1
Изобретение относится к электротехнике, в частности к устройствам для связи энергосистем, и может быт использовано для управления асинхро низированным электромеханическим пробразователем частоты (АС ЭМПЧ).
Цель изобретения - повышение ка чества напряжения у потребителей в консольном режиме путем повышения; быстродействия выявления консольного режима. .
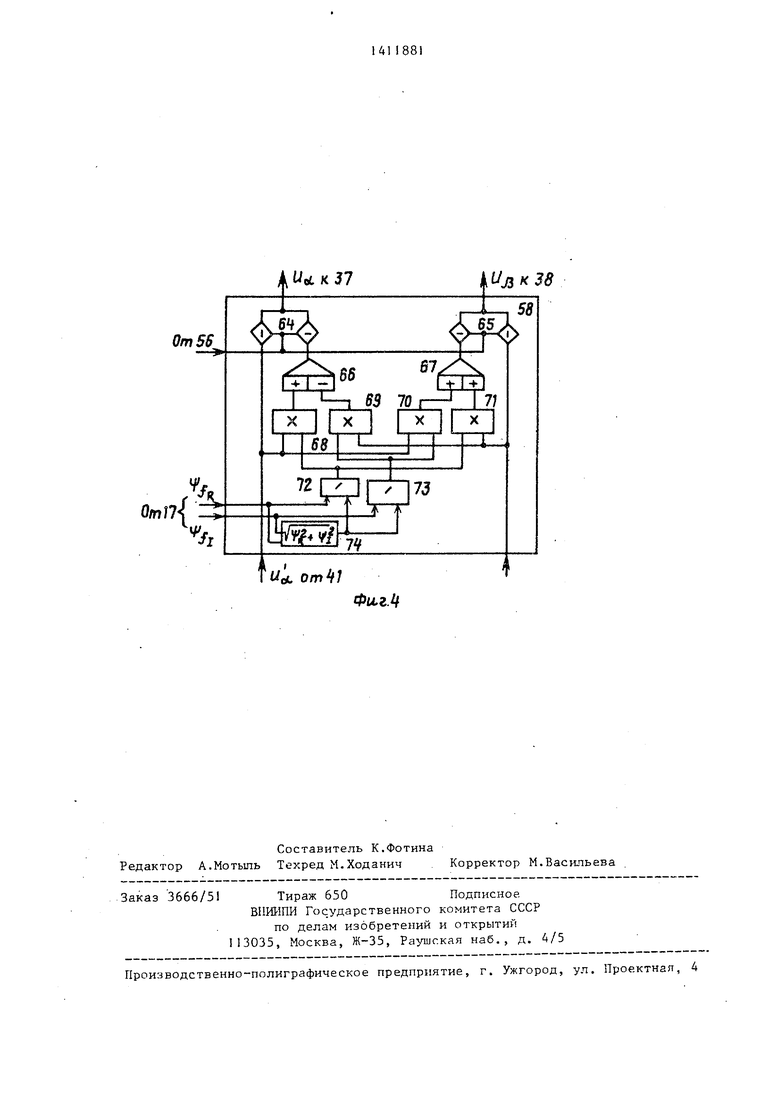
На ф.иг. 1 приведена принципиальная схема энергосистемы с АС ЗМПЧ; на фиг.2 - принципиальная схема АС ЭМПЧ с Системой регулирования; на фиг.З - принципиальная схема фиксатра наступления консольного режима; на фиг.4 - принципиальная схема промежуточного преобразователя координат.
Две асинхронизированные синхронн машины АСМ 1 и 2 соединенные общи валом 3, подключены через трансформ
торы 4 и 5 связи в рассечку линии электропередачи, свяэьшающую две энергосистемы. Для подключения АС ЭМПЧ к связьгоаемым энергосистемам
используются выключатели 6 и 7. На одном валу АСМ находится углоизмери- тельная машина 8. Регулирование режима АС ЭМПЧ осуществляется с поI мощью регуляторов 9 и 10, выходы ко торых подключены к управляющим вхоiдам преобразователей II и 12 частоты
с непосредственной связью ПЧНС .
I Питание ПЧНС осуществляется от втоi ричных обмоток трансформаторов 13
|и 14, первичные обмотки которых под ключены к стаюрным цепям АСМ.
