(Л
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1414622A1 |
| Манипулятор | 1987 |
|
SU1442500A1 |
| Манипулятор | 1988 |
|
SU1563969A1 |
| Сбалансированный манипулятор | 1987 |
|
SU1468739A1 |
| Манипулятор | 1986 |
|
SU1542791A2 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Манипулятор | 1988 |
|
SU1549747A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1530432A1 |
| Сбалансированный манипулятор | 1989 |
|
SU1673432A1 |
| МЕХАНИЗМ ДЛЯ ПОВОРОТА СТРЕЛЫ МАНИПУЛЯТОРА | 2011 |
|
RU2456227C1 |
Изобретение относится к машиностроению, а именно к манипуляторам, и может быть использовано для механизации погрузо-разгрузочных работ. Цель изобретения - улучшение эксплуатационных характеристик. Кран-манипулятор содержит поворотную колонну 12, несущую грузовую стрелу, состоящую из шарнирно соединенных между собой рычага 1, грузонесущего звена 2, тяги 3 и установленного на колонне 12 привода вертикального перемещения, состоящего из последовательно соединенных зубчатой и винтовой передач, с ведомым звеном которого шарнирно соединена тяга 3. Рычаг 1 шарнирно соединен с поворотной колонной 12, грузонесущее звено 2 выполнено с центром тяжести, совмещенным с осью шарнира его связи с рычагом, а тяга 3 и рычаг 1 снабжены противовесами 6 и 4. 3 ил.
Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для механизации погру- зочно-разгрузочных, подъемно-транспортных и других операций.
Цель изобретения - улучшение эксплуатационных характеристик.
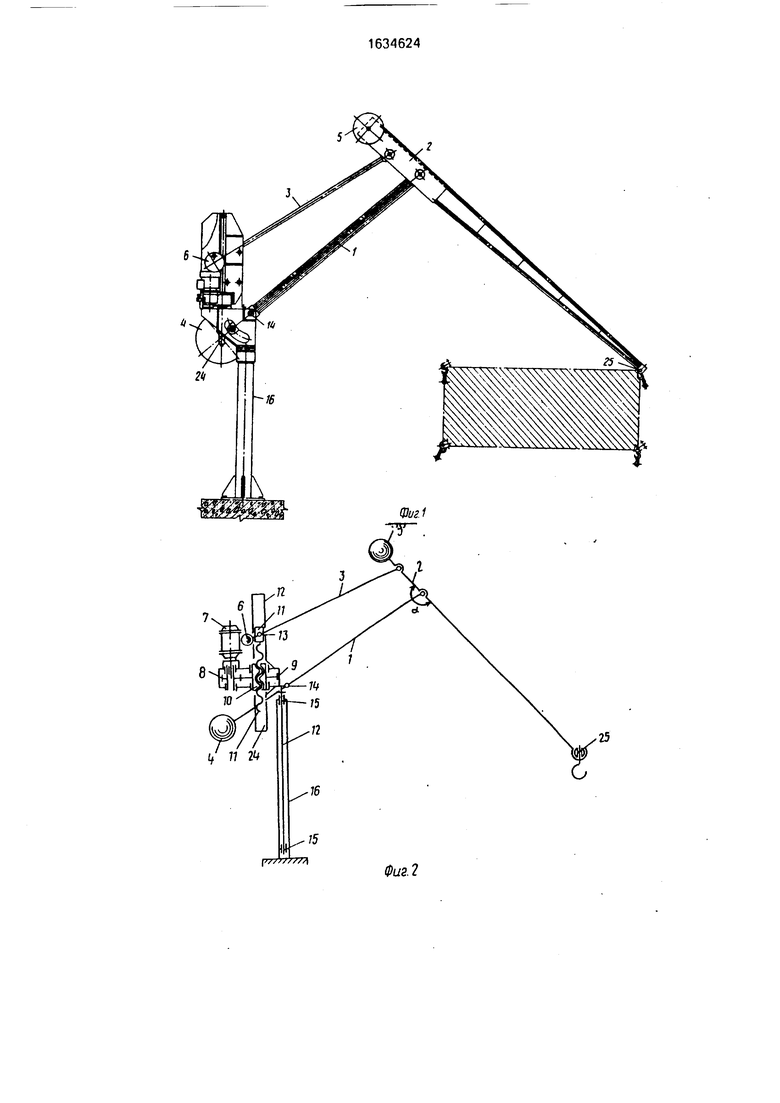
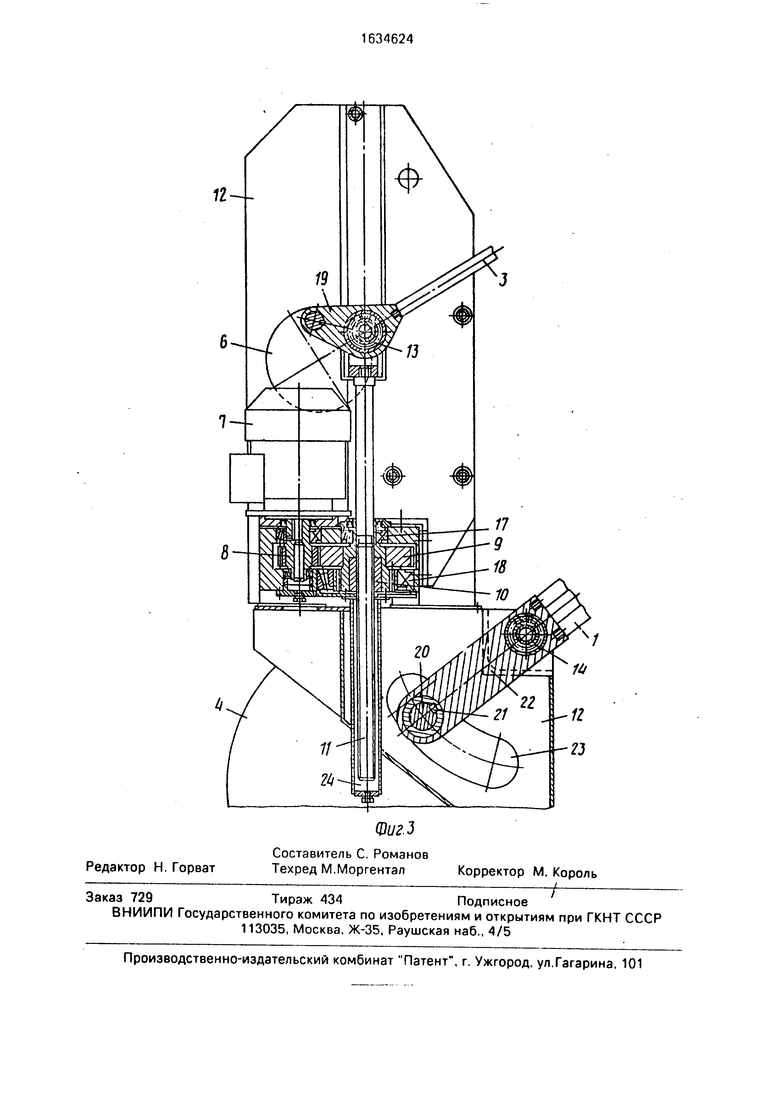
На фиг.1 представлен манипулятор, общий вид; на фиг.2 - то же, кинематическая схема; на фиг.З - привод вертикального перемещения и противовесы.
Манипулятор содержит грузовую стрелу, состоящую из шарнирно соединенных между собой рычага 1, грузонесущего звена 2 и тяги 3, снабженных соответственно противовесами 4-6, и привод вертикального перемещения, состоящий из электродвигателя 7, зубчатого редуктора, включающего шестерню 8 и зубчатое колесо 9, гайки 10, встроенной в зубчатое колесо 9 и жестко
связанной с ним, винта 11, взаимодействующего с гайкой и установленногр на поворотной колонне 12 с возможностью перемещения. Рычаг 1, звено 2 и тяга 3 вместе с поворотной колонной 12 образуют регулируемыйчетырехшарнирныйпрямолинейно направляющий механизм с опорными шарнирами 13 и 14, из которых шарнир 13 тяги 3 с винтом может переставляться посредством привода вертикального перемещения вдоль оси винта 11 относи- . тельно поворотной колонны 12, установленной с помощью подшипников 15 на основании 16.
