Изобретение относится к машиностроению, а именно к механизмам горизонтального перемещения рабочих органов, например инструмента, широко применяемых в роботостроении и станкостроении.
Цель изобретения - повышение точности позиционирования в выдвинутом положении ползуна за счет увеличения жесткости системы.
На фиг. изображен механизм, продольный разрез; на фиг. 2 - то же, поперечный разрез.
Механизм включает в себя ползун 1, перемеш,ающийся в горизонтальных направ- ляюш,их корпуса 2 (основания) от ходового винта 3 и двигателя 4. Ползун 1 является одним звеном параллелограмма, состоя- плего также из соединенных шарнирами 5 звеньев 6,7 и 8. Второй параллелограмм, включающий в себя корпус 2 и звенья 7,9 и 10, соединенные шарнирами 5, соединяется с первым общим звеном 7 (дополнительной тягой).
Механизм работает следуюи;им образом.
При вращении винта 3 от двигателя 4 ползун 1 горизонтально перемещается, выдвигаясь из корпуса 2. При этом щарниры 5, закрепленные на ползуне, перемещаются вместе с ним, и параллелограмм, образованный ползуном 1 и звеньями 6,7 и 8 «скла2
дывается, при этом звено 7 (тяга), перемещаясь параллельно своей оси, «складывает параллелограмм, образованный корпусом 2 и звеньями 9,7 и 10. При обратном ходе параллелограммы восстанавливаются в начальное положение. Такая конструкция позволяет значительно, практически на порядок по отношению к ходу, сократить базовую длину ползуна, примерно на половину сократить величину перемещающихся масс и уве- личить жесткость системы, изменяя длину наклонных звеньев параллелограммов.
Формула изобретения
Механизм горизонтального перемещения, содержащий основание с направляющими, в которых размещен ползун, и привод, кинематически связанный с ползуном винтовой парой, отличающийся тем, что, с целью повышения точности позиционирования в выдвинутом положении ползуна за счет увеличения жесткости системы, основание и ползун снабжены шарнирно связанными с ними поворотными звеньями, шарнирно связанными между собой дополнительно введенной тягой, при этом основание со своими поворотными
звеньями и тягой образует один параллело- граммный механизм, а ползун со свои.ми поворотными звеньями и той же тягой образует второй параллелограммный механиз.м.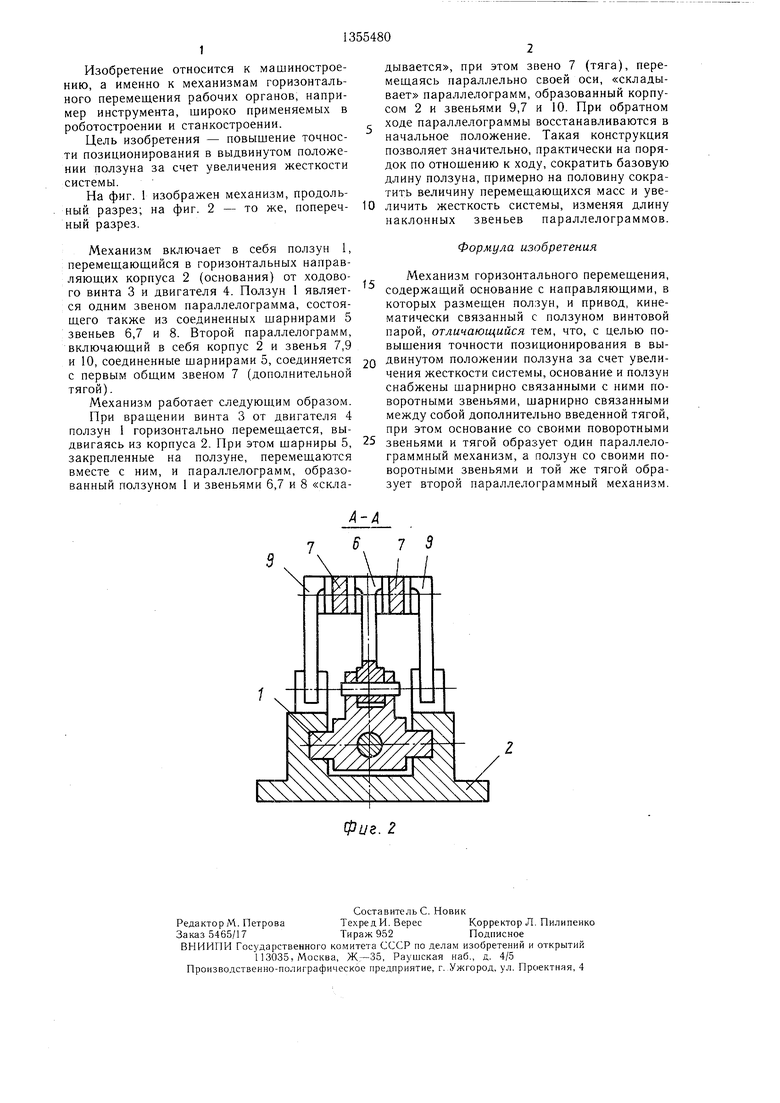
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1007967A1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| УСТРОЙСТВО ДЛЯ СТРУЙНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ НАГРЕВА КОТЕЛЬНОГО АГРЕГАТА | 2005 |
|
RU2289079C1 |
| УСТРОЙСТВО ДЛЯ НОЖНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2177896C2 |
| Схват | 1981 |
|
SU1013201A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| УСТРОЙСТВО ДЛЯ УГЛОВЫХ И ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1994 |
|
RU2102714C1 |
| ДВУСТОРОННИЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 1972 |
|
SU353796A1 |
| Шаблон для изготовления катушек электрических машин | 1988 |
|
SU1585877A1 |
Изобретение относится к машиностроению, а именно к механизмам горизонтального перемещения рабочих органов: инструментов станков, захватов роботов. Цель изобретения - повышение точности позиционирования в выдвинутом положении ползуна за счет увеличения жесткости системы. Ползун 1 выдвигается из корпуса 2 от двигателя 4 через передачу, например, винт- гайка. Ползун 1 является одним звеном параллелограмма, имеюш,его кроме того, звенья 6,7,8, и связан с параллелограммным механизмом, имеющим звенья 9,7,10 и корпус 2. Звено 7 (дополнительная тяга) - общее звено для обоих параллелограммов - при перемещении ползуна 1 складывает параллелограммы. В результате конструкция позволяет на порядок снизить базовую длину ползуна, сократить величину перемещающихся масс и увеличить жесткость системы, изменяя длину наклонных звеньев параллелограмма. 2 ил. W (О со 01 О1 4 00
Фиг. 2