Устройство управления АС ЭМПЧ содержит датчики 15 и 16 опорных напряжений, подключенные к каналам... передачи опорных векторов связьгоаемых энергосистем; датчики 17 и 18 синхро ных проекций тока ротора и потоко- сцепления; датчики 19 и 20 напряжений; .. датчики 21 и 22 частоты связываемых энергосистем; ..датчик 23 активной мощности одной из машин, датчики 24 и 25 разности фаз; датчик 26 углового положения вала,а .также датчик 27 частоты вращения вала. Первичная информация измеряется с помощью тран1форматора 28 тока электропередачи, трансформаторов 29-32 напряжения и трансформаторов 33 и 34 тока АСМ.
Датчики I9 и 20 напряжений подклю чены соответственно к трансформато
2
0
5
0
w
5 мощности Р
рам 29 и 30 напряжений; д атчик 23 активной мощности подключен к трансформатору 28 тока и трансформатору
30напряжения; датчики 21 и 22 часг тоты подключены к соответствующим каналам передачи опорных векторов; датчики 24 и 25 разности фаз одним из входов подключены к трансформаторам
31и 32 напряжения, а вторым входом - к соответствующему каналу передачи опорных векторов; датчики 17 и 18 синхронных проекций тока ротора и по- токосцепления подключены к соответ5 ствующим трансформаторам 31-34 токов и напряжений и к каналам передачи опорньгх векторов; датчик 27 частоты , вращения вала и датчик 26 углового . положения вала подключены к угло0 измерительной машине 8.
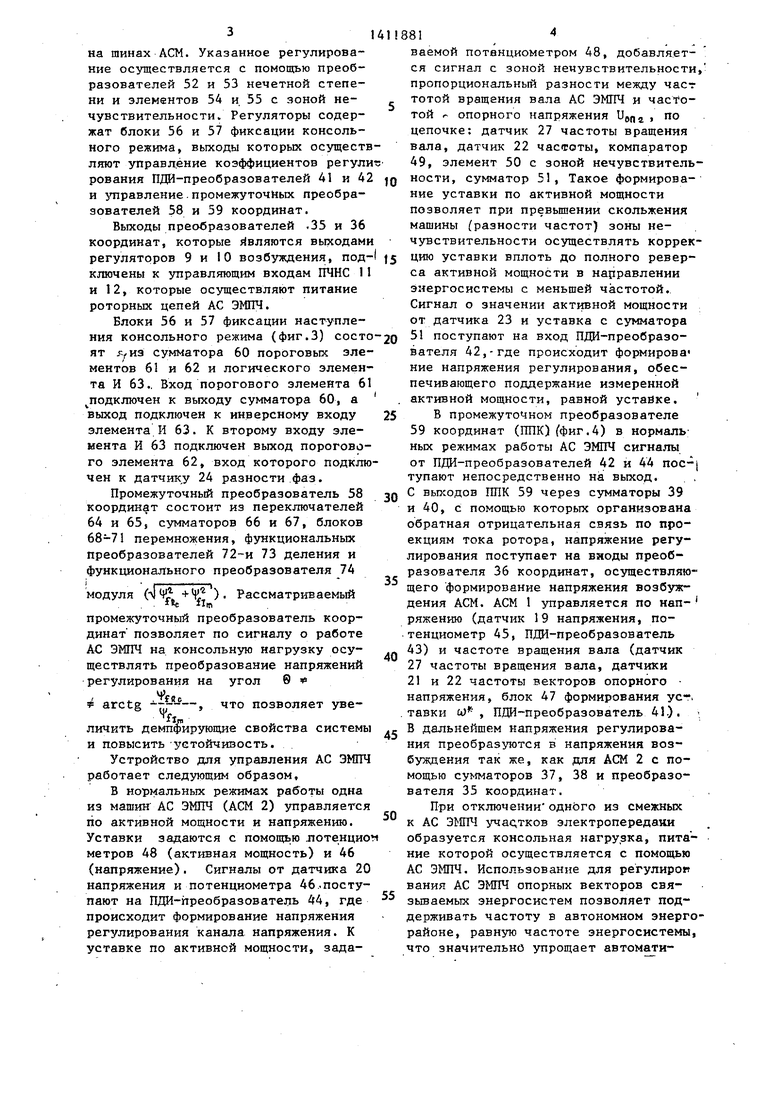
Регуляторы 9 и 10 возбуждения состоят из преобразователей 35 и 36 координат, сумматоров 37-40, про- порционально-дифференциально-интег- ральньгх ПДИ преобразователей 41-44, причем преобразователи 41 и 42 вьтолп нены с изменяющимися коэффициентами усиления. Уставки по напряжению U задаются с помощью потенциометров 45 и 46. Уставка по скорости вращения вала ш формируёт ся в блоке 47, например по следующему закону
- У1.+ Чг 2
)
уставка по активной
задается с помощью по-.. тенциометра 48, компаратора 49, элемента 50 с зоной нечувствительности и ;сумматора 51:
K() + ,
если ( « я ) f О если |ц), - WQ I 1
;А п. J
ft) f
если (c.j.-Wg) &. .
t Р- J j
где Р
уставка по активной мощности, формируемая потенциометром 48; зона нечувствительности элемента 50.
