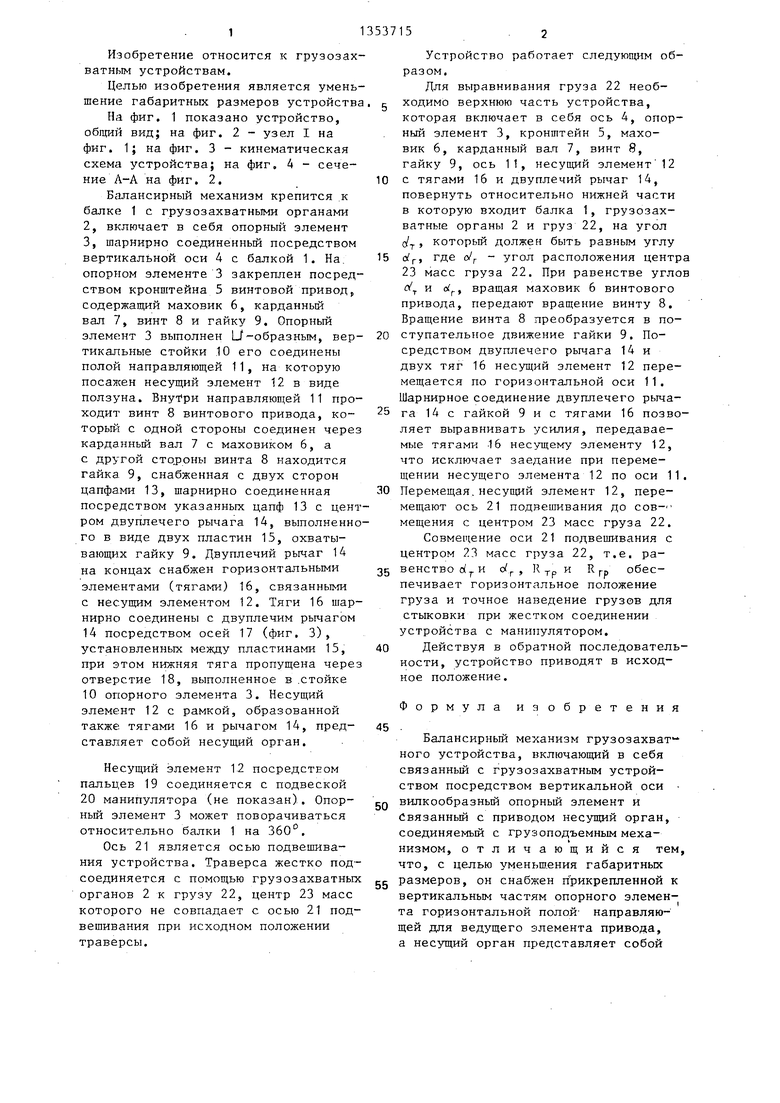
| название | год | авторы | номер документа |
|---|---|---|---|
| Траверса | 1982 |
|
SU1094834A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2012 |
|
RU2489307C1 |
| Грузоподъемная траверса | 1984 |
|
SU1234344A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНОГО ЗЕРКАЛА ТЕЛЕСКОПА С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 2024 |
|
RU2837324C1 |
| Перегрузочная система | 1986 |
|
SU1472413A1 |
| ТРАВЕРСА | 2017 |
|
RU2661671C1 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| Траверса для автоматического выравнивания положения груза | 1985 |
|
SU1289797A1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2016 |
|
RU2655830C2 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - уменьшение габаритных размеров устройства. Устройство содержит несущий элемент 12 и связанньй с ним через винтовой привод 8 с рукояткой 6 опорный элемент 3, к которому прикреплена банка 1 с грузозахватными органами 2. При поводке захватного устройства на груз, а также при захвате груза со смещенным центром тяжести вращением рукоятки 6 перемещают несущий элемент 12 с вертикальной осью, проходящей . через центр тяжести груза. 4 ил. Pu8.3 W со О1 со сд
«
Ч
Редактор Н, Егорова
Составитель О. Фотинич
Техред И.Верес Корректор А.Тяско
Заказ 5661/20Тираж 721Подписное
ВНЙИПЙ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
9(2.
| Траверса | 1982 |
|
SU1094834A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| . | |||
