4f:aas s
4rii
/
Изобретение относится к керамической промышленности, к манипулирующим устройствам, используемым для съема с пресса отформованных сырых изделий из пластичных композиций и переноса с кантованием их и выдачей в устойчивом положении на сетчатый конвейер для последующей сущки.
Цель изобретения - повышение производительности и точности позиционирования захватов.
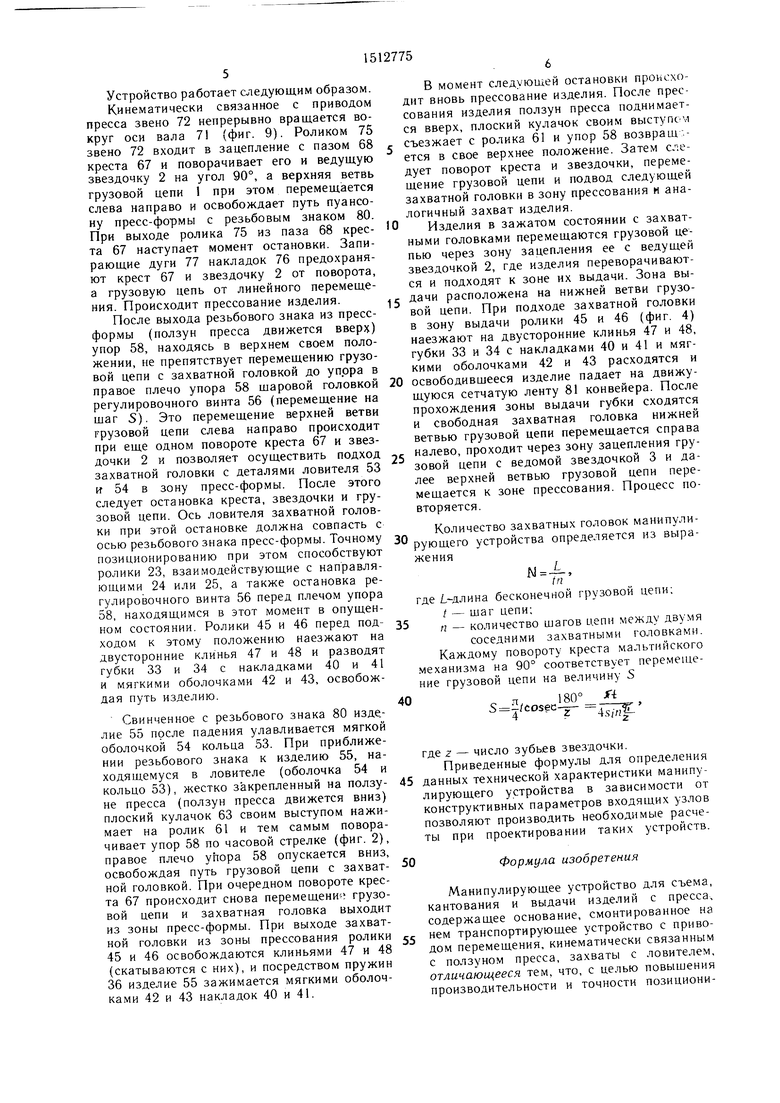
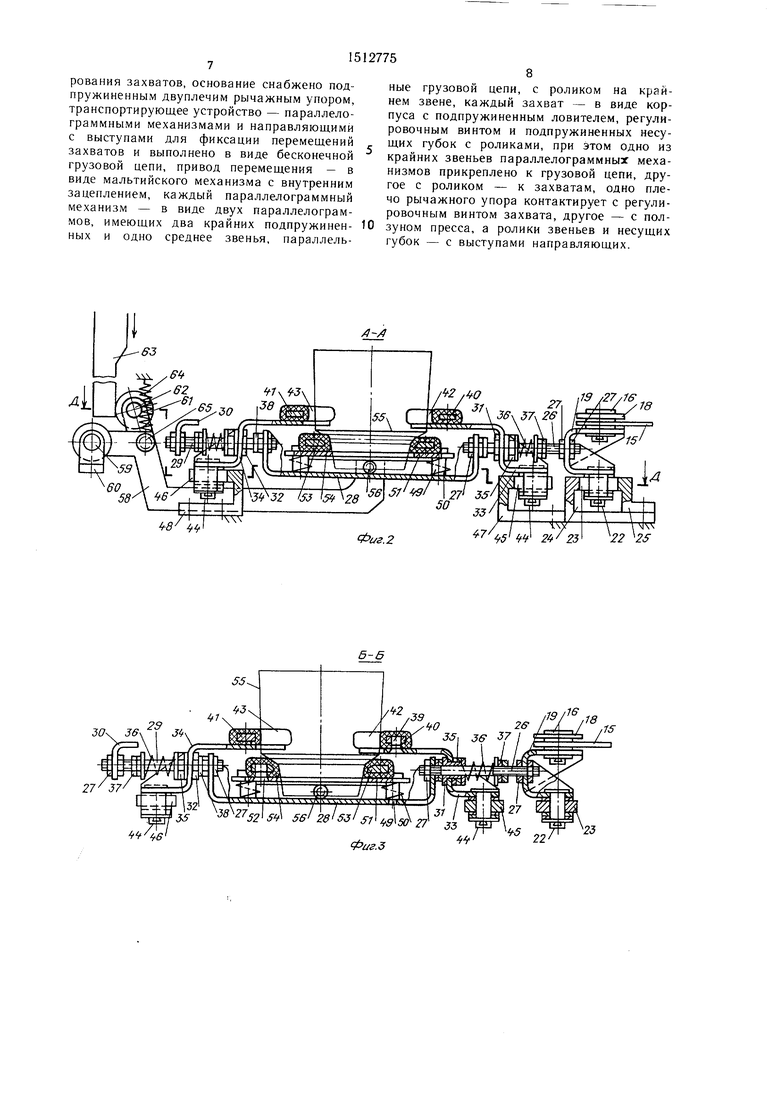
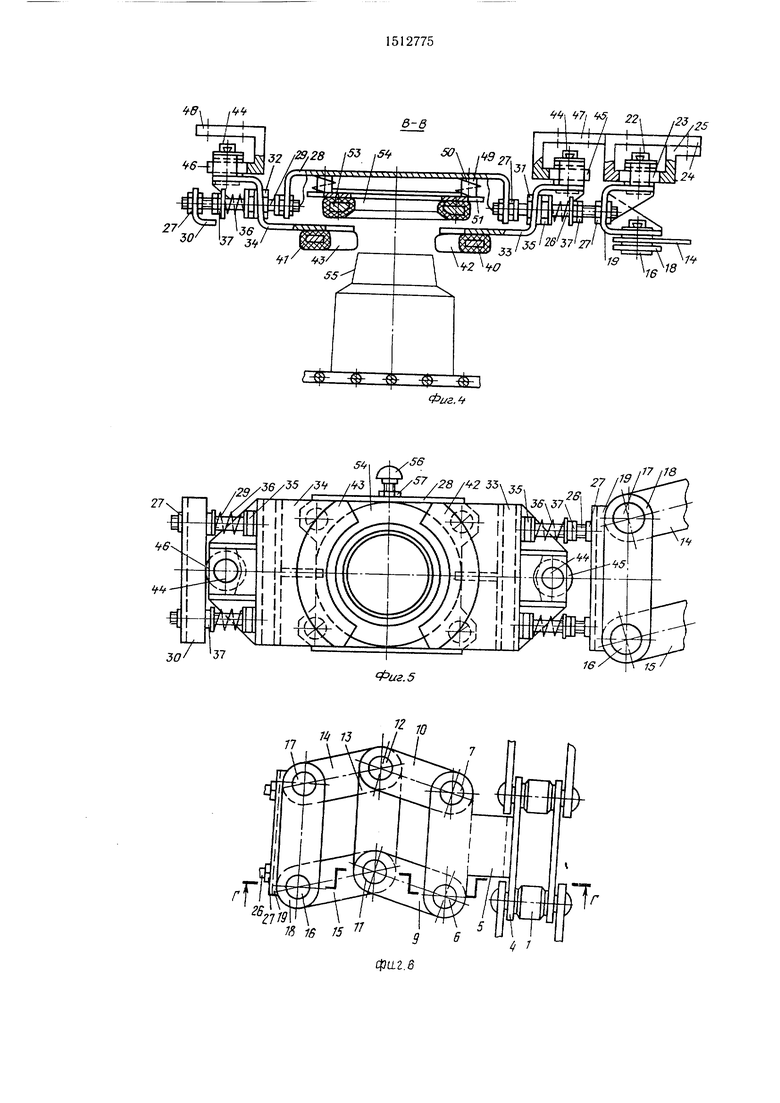
