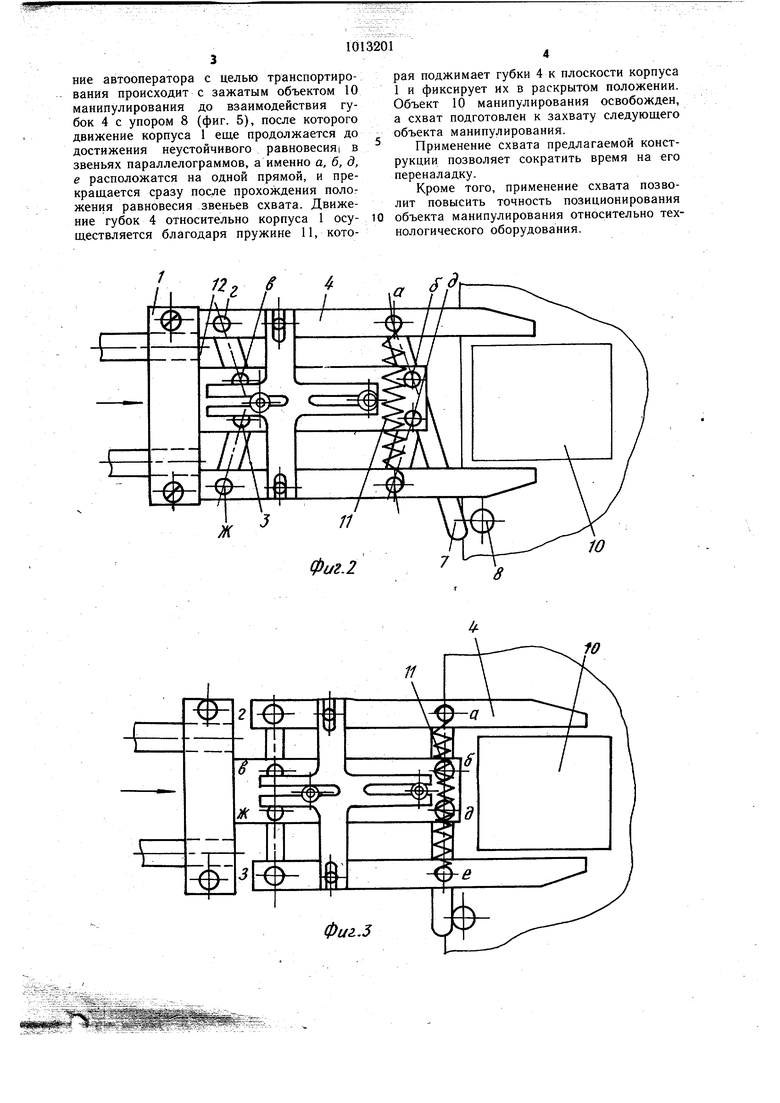
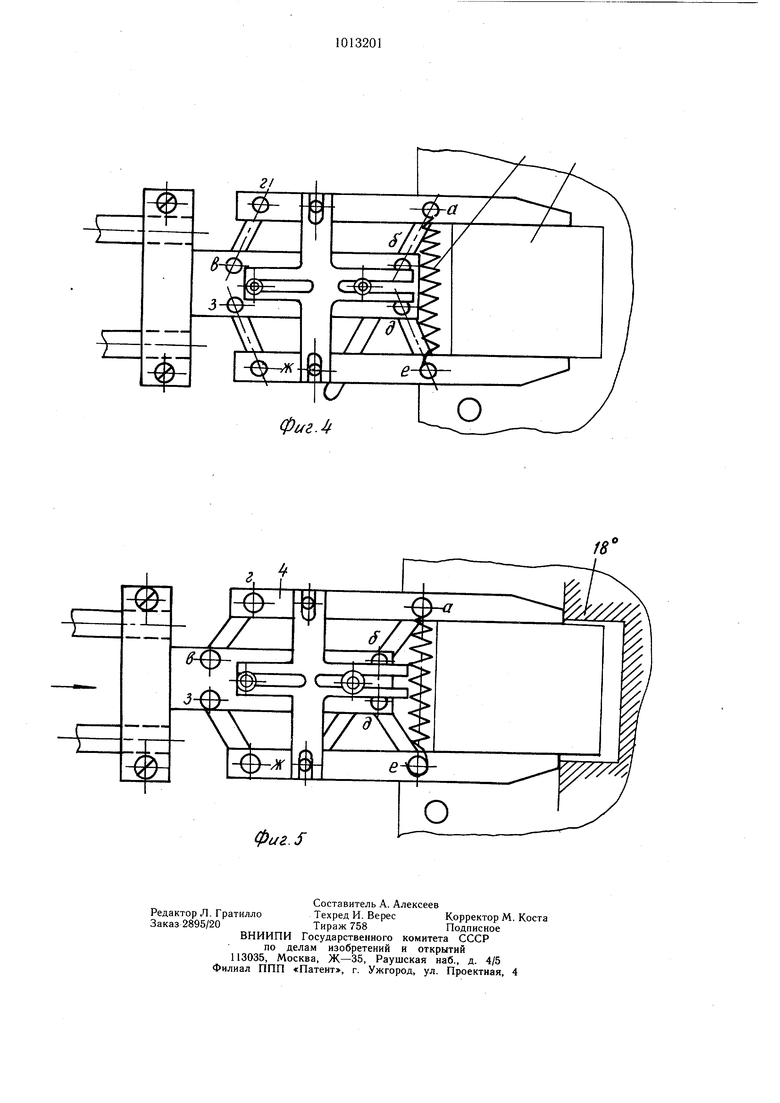
- „ ijaij.-Изобретение относится к автоматизации технологических процессов и может быть применено, например, в приборостроении или радиоэлектронной промышленности для автоматизации операций сборки или перемещений малогабаритных изделий. Известен схват, содержащий подпружиненные губки, закрепленные на звеньях параллелограммного механизма 1. Недостатком известного охвата являются ограниченные технологические возможности. Цель изобретения - расширение технологических возможностей, заключающееся в повышении универсальности и упрощении переналадок. Цель достигается тем, что схват, имеющий подпружиненные губки, закрепленные на звеньях параллелограммного механизма, снабжен хвостовиком, упором, подвижным копиром, на котором выполнен крестовый паз, и пальцами, закрепленными на губках и на корпусе, причем пальцы размещены в пазах копира, упор установлен с возможностью взаимодействия с губками, а хвостовик закреплен на одном из звеньев параллелограммного механизма. На фиг. 1 изображен схват, общий вид; на фиг. 2 - то же, в момент соприкосновения хвостовика с упором, стационарно установленным на технологическом оборудовании, при захвате детали, вид сверху; на фиг. 3 - то же, в момент взаимодейстствия хвостовика с упором (положение неустойчивого равновесия звеньев шарнирного четырехзвенника типа параллелограмма); на фиг. 4 - то же, в момент взятия объекта манипулирования, вид сверху; на фиг. 5- то же, в момент установки объекта манипулирования на рабочую позицию. Схват включает в себя Г-образный корпус 1, на поперечной части которого имеются два посадочных отверстия, необходимых для установки корпуса 1 на тяги 2, ,принадлежащие автооператору. Фиксация корпуса 1 на тягах 2 осуществляется с помощью винтов 3. К центральной части корпуса шарнирно прикреплены губки 4 с помощью звеньев 5 и осей 6. Три звена из четырех представляют собой одинаковые детали, четвертое имеет хвостовик 7, который взаимодействует с упором 8, стационарно установленным на технологическом оборудовании 9 при укладке и взятии объекта 10 манипулирования. Губки схвата 4 постепенно сжимаются упругим элементом 11. Под действием упругого элемента 11 губки 4 поджимаются