Зубчатое колесо 9 установлено на поворотной колонне 12 посредством радиально- упорных подшипников 17 и 18 (фиг.З). Противовес 6 тяги 3 выполнен в виде диска, эксцентрично установленного посредством шпонки на треугольной части 19 тяги 3 так,
О
со N с ю
Јь
что центр масс противовеса 6 лежит на продолжении оси тяги 3. Противовес 4 рычага 1 выполнен в виде двух одинаковых дисков, жестко соединенных посредством оси 20 и шпонки 21 с хвостовой частью 22 рычага и охватывающих нижнюю часть поворотной колонны, в которой выполнен круговой паз 23 для пропуска оси 20. Объем 24 заполнен маслом, служащим для смазки винтовой передачи и вытесняемым в зубчатый редуктор при опускании винта 11.
Масса противовеса 5 устанавливается исходя из условия совмещения общего центра масс системы, включающей грузозахватный орган 25, грузонесущее звено 2 и его противовес 5, с осью шарнира грузонесуще- го звена 2 с рычагом 1.
Масса противовеса 4 устанавливается исходя из условия совмещения центра масс системы, включающей грузозахватный орган 25, грузонесущее звено 2 с противовесом 5 и рычаг 1 с противовесом 4, с осью опорного шарнира 14.
Массы тяги 3 и его противовеса 6 устанавливаются исходя из условий совмещения их общего центра масс с осью шарнира 13 и уравновешивания массы манипулиру- емого объекта при вертикальном перемещении последнего посередине зоны обслуживания.
В результате в процессе горизонтального перемещения ненагруженного грузозахватного органа 25 на любом уровне зоны обслуживания, реализуемого оператором при неподвижном винте 11, общий центр масс грузовой стрелы, расположенной в плоскости осей шарниров 13 и 14, неподвижен, и оператор полностью разгружен от воздействия сил тяжести элементов стрелы. При этом вследствие уравновешенности стрелы усилие оператора, необходимое для горизонтального перемещения грузозахватного органа 25 (с манипулируемым объектом или без него), направлено на преодоление только трения.
При вертикальном подъеме грузозахватного органа 25 без манипулируемого объекта суммарная сила тяжести тяги 3, его противовеса 6 и винта 11 является движущей и помогает работе двигателя. При вертикальном опускании грузозахватного органа 25 без манипулируемого объекта привод преодолевает только указанную силу тяжести.
При вертикальном перемещении грузозахватного органа 25 с манипулируемым объектом суммарная сила тяжести тяги 3, его противовеса б и винта 11 частично уравновешивает силу тяжести манипулируемого объекта (что обусловлено противонаправ- ленностью движений винта 11 и грузозахватного органа 25) и, как следствие, частично разгружает двигатель силой тяжести манипулируемого объекта.
Горизонтальное перемещение точки подвеса груза на требуемом уровне осуществляется оператором при отключенном электродвигателе 7 и фиксированном в соответствующем положении винте 11.
Изменение уровня горизонтального перемещения осуществляется приводом путем изменения уровня оси шарнира 13. Вертикальное перемещение точки подвеса груза осуществляется приводом и контролируется оператором. Перемещение по любой криволинейной траектории осуществляется оператором при включенном электродвигателе 7.
Поворот стрелы вокруг вертикальной оси осуществляется оператором. Формула изобретения Кран-манипулятор, содержащий установленную на основании поворотную часть,
на которой вертикально установлен винт винтовой приводной передачи, ведомое звено которой шарнирно связано с жесткой тягой, размещенной над шарнирно связанным с поворотной частью рычагом, один конец которого и один конец жесткой тяги шарнирно связаны с грузовым звеном, на нижнем конце которого смонтирован грузозахватный орган, отличающийся тем, что, с целью улучшения эксплуатационных
характеристик, он снабжен противовесами, смонтированными на другом конце рычага и на другом конце жесткой тяги, при этом центр тяжести грузового звена совмещен с осью шарнира его связи с рычагом.
fr29t C9l
| Консольный кран | 1979 |
|
SU771005A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