На фиг. 1 изображено устройство, охватывающее стол пресса; на фиг. 2 - разрез А-А на фиг. 1 (момент захватывания изделия); на фиг. 3 - разрез Б-Б
ственно подпружиненные несущие нравая 33 и левая 34 губки посредством гаек 35. Втулки 31 и 32 совместно с губками 33 и 34 имеют возможность свободно перемещаться соответственно относительно щпилек 26 и 29 и подпружинены посредством пружин 36, усилие которых регулируется с помощью гаек 37. Крайние положения губок 33 и 34 выставляются посредством сменных шайб 38. На верхних концах каждой из гу- 10 бок 33 и 34 закреплены посредством винтов 39 соответственно накладки 40 и 41, покрытые мягкими оболочками 42 и 43. На нижнем, отогнутом к периферии конце каждой из губок закреплены пальцы 44
на фиг. I (момент транспортирования из- имеющие возможность свободного враще- делия); на фиг. 4 - разрез В-В на фиг. 1ния вокруг этих пальцев ролики 45 и 46.
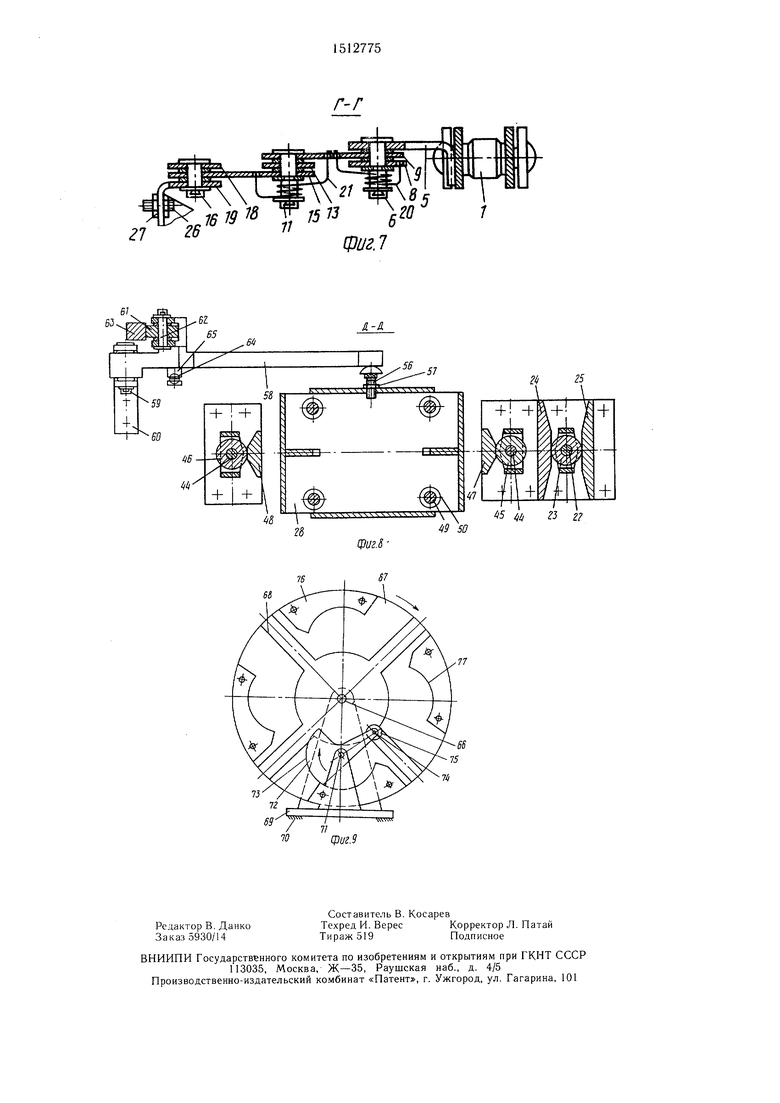
(момент выдачи изделия); на фиг. 5 - захват, вид сверху; на фиг. 6 - парал- лелограммный механизм, вид сверху; на фиг. 7 - разрез Г-Г на фиг. 6; на фиг. 8 - разрез Д-Д на фиг. 2 (момент захвата 20 изделия); на фиг. 9 - мальтийский механизм с внутренним зацеплением.