к поперечной части 12 корпуса 1, которая является упором для губок 4, определяющим степень раскрытия последних в момент, предшествующий взятию схватом объекта 10 манипулирования. Регулировка степени раскрытия губок в момент удержания схватом объекта 10 манипулирования осуществляется винтом 13 и контргайкой 14. Винт 13 ограничивает раскрытие губок таким образом, что расстояние между губками 4 меньще щирины объекта 10 манипулирования. Губки 4 связаны -между собой крестообразным копиром 15 с целью обеспечения их одновременного движения. Копир 15 имеет на концах прорези, которые являются направляющими для двух штифтов 16, установленных на корпусе 1. Штифты 17 имеют упорные шайбы 18, удерживающие копир 15 на корпусе 1. Схват действует следуюшим образом. Автооператор, выдвигая звено, на котором закреплен схват, выводит последний в зону взятия объекта 10 манипулирования. В момент до соприкосновения хвостовика 7 с упором 8 губки 4 под действием пружины 11 поджимаются к плоскости корпуса 1 (губки раскрыты) благодаря тому, что звенья параллелограммов абвг и дежз находятся слева (фиг. 2) от неустойчивого положения равновесия звеньев параллелограммов, которое соответствует расположению точек а, б, д, е на одной прямой, равно как и расположение точек г, в, з, ж тоже на одной прямой. До соприкосновения хвостовика 7 с упором 8 губки 4 неподвижны относительно корпуса 1. Продолжая выдвижение звена со схватом, автооператор вводит хвостовик 7 в контакт с упором 8 и в следующие моменты движения происходит поворот звена с хвостовиком 7 вокруг оси, проходящей через точку д (поворот вокруг оси против часовой стрелки, фиг. 2), вследствие того, что упор 8 неподвижен, а корпус 1 с осью поворота звена с хвостовиком 7 движется слева направо. Звено с хвостовиком 7 поворачивается и приводт в движение губки 4. Одновременное движение губок 4 происходит благодаря копиру 15, связывающему обе губки. Поворот звена с хвостовиком 7 под действием упора 8 происходит до того, как звенья параллелограммов абвг и дежз принимают неустойчивое равновесие, т. «. точки а, б, д, е занимают положение на одной прямой (фиг. 3). Затем, вследствие движения корпуса 1, звенья параллелограммов абвг и дежз выходят из неустойчивого равновесия. Движение губок 