Изобретение относится к области машиностроения, в частности к шарнирно рычажным механизмам и может найти применение в качестве простых по конструкции и управлению компактных приводов с одним вращательным двигателем для перемещения и ориентации, например, рефлектора антенны и радиолокаторов или других складывающихся конструкций и каркасов зданий.
Известен параллелограммный механизм привода рефлектора антенны, содержащий три приводных двигателя и выполненный с применением двух сложных сферических шарниров (книга А.Ф. Крайнев «Механика машин. Фундаментальный словарь» - Москва, изд-во Машиностроение, 2000. - с. 35, схема привода) - аналог.
Недостатками известного параллелограммного механизма привода являются большие пространственные габариты и применение сложного привода с тремя двигателями для управления одним рабочим органом.
Наиболее близким по технической сущности и достигаемому эффекту является складывающийся многократный шарнирно-рычажный механизм, представляющий сложную сборку между собой различных рычажных звеньев в виде замкнутой кинематической цепи из шестизвенных замкнутых контуров, собираемых через цилиндрические шарниры со взаимно-перпендикулярными осями вращения (Patent CN 112550762 В от 02.12.2002 года, фиг. 3) - прототип.
Недостатками указанного многократного шарнирно-рычажного механизма являются:
1) Низкая жесткость складывающегося механизма в его разложенном положении, ограничивающая его грузоподъемность и точность позиционирования при перемещении крупногабаритных объектов большой площади (рефлекторы телескопов, здания, промоборудование).
2) Один двигатель приводит в движении на выходе только один рабочий орган.
3) Складывание механизма возможно только в одном направлении.
4) Сложность изготовления и сборки всей конструкции на основе большого множества рычажных звеньев со взаимно-перпендикулярными осями шарниров точно под углом β=90°.
В основу изобретения положена техническая задача образования складывающихся приводов для перемещения крупногабаритных объектов большой площади, выполненных в виде:
а) складывающегося в двух взаимно-перпендикулярных направлениях симметричного многоконтурного механизма;
б) механизмов двухэкранного локатора с изменяемой площадью экранов и расширенным рабочим пространством поиска цели;
в) складывающейся поворотной антенны с повышенной жесткостью экрана рефлектора.
Получение технического результата достигается за счет того, что в замкнутую кинематическую цепь шарнирного параллелограммного механизма введены дополнительные рычажные звенья, которые установлены параллельно звеньям шарнирного параллелограмма и соединены с последними через цилиндрические шарниры с параллельными осями вращения для образования подобных между собой замкнутых параллелограммных контуров, в которых шатуны соединены с крупногабаритными рабочими органами большой площади.
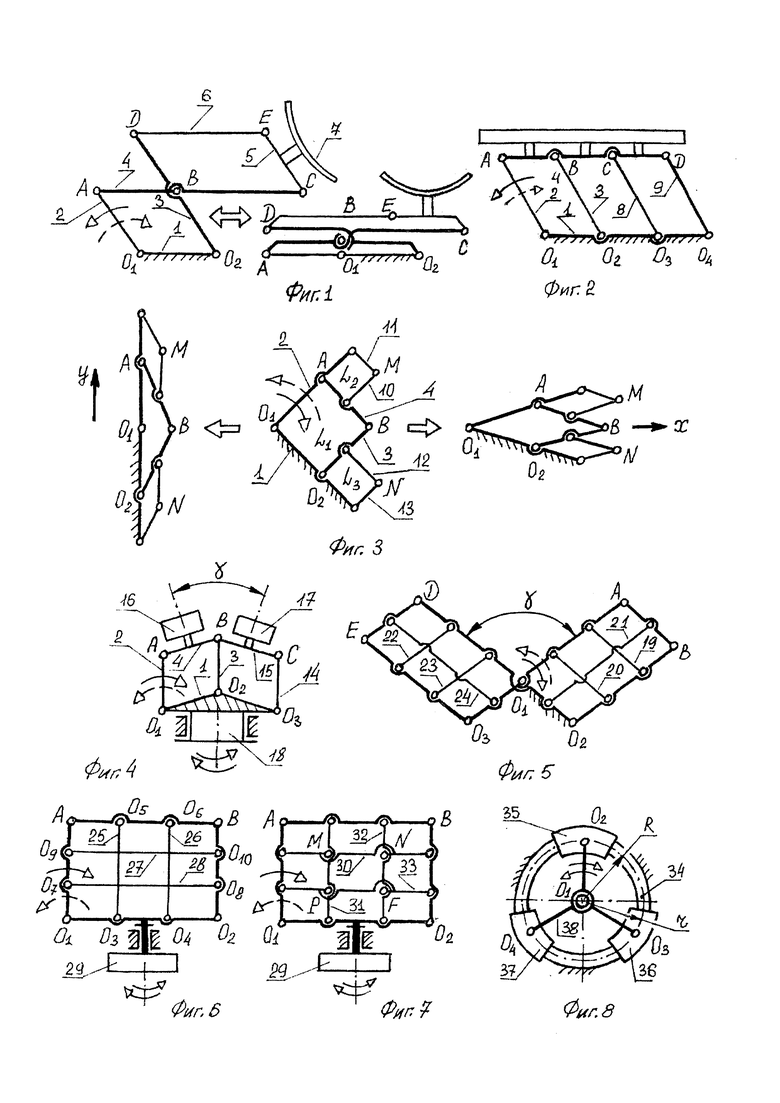
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7 и фиг. 8.
На фиг. 1 изображен общий вид складывающего многократного параллелограммного механизма, который включает стойку 1 с установленными на ней двумя параллельными кривошипами 2 и 3 и соединяющий их шатун 4. В замкнутую кинематическую цепь механизма введено два дополнительных рычажных звена 5 и 6. Рычажное звено 5 установлено параллельно кривошипам 2 и 3, а рычажное звено 6 установлено параллельно шатуну 4 и образует второй замкнутый параллелограмный контур DECB, подобные первому замкнутому параллелограммному контуру 01АВ02. Оба дополнительных рычажных звена 5 и 6 соединены между собой через цилиндрический шарнир Е с осью вращения, параллельной осям вращения шарниров 01, 02, А, В, С и D параллелограммного механизма - для образования простого двухконтурного шестизвенного привода ориентации рефлектора, соединенного со звеном 5 в виде шатуна ЕС.
На фиг. 2 представлен вариант выполнения параллелограммного механизма, в замкнутую кинематическую цепь которого введено два раздельно расположенных между собой дополнительных рычажных звена 8 и 9 одинаковой с кривошипами 2 и 3 длины, равной (С03=D04=01А=02В). Дополнительные рычажные звенья 8 и 9 установлены между стойкой 1 (вдоль ее длины 0104) и шатуном 4 (вдоль его длины AD) и расположены параллельно кривошипам 2 и 3 - для образования шестизвенного трехконтурного (контуры 01АВ02, 02ВС03 и 03CD04) механизма складывающейся опоры большой жесткости и грузоподъемности.
На фиг. 3 представлен вариант выполнения параллелограммного механизма, в замкнутую кинематическую цепь которого введено четыре дополнительных рычажных звена 10 и 11, 12 и 13. Дополнительные звенья 10 и 11 (попарно соединенные между собой через шарнир М) и дополнительные звенья 12 и 13 (попарно соединенные между собой через шарнир N) установлены соответственно параллельно кривошипам 2 и 3 (звенья 10 и 12) и шатуну 4 (звенья 11 и 13) для сборки трехконтурного (замкнутые контуру L1, L2 и L3) восьмизвенного механизма (звенья 1, 2, 3, 4, 10, 11, 12 и 13), складывающегося в двух взаимно-перпендикулярных направлениях, расположенных вдоль оси «x» и вдоль оси «у» - для образования симметричного трехконтурного шарнирного параллелограмма.
На фиг. 4 представлен вариант выполнения параллелограммного механизма, в замкнутую кинематическую цепь которого введено два шарнирно соединенных между собой через шарнир С дополнительных рычажных звена 14 и 15. Длина дополнительного рычажного звена 14 равна длине кривошипов 2 и 3 (С03=А01=В02), это звено 14 соединено со стойкой 1 через шарнир 03. Длина второго дополнительного рычажного звена 15 выполнена равной длине шатуна 4 (ВС=АВ); это звено 15 соединено с шатуном 4 и кривошипом 3 через двойной цилиндрический шарнир В - для образования складывающегося двухпараллелограммного механизма перемещения двух экранного локатора с постоянным углом γ взаиморасположения экраном 16 и 17 (γ=const). Для расширения рабочего пространства локатора стойка 1 механизма может быть установлена на поворотную платформу 18.
На фиг. 5 представлен вариант выполнения параллелограммного механизма двухконтурным с расположением внутри каждого из замкнутых контуров 0102АВ и 0103ED кинематической цепи дополнительных рычажных звеньев 19, 20, 21, 22, 23 и 24, например, в виде переплетенных между собой волокон. Дополнительные звенья 19 и 20 установлены параллельно стойке 0102, звено 21 - параллельно шатуну 02B, звенья 22 и 23 - параллельно кривошипу 0103, а звено 24 установлено параллельно шатуну 03Е.
В результате указанной сборки рычажных звеньев образуется регулируемой двухэкранный локатор с измененяемой площадью экранов 0102BA и 0103ED в процессе их складывания за счет регулирования угла γ их взаиморасположения (γ=var).