Манипулирующее устройство содержит грузовую цепь 1, находящуюся в зацеплении с ведущей 2 и ведомой 3 звездоч- j, ками.
Каждое кратное определенному числу звено 4 грузовой цепи I жестко соединено посредством кронштейна 5 и пальцев 6 и 7 {фиг. 6 и 7) со звеньями 8-10 механизма двойного параллелограмма. Звенья 9 и 10 30 может упираться в одно плечо убирающе- с помощью пальцев 11 и 12 соединены со г&ся подпружиненного двуплечего рычажно- звеньями 13-15, а звенья 14 и 15 посред- го упора 58, закрепленного на пальце 59 ством пальцев 16 и 17 соединены со зве- стойки 60. Упор 58 может свободно пово- ньями 18 и 19. Звенья 9 и 10 могут рачиваться вокруг пальца 59 и на втором свободно поворачиваться вокруг пальцев 6, его плече закреплен ролик 61, свободно по- 7, 11 и 12, а звенья 14 и 15 - во- 35 ворачивающийся вокруг пальца 62. Ролик круг пальцев 11, 12, 16 и 17. Звено 9 61 прижимается к плоскому кулачку 63 пол- подпружинено относительно звена 8 посред- зуна пресса посредством пружины 64 через
Ролики 45 и 46 имеют возможность взаимодействовать соответственно с двусторонними клиньями 47 и 48, жестко закрепленными на основании.
На корпусе 28 установлены направляющие винты 49, на которых одето подпружиненное посредством пружин 50 основание ловителя 51. На основании 51 посредством винтов 52 закреплено кольцо 53, покрытое мягкой оболочкой 54, соприкасающей ся непосредственно с изделием 55.
С передней стороны (по ходу движения) в корпус 28 ввинчен регулировочный винт 56 со стопорной гайкой 57. Регулировочный винт 56 своей щаровой поверхностью
ством пружины 20 таким образом, что бы угол между звеньями 8 и 9 был острым, а звено 15 подпружинено относительно звена 9 с помощью пружины 21 таким образом, чтобы угол между звеньями 9 и 15 был тупым.
На звене 19 закреплен палец 22 и имеющий возможность свободного вращения во40
стойку 65, связанную с упором 58.
Ведущая звездочка 2 жестко связана с валом 66 механизма с остановками, выполненного по типу зубчато-цевочного механизма мальтийского креста с внутренним зацеплением с четырьмя пазами. На валу 66 жестко закреплен мальтийский крест 67 с радиальными пазами 68. Вал 66 закреплен
круг пальца 22 ролик 23 (фиг. 2-4). В мо- 45 подшипниках стойки 69, а последняя -
на основании 70. В подшипниках стойки 69 установлен вал 71, кинематически связанный с приводом пресса. На валу 71 жестко закреплено звено 72 с дугой 73, несущее на оси 74 ролик 75. На кресте 67 50 закреплены накладки 76 с запирающими дугами 77.
Грузовая цепь 1 своей верхней ветвью расположена над столом 77 пресса и нижней частью пресс-формы 78, а захватные головки расположены губками 33 и 34 вверх
захватной головки. На безрезьб овой части 55 к ползуну пресса 79 и резьбовому знаку 80 шпилек 26 (2 шт.) установлены резьбовые верхней части пресс-формы. Нижняя ветвь втулки 31, а на безрезьбовой части шпи- грузовой цепи расположена над лентой 81 лек 29 (2 шт.) - резьбовые втулки 32. сетчатого конвейера и захватные головки На втулках 31 и 32 закреплены соответ-здесь расположены губками 33 и 34 вниз.
1мент захвата изделия ролик 23 контактирует с направляюшей 24 или 25. Минимальное расстояние между направляющими 24 и 25 больше диаметра ролика на величину гарантированного зазора.