4 происходит под действием пружины 11. Хвостовик 7 теряет контакт с упором 8. Губки под действием пружины 11 сближаются, захватывая деталь 10. Синхронное сближение губок 4 осуществляется посредством копира 15, связывающего обе губки. Движение корпуса 1 должно осуществляться до тех пор, пока будет пройдено положение неустойчивого равновесия (фиг. 3), после чего корпус 1 неподвижен, а губки 4 сжимаются под действием пружины 11 и захватывают деталь 10. Дальнейшее движение автооператора с целью транспортирования происходит с зажатым объектом 10 манипулирования до взаимодействия губок 4 с упором 8 (фиг. 5), после которого движение корпуса 1 еще продолжается до достижения неустойчивого равновесия в звеньях параллелограммов, а именно а, б, д, е расположатся на одной прямой, и прекращается сразу после прохождения положения равновесия звеньев схвата. ДвижеЛ С.Пг1/1 L/ClUll .l ./Viiu л„л1ич ч.. ,, .- ние губок 4 относительно корпуса 1 осуществляется благодаря пружине 11, которая поджимает губки 4 к плоскости корпуса 1 и фиксирует их в раскрытом положении. Объект 10 манипулирования освобожден, а схват подготовлен к захвату следующего объекта манипулирования. Применение схвата предлагаемой конструкции позволяет сократить время на его переналадку. Кроме того, применение схвата позволит повысить точность позиционирования объекта манипулирования относительно тех нологического оборудования.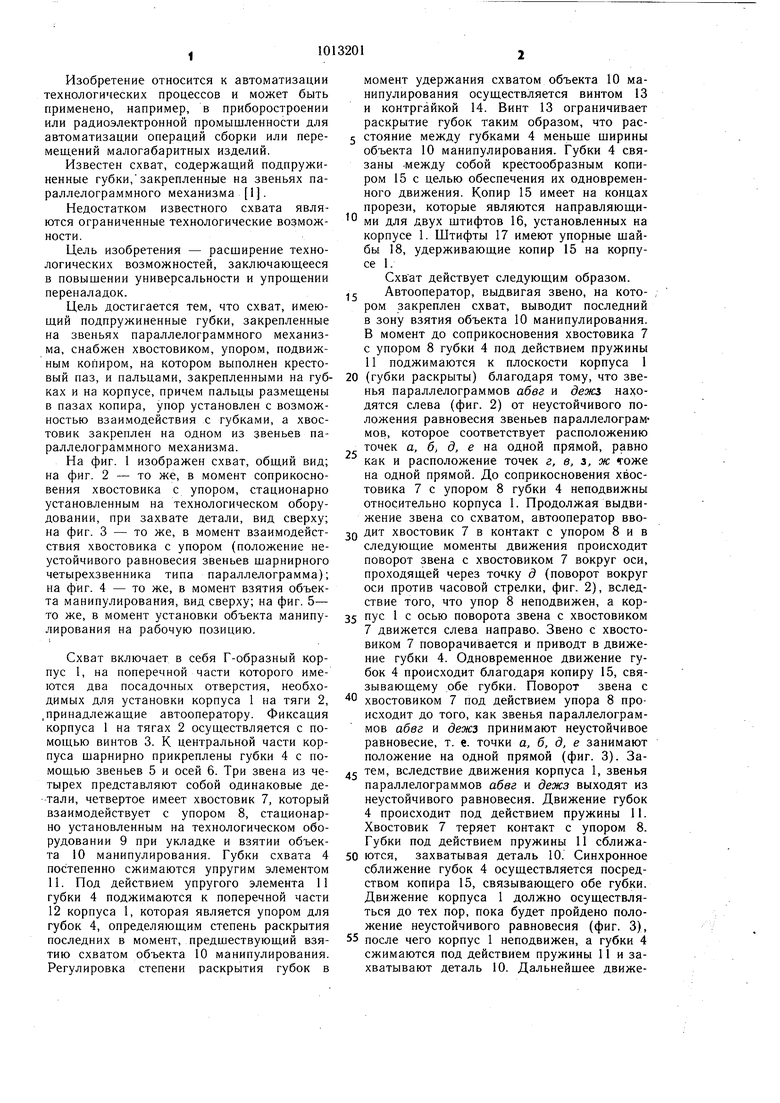
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1983 |
|
SU1079429A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Схват | 1981 |
|
SU921852A1 |
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
СХВАТ, содержащий подпружиненные губки, закрепленные на звеньях параллелограммного механизма, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен хвостовиком, упором, подвижным копиром, на котором выполнен крестовый паз, и пальцами, закрепленными на губках и на корпусе, причем пальцы размещены в пазах копира, упор установлен с -возможностью взаимодействия с губками, а хвостовик закреплен на одном из звеньев параллелограммного механизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват промышленного робота | 1976 |
|
SU580114A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