На фиг. 6 представлен вариант выполнения параллелограммного механизма, в замкнутую кинематическую цепь которого введен набор пересекающихся между собой дополнительных рычажных звеньев, состоящий из звеньев 25 и 26, установленных параллельно кривошипам 01А и 02B и выполненных одинаковой с ними длины (0305=0406=01А=02B); а также из звеньев 27 и 28, установленных параллельно шатуну АВ и выполненных одинаковой с ним длины (0708=09010=0102) - для образования многоконтурного механизма складывающегося рефлектора большой площади, который для расширения рабочего пространства рефлектора может быть установлен на поворотную платформу 29.
На фиг. 7 представлен вариант выполнения параллелограммного механизма, в котором пересекающиеся между собой дополнительные рычажные звенья 30, 31, 32 и 33 соединены между собой в точках их пересечения М и N, Р и F через цилиндрические шарниры с параллельными осями вращения - для образования складывающейся поворотной антенны с повышенной жесткостью экрана рефлектора, который для расширения рабочего пространства рефлектора может быть установлен на поворотную платформу 27.
На фиг. 8 представлен вариант выполнения поворотной платформы антенны рефлектора или локатора в виде многоконтурного шарнирного механизма, включающего основание в виде неподвижной круговой направляющей 34 с установленными на ней радиально-изогнутыми ползунами 35, 36 и 37, которые шарнирно соединены с поворотной крестовиной 38 (где 0102=0103=0104) вращательного привода и выполнены с радиусом изгиба «r» по средней линии, равным радиусу кривизны «R» по средней линии круговой направляющей 34 (r=R), а поворотная крестовина 38 сблокирована со стойкой складывающегося параллелограммного механизма для задания антенне шагового углового поворота или вращения вокруг вертикальной оси.
Работа представленного складывающегося параллелограммного механизма заключается в следующем.
При вращении ведущего кривошипа 2 с приводом от одного вращательного двигателя (в направлении, показанном сплошной стрелкой) происходит сближение между собой всех шарнирно соединенных между собой рычажных звеньев механизма вдоль одной из осей (фиг. 1-фиг. 8), что обеспечивает компактность механизма и его быстрее складывание без трудоемкой разборки и последующей сборки всей многозвенной замкнутой кинематической цепи механизма, что упрощает управление механизмом и регулирование положения в рабочем пространстве всех его звеньев и связанных с ними выходных рабочих органов.
При вращении ведущего кривошипа 2 с приводом от того же одного вращательного двигателя в противоположном направлении (показанном на фиг. 1-фиг. 8 пунктирной стрелкой) - происходит раскладывание механизма за счет удаления рычажных звеньев друг от друга, что обеспечивает быстрое возвращение механизма в требуемое рабочее положение. Указанная работоспособность предлагаемого складывающегося механизма (фиг. 1-фиг. 8) подтверждена на его действующих моделях.
Достигаемый в предлагаемом механизме технический эффект заключается в образовании складывающихся приводов для перемещения крупногабаритных объектов большой площади, выполненных в виде:
1) Складывающегося в двух взаимно-перпендикулярных направлениях симметричного многоконтурного механизма.
2) Механизмов двухэкранного локатора с изменяемой площадью экранов и расширенным рабочим пространством поиска цели.
3) Складывающейся поворотной антенны с повышенной жесткостью экрана рефлектора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| МНОГОКОНТУРНЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751777C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к области машиностроения, в частности, к шарнирно-рычажным механизмам. Складывающийся многократный параллелограммный механизм, содержит стойку с двумя параллельными кривошипами и соединяющий их шатун. В механизм введены соединительные дополнительные рычажные звенья. Звенья установлены параллельно звеньям шарнирного параллелограммного механизма и соединены с ними через цилиндрические шарниры с параллельными осями вращения. Механизм имеет привод от одного вращательного двигателя. Имеется одновременно нескольких установленных на разных шатунах рабочих органов в виде двух взаиморасположенных между собой через угол γ экранов локатора. Достигается упрощение конструкции. 5 з.п. ф-лы, 8 ил.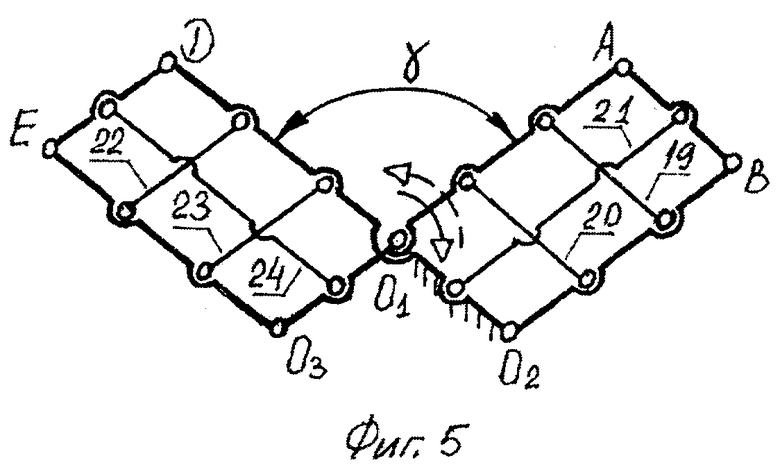