Звено 19 посредством шпилек 26 и гаек 27 соединено с корпусом 28 захватной головки, а корпус 28 с помошью шпилек 29 и гаек 27 соединен с уголком 30. Таким образом, детали 19, 26-30 образуют каркас
ственно подпружиненные несущие нравая 33 и левая 34 губки посредством гаек 35. Втулки 31 и 32 совместно с губками 33 и 34 имеют возможность свободно перемещаться соответственно относительно щпилек 26 и 29 и подпружинены посредством пружин 36, усилие которых регулируется с помощью гаек 37. Крайние положения губок 33 и 34 выставляются посредством сменных шайб 38. На верхних концах каждой из гу- бок 33 и 34 закреплены посредством винтов 39 соответственно накладки 40 и 41, покрытые мягкими оболочками 42 и 43. На нижнем, отогнутом к периферии конце каждой из губок закреплены пальцы 44
имеющие возможность свободного враще- ния вокруг этих пальцев ролики 45 и 46.
может упираться в одно плечо убирающе- г&ся подпружиненного двуплечего рычажно- го упора 58, закрепленного на пальце 59 стойки 60. Упор 58 может свободно пово- рачиваться вокруг пальца 59 и на втором его плече закреплен ролик 61, свободно по- ворачивающийся вокруг пальца 62. Ролик 61 прижимается к плоскому кулачку 63 пол- зуна пресса посредством пружины 64 через
Ролики 45 и 46 имеют возможность взаимодействовать соответственно с двусторонними клиньями 47 и 48, жестко закрепленными на основании.
На корпусе 28 установлены направляющие винты 49, на которых одето подпружиненное посредством пружин 50 основание ловителя 51. На основании 51 посредством винтов 52 закреплено кольцо 53, покрытое мягкой оболочкой 54, соприкасающей ся непосредственно с изделием 55.
С передней стороны (по ходу движения) в корпус 28 ввинчен регулировочный винт 56 со стопорной гайкой 57. Регулировочный винт 56 своей щаровой поверхностью
может упираться в одно плечо убирающе- г&ся подпружиненного двуплечего рычажно- го упора 58, закрепленного на пальце 59 стойки 60. Упор 58 может свободно пово- рачиваться вокруг пальца 59 и на втором его плече закреплен ролик 61, свободно по- ворачивающийся вокруг пальца 62. Ролик 61 прижимается к плоскому кулачку 63 пол- зуна пресса посредством пружины 64 через
стойку 65, связанную с упором 58.
Ведущая звездочка 2 жестко связана с валом 66 механизма с остановками, выполненного по типу зубчато-цевочного механизма мальтийского креста с внутренним зацеплением с четырьмя пазами. На валу 66 жестко закреплен мальтийский крест 67 с радиальными пазами 68. Вал 66 закреплен
подшипниках стойки 69, а последняя -
Устройство работает следующим образом.
Кинематически связанное с приводом пресса звено 72 непрерывно вращается вокруг оси вала 71 (фиг. 9). Роликом 75 звено 72 входит в зацепление с пазом 68 креста 67 и поворачивает его и ведущую звездочку 2 на угол 90°, а верхняя ветвь грузовой цепи 1 при этом перемещается слева направо и освобождает путь пуансону пресс-формы с резьбовым знаком 80. При выходе ролика 75 из паза 68 креста 67 наступает момент остановки. Запирающие дуги 77 накладок 76 предохраняют крест 67 и звездочку 2 от поворота, а грузовую цепь от линейного перемещения. Происходит прессование изделия.
После выхода резьбового знака из пресс- формы (ползун пресса движется вверх) упор 58, находясь в верхнем своем положении, не препятствует перемещению грузовой цепи с захватной головкой до упора в
В момент следующей остановки происходит вновь прессование изделия. После прессования изделия ползун пресса поднимается вверх, плоский кулачок своим выступом
г съезжает с ролика 61 и упор 58 возвращ:.- ется в свое верхнее положение. Затем следует поворот креста и звездочки, перемещение грузовой цепи и подвод следующей захватной головки в зону прессования и аналогичный захват изделия.