В каналы регулирования активной мощности и скорости вращения соответствующих машин включено регулирование по разности фаз между опорным вектором и вектором напряжения
31
на шинах ACM. Указанное регулирование осуществляется с помощью преобразователей 52 и 53 нечетной степени и элементов 54 и 55 с зоной не- чувствительности. Регуляторы содержат блоки 56 и 57 фиксации консольного режима, выходы которых осуществляют управление коэффициентов регули рования Пда-преобразователей 41 и 42 и управление.промежуточных преобразователей 58 и 59 координат.
Выходы преобразователей .35 и 36 координат, которые Являются вьрсодами регуляторов 9 и 10 возбуждения, под-1 ключены к управляющим входам ПЧНС 11 и 12, которые осуществляют питание роторных цепей АС ЭМПЧ.
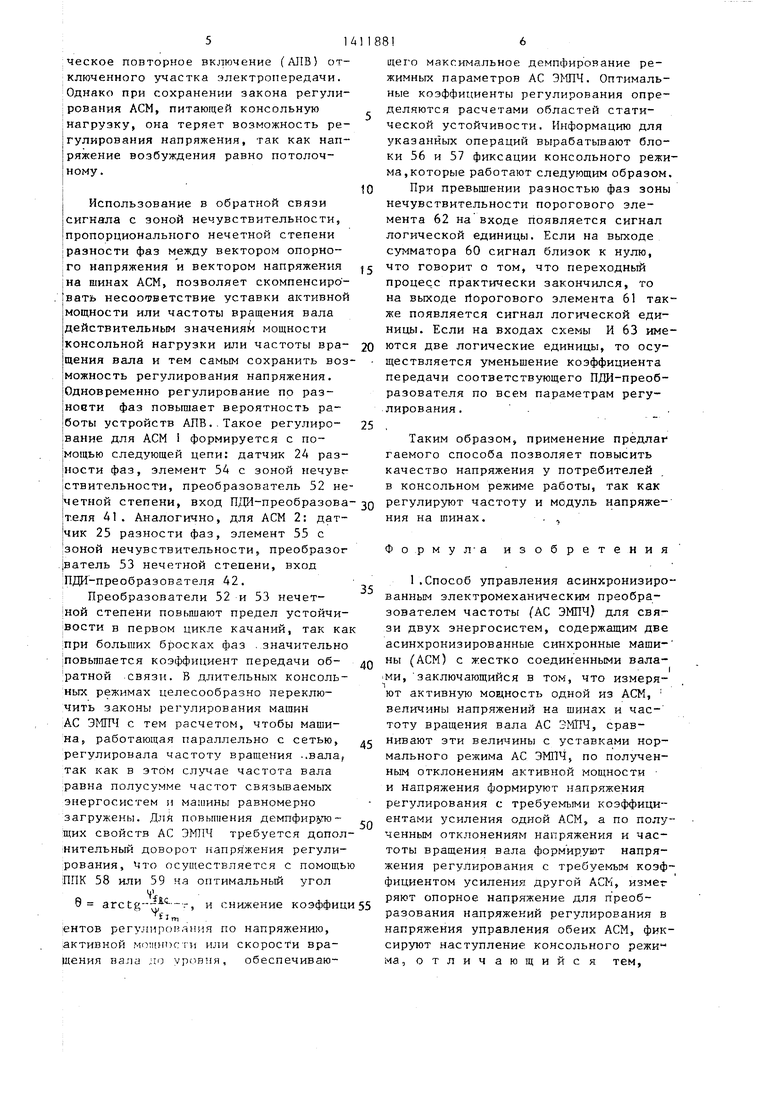
Блоки 56 и 57 фиксации наступления консольного режима (фиг.З) состоят .С(.из сумматора 60 пороговых элементов 61 и 62 и логического элемента И 63.. Вход порогового элемента 61 подключен к выходу сумматора 60, а выход подключен к инверсному входу элемента И 63. К второму входу элемента И 63 подключен выход порогового элемента 62, вход которого подключен к датчику 24 разности фаз.
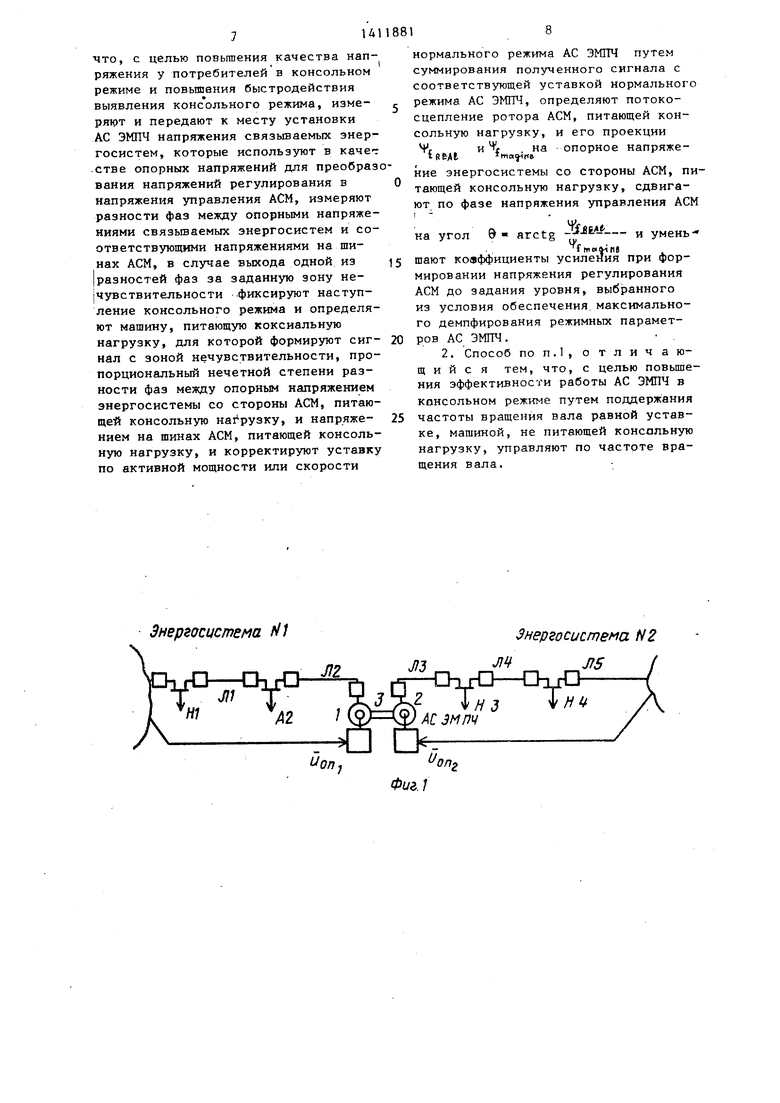
Промежуточный преобразователь 58 координат состоит из переключателей 64 и 65, сумматоров 66 и 67, блоков 68-71 перемножения, функциональных преобразователей 73 деления и функционального преобразователя 74
модуля (л V ) , Рассматриваемый
ч я
промежуточный преобразователь координат позволяет по сигналу о работе АС ЭМПЧ на. консольную нагрузку осуществлять преобразование напряжений
регулирования на угол 9 is
и
arctg г.р--, что позволяет увеличить демп(ирующие свойства системы
и повысить УСТОЙЧИВОСТЬ.
Устройство для управления АС ЭМПЧ работает следующим образом,
В нормальных режимах работы одна из машин АС ЭМПЧ (АСМ 2) управляется по активной мощности и напряжению. Уставки задаются с помощью лотенцио метров 48 (активная мощность) и 46 (напряжение). Сигналы от датчика 20 напряжения и потенциометра 46..посту- пают на ПДИ-преобразоватедь 44, где происходит формирование напряжения регулирования канала напряжения. К уставке по активной мощности, зада
Q
5
0 5
о
5
0
5
0
8814
ваемой потенциометром 48, добавляется сигнал с зоной нечувствительности, пропорциональный разности между част тотой вращения вала АС ЭМПЧ и частотой опорного напряжения , по цепочке: датчик 27 частоты вращения вала, датчик 22 частоты, компаратор 49, элемент 50 с зоной нечувствительности, сумматор 51, Такое формирование уставки по активной мощности позволяет при превышении скольжения машины (разности частот) зоны нечувствительности осуществлять коррекцию уставки вплоть до полного реверса активной мощности в направлении энергосистемы с меньшей частотой. Сигнал о значении активной мощности от датчика 23 и уставка с сумматора 51 поступают на вход ПДИ-преобразо- вателя 42,-где происходит формирова- ние напряжения регулирования, обеспечивающего поддержание измеренной активной мощности, равной уставке. В промежуточном преобразователе 59 координат (Ш1К)фиг.4) в нормаль; ных режимах работы АС ЭМПЧ сигналы от ПДИ-преобразователей 42 и 44 пос-| тупают непосредственно на выход. . , С вьпсодов ПИК 59 через сумматоры 39 и 40, с помощью которых организована обратная отрицательная связь по проекциям тока ротора, напряжение регулирования поступает на вноды преобразователя 36 координат, осуществляющего формирование напряжения возбуждения АСМ. АСМ 1 управляется по нап- ряжению (датчик 19 напряжения, потенциометр 45, ПДЙ-преобразователь 43) и частоте вращения вала (датчик 27 частоты вращения вала, датчики 21 и 22 частоты векторов опорного - напряжения, блок 47 формирования ус-. . тавки 0, ПДИ-преобразователь 41). В дальнейшем напряжения регулирования преобразуются в напряжения возбуждения так же, как для АСМ 2 с помощью сумматоров 37, 38 и преобразователя 35 ко.ординат.
При отключении одного из смежных к АС ЭМПЧ учас,тков электропередаии образуется консольная нагрузка, питание которой осуществляется с помощью АС ЭМПЧ. Использование для регулирои вания АС ЭМПЧ опорных векторов свя- зьшаемых энергосистем позволяет поддерживать частоту в автономном энергорайоне, равную частоте энергосистемы, что значительно упрощает автомати51
ческое повторное включение (AJIB) отключенного участка электропередачи. Однако при сохранении закона регулирования АСМ, питающей консольную нагрузку, она теряет возможность регулирования напряжения, так как напряжение возбуждения равно потолочному.
Использование в обратной связи сигнала с зоной нечувствительности, пропорционального нечетной степени Iразности фаз между вектором опорно- |Го напряжения и вектором напряжения I на шинах АСМ, позволяет скомпенсиро - вать несоофветствие уставки активной мощности или частоты вращения вала действительным значения мощности консольной нагрузки или частоты вращения вала и тем самым сохранить возможность регулирования напряжения. |0дновременно регулирование по раз- IHOBTH фаз повьпаает вероятность ра- |боты устройств АПВ..Такое регулиро- |вание для АСМ I формируется с помощью следующей цепи: датчик 2Д разности фаз, злемент 54 с зоной нечувг Ствительности, преобразователь 52 не |четной степени, вход Пда-преобразова теля А1. Аналогично, для АСМ 2: датчик 25 разности фаз, элемент 55 с зоной нечувствительности5 преобразог .ватель 53 нечетной степени, вход ПДИ-преобразователя 42.
Преобразователи 52 и 53 нечет- |ной степени повышают предел устойчи- iBocTH в первом цикле качаний, так ка |при больших бросках фаз .значительно повь шается коэффициент передачи обратной связи. В длительных консольных режимах целесообразно переключить законы регулирования машин АС ЭМГГЧ с тем расчетом, чтобы машина, работающая параллельно с сетью, регулировала частоту вращения ..вала, так как в этом случае частота вала равна полусумме частот связьшаемых энергосистем и машины равномерно загружены. ДлА повышения демпфирующих свойств АС ЭМПЧ требуется дополнительный доворот напря жения регулирования, Что осуществляется с помощь
ППК 58 или 59 на оптимальный угол ы
9 arctg--- - ---.-, и снижение коэффиц
fj-r, , . ентов регулировання по напряжению,
активной Mo;i(Ht)c ги или скорости вра- (цения нала ло ур.ння, обеспечиваю
16
|цего максимальное демпфирование режимных параметров АС ЭШЧ. Оптимальные коэффициенты регулирования опре- деляются расчетами областей статической устойчивости. Информацию для указанных операций вьфабатьшают блоки 56 и 57 фиксации консольного режима,которые работают следующим образом.
При превьщ ении разностью фаз зоны нечувствительности порогового элемента 62 на входе появляется сигнал логической единицы. Если на выходе сумматора 60 сигнал близок к нулю,
что говорит о том, что переходный процесс практически закончился, то на выходе rtoporoBoro элемента 61 также появляется сигнал логической единицы. Если на входах схемы И 63 имеются две логические единицы, то осу- ществляется уменьшение коэффициента передачи соответствующего ПДИ-преобразователя по всем параметрам регулирования .
,
Таким образом, применение предлаг- гаемого способа позволяет повысить качество напряжения у потребителей в консольном режиме работы, так как
регулируют частоту и модуль напряже- ния на шинах. . ,
Фо.рмул а изобретения
1. Способ управления асинхронизиро- ванным электромеханическим преобразователем частоты (АС ЭМПЧ) для связи двух энергосистем, содержащим две асинхронизированные синхронные машины (АСМ) с жестко соединенными вала- Ми, заключающийся в том, что измеряют активную мощность одной из АСМ, величины напряжений на шинах и час- тоту вращения вала АС ЗМПЧ, сравнивают эти величины с уставками нормального режима АС ЭМПЧ, по полученным отклонениям активной мощности и напряжения формируют напряжения регулирования с требуемыми коэффици
антами усиления одной АСМ, а по полученным отклонениям напряжения и частоты вращения вала формируют напряжения регулирования с требуемым коэффициентом усиления другой АСМ, измег ряют опорное напряжение для преобразования напряжений регулирования в напряжения управления обеих АСМ, фиксируют наступление консольного режи ма, отличающийся тем.
что, с целью повышения качества напряжения у потребителей в консольном режиме и повьтания быстродействия выявления конс ольного режима, изме- ряют и передают к месту установки АС ЭМПЧ напряжения связьшаемых энергосистем, которые используют в качег стве опорных напряжений для преобразвания напряжений регулирования в напряжения управления АСМ, измеряют разности фаз между опорными напряжениями связьшаемых энергосистем и соответствующими напряжениями на шинах АСМ, в случае выхода одной из разностей фаз за заданную зону не- |Чувствительности фиксируют наступление консольного режима и определяют машину, питающую коксиальную нагрузку, для которой формируют сиг- нал с зоной нечувствительности, пропорциональный нечетной степени разности фаз между опорным напряжением энергосистемы со стороны АСМ, питающей консольную нат рузку, и напряже- нием на шинах АСМ, питающей консольную нагрузку, и корректируют уставку по активной мощности или скорости
нормального режима АС ЭМПЧ путем суммирования полученного сигнала с соответствующей уставкой нормального режима АС ЭМПЧ, определяют потоко- сцепление ротора АСМ, питающей консольную нагрузку, и его проекции
.
f . на
опорное напряжеtfiEAt
ние энергосистемы со стороны АСМ, питающей консольную нагрузку, сдвигают по фазе напряжения управления АСМ
&JEA1
Ч-г
И уменьна угол 9 « arctg
шают ковффициенты усиления при формировании напряжения регулирования АСМ до задания уровня, выбранного из условия обеспечения, максимального демпфирования режимных параметров АС ЭМПЧ, 2. Способ поп.1,отличаю- щ и и с я тем, что, с целью повьше- ния эффективности работы АС ЭМПЧ в
консольном режиме путем поддержания частоты вращения вала равной уставке, машиной, не питающей консольную нагрузку, управляют по частоте вращения вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |

Изобретение относится к электротехнике. Целью изобретения является повьппение качества напряжения у потре- ,бителей. в консольном режиме и повы- шение быстродействия выявления конг сольного режима, а также повышение эффективности работы в консольном режиме асинхроиизированного электромеханического преобравователя часто ты. Для этого в ск::темах регулировал ния асинхронизированных синхронных машин САСМ) преобразователя в качестве опорных напряжений используются напряжения на шинах связьшаемых знерг госистем, а при формировании напряжений регулирования по активной мощности и частоте дополнительно используются сигналы с зоной нечувствительности, пропорциональные нечетной степени соответствующих разностей фаз между векторами опорных напряжений и векторами напряжений на шинах АСМ, а также управляют АСМ, не питающей консольную нагрузку, по частоте вращения вала.1 з.п. ф-лы, . 4 ил. сл
Энергасцстема
лз
Знер система N2
и.
оп
63
Фи&.2
М.
к S8
-а.
J
OmSZ
т«От if
Ф-
От 27
.
От
Ф14,В,3
От 56
t/i, от 7
Uj3K38
Фи,гМ
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Управление режимами гиб кой межсистемной связи с АС ЭМПЧ | |||
| Рукопись детонирована в Информэнер- го, 1983,W 1348, эн-Д83,37 с | |||
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