1. Складывающийся многократный параллелограммный механизм, преимущественно, антенны рефлектора, содержащий замкнутую кинематическую цепь, включающую шарнирный параллелограммный механизм, содержащий стойку с двумя параллельными кривошипами и соединяющий их шатун, отличающийся тем, что в замкнутую кинематическую цепь введены соединительные дополнительные рычажные звенья, которые установлены параллельно звеньям упомянутого шарнирного параллелограммного механизма и соединены с последними через цилиндрические шарниры с параллельными осями вращения для образования подобных между собой замкнутых параллелограммных контуров, в которых шатуны соединены с крупногабаритными рабочими органами большой площади, например, выполненными в виде рефлектора или экранов локатора, а складывающийся многоконтурный шарнирный механизм выполнен с возможностью привода от одного вращательного двигателя одновременно нескольких установленных на разных шатунах рабочих органов, например, в виде двух взаиморасположенных между собой через угол γ экранов локатора.
2. Складывающийся многократный параллелограммный механизм по п. 1, отличающийся тем, что в замкнутую кинематическую цепь механизма введено четыре дополнительных рычажных звена, попарно шарнирно соединенных между собой и установленных соответственно параллельно кривошипам и шатуну для сборки трехконтурного восьмизвенного механизма, складывающегося в двух взаимно-перпендикулярных направлениях, расположенных вдоль оси «х» и вдоль оси «у» для образования складывающегося симметричного трехконтурного шарнирного параллелограмма.
3. Складывающийся многократный параллелограммный механизм по п. 1, отличающийся тем, что в замкнутую кинематическую цепь введено два дополнительных шарнирно соединенных между собой рычажных звена, длина одного из дополнительных звеньев выполнена равной длине кривошипов шарнирного параллелограммного механизма, а длина второго дополнительного звена выполнена равной длине шатуна, второе дополнительное звено шарнирно соединено с шатуном и с одним из кривошипов через двойной цилиндрический шарнир для образования складывающегося двухпараллелограммного механизма перемещения двухэкранного локатора с постоянным углом γ взаиморасположения этих экранов.
4. Складывающийся многократный параллелограммный механизм по п. 1, отличающийся тем, что шарнирный параллелограммный механизм выполнен двухконтурным с расположением внутри каждого из замкнутых контуров кинематической цепи дополнительных рычажных звеньев, например, в виде переплетенных между собой волокон, установленных параллельно соответственно стойке, кривошипам и шатунам для образования двухэкранного регулируемого локатора с изменяемой площадью экранов и регулируемым углом γ их взаиморасположения.
5. Складывающийся многократный параллелограммный механизм по п. 1, отличающийся тем, что в замкнутую кинематическую цепь введен набор пересекающихся между собой дополнительных рычажных звеньев, которые соединены между собой в точках их пересечения через цилиндрические шарниры с параллельными осями вращения для образования складывающейся поворотной антенны с повышенной жесткостью экрана рефлектора большой площади.
6. Складывающийся многократный параллелограммный механизм по п. 3 и 5, отличающийся тем, что антенна рефлектора или локатора установлена на поворотную платформу, которая выполнена в виде многоконтурного шарнирного механизма, включающего основание в виде неподвижной круговой направляющей с установленными на ней радиально-изогнутыми ползунами, которые шарнирно соединены с поворотной крестовиной вращательного привода и выполнены с радиусом изгиба по средней линии, равным радиусу кривизны по средней линии упомянутой неподвижной круговой направляющей, а упомянутая поворотная крестовина сблокирована со стойкой складывающегося параллелограммного механизма для задания антенне шагового углового поворота или вращения вокруг вертикальной оси.
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| Устройство для погружения и извлечения сваи, шпунта | 1974 |
|
SU497379A1 |
| US 2003233102 A1, 18.12.2003 | |||
| ПРИСПОСОБЛЕНИЕ К ВИНТОРЕЗНОЙ МАШИНЕ ДЛЯ НАМОТКИ НА КАТУШКИ НАВИНТОВАННОЙ ПРОВОЛОКИ | 1927 |
|
SU7686A1 |
| Боковой грунтонос для мягких пород | 1987 |
|
SU1470947A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 2019 |
|
RU2720514C1 |