О Изделия в зажатом состоянии с захватными головками перемещаются грузовой цепью через зону зацепления ее с ведущей звездочкой 2, где изделия переворачиваются и подходят к зоне их выдачи. Зона выхс дачи расположена на нижней ветви грузовой цепи. При подходе захватной головки в зону выдачи ролики 45 и 46 (фиг. 4) наезжают на двусторонние клинья 47 и 48, губки 33 и 34 с накладками 40 и 41 и мягкими оболочками 42 и 43 расходятся и
правое плечо упора 58 щаровой головкой 20 освободивщееся изделие падает на движу- регулировочного винта 56 (перемещение на щуюся сетчатую ленту 81 конвейера. После щаг S). Это перемещение верхней ветви грузовой цепи слева направо происходит при еще одном повороте креста 67 и звездочки 2 и позволяет осуществить подход захватной головки с деталями ловителя 53 W 54 в зону пресс-формы. После этого следует остановка креста, звездочки и грузовой цепи. Ось ловителя захватной голов25
прохождения зоны выдачи губки сходятся и свободная захватная головка нижней ветвью грузовой цепи перемещается справа налево, проходит через зону зацепления грузовой цепи с ведомой звездочкой 3 и далее верхней ветвью грузовой цепи перемещается к зоне прессования. Процесс повторяется.
В момент следующей остановки происходит вновь прессование изделия. После прессования изделия ползун пресса поднимается вверх, плоский кулачок своим выступом
съезжает с ролика 61 и упор 58 возвращ:.- ется в свое верхнее положение. Затем следует поворот креста и звездочки, перемещение грузовой цепи и подвод следующей захватной головки в зону прессования и аналогичный захват изделия.
О Изделия в зажатом состоянии с захватными головками перемещаются грузовой цепью через зону зацепления ее с ведущей звездочкой 2, где изделия переворачиваются и подходят к зоне их выдачи. Зона выс дачи расположена на нижней ветви грузовой цепи. При подходе захватной головки в зону выдачи ролики 45 и 46 (фиг. 4) наезжают на двусторонние клинья 47 и 48, губки 33 и 34 с накладками 40 и 41 и мягкими оболочками 42 и 43 расходятся и
освободивщееся изделие падает на движу- щуюся сетчатую ленту 81 конвейера. После
прохождения зоны выдачи губки сходятся и свободная захватная головка нижней ветвью грузовой цепи перемещается справа налево, проходит через зону зацепления грузовой цепи с ведомой звездочкой 3 и далее верхней ветвью грузовой цепи перемещается к зоне прессования. Процесс повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1134264A1 |
| Установка для армирования керамических изделий | 1985 |
|
SU1346432A1 |
| Установка для прессования,съема и загрузки изделий на конвейер | 1984 |
|
SU1238969A1 |
| Автомат для подготовки проводов к монтажу | 1987 |
|
SU1457041A1 |
| Устройство для зигзагообразного фальцевания бумажной полосы | 1982 |
|
SU1193088A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Многопозиционная машина для вставки книжных блоков в переплетные крышки | 1956 |
|
SU119170A1 |
| Гибкий производственный модуль для штамповки изделий из ленточного материала | 1989 |
|
SU1713709A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для транспортировки и сортировки изделий | 1988 |
|
SU1623870A1 |
Изобретение относится к производству керамических изделий, а именно к манипулирующим устройствам, используемым для съема с пресса отформованных сырых изделий из пластичных композиций и переноса их с кантованием и выдачей на сетчатый конвейер для последующей сушки. Изобретение позволяет повысить производительность и точность позиционирования захватов. Манипулирующее устройство для съема, кантования и выдачи изделий с пресса содержит основание, смонтированное на нем транспортирующее устройство с приводом перемещения, кинематически связанное с ползуном пресса, захваты с ловителем. Основание снабжено подпружиненным двуплечим рычажным упором, транспортирующее устройство - параллелограммными механизмами, направляющими выступами для фиксации перемещений захватов и выполнено в виде бесконечной грузовой цепи 1, привод перемещения - в виде мальтийского механизма с внутренним зацеплением. 9 ил.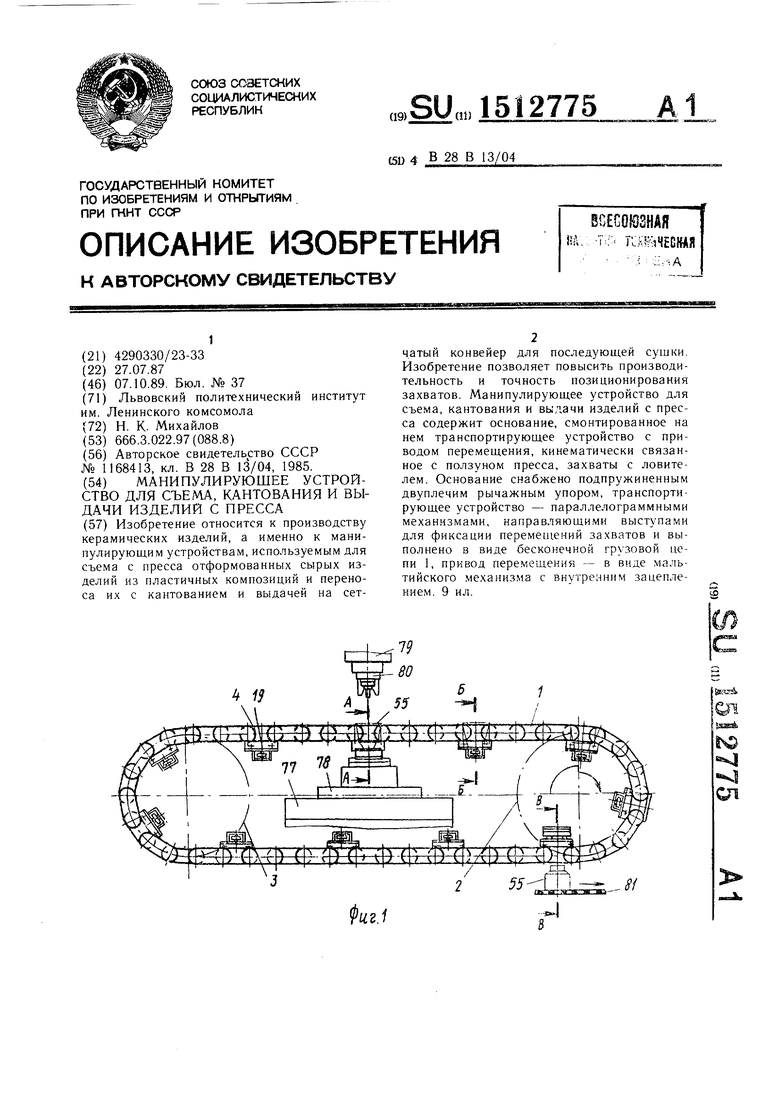
ки при этой остановке должна совпасть с осью резьбового знака пресс-формы. Точному
Количество захватных головок манипулиосью резьоового знака пресс-формы, ючному -цп- „ ,. „,,,ло
- JU пующего устройства определяется из выраПОЗИЦИОНИрОВаНИЮ при этом способствуютnyiuiueiu yv.ipunv.рмI
ролики 23, взаимодействующие с направляющими 24 или 25, а также остановка регулировочного винта 56 перед плечом упора 58, находящимся в этот момент в опущенном состоянии. Ролики 45 и 46 перед подходом к этому положению наезжают на двусторонние клинья 47 и 48 и разводят губки 33 и 34 с накладками 40 и 41 и мягкими оболочками 42 и 43, освобождая путь изделию.
Свинченное с резьбового знака 80 изделие 55 после падения улавливается мягкой оболочкой 54 кольца 53. При приближении резьбового знака к изделию 55, находящемуся в ловителе (оболочка 54 и
жения
,
П
35
40
где L-длина бесконечной грузовой цепи; / - щаг цепи;
,; - количество шагов цепи между двумя соседними захватными головками. Каждому повороту креста мальтийского механизма на 90° соответствует перемещение грузовой цепи на величину S
f-t
е л,180°
S j/cosec:-
где Z - число зубьев звездочки.
Приведенные формулы для определения кольцо 53), жестко закрепленный на ползу- 45 данных технической характеристики манипу- не пресса (ползун пресса движется вниз)лирующего устройства в зависимости от
конструктивных параметров входящих узлов позволяют производить необходимые расчеплоский кулачок 63 своим выступом нажимает на ролик 61 и тем самым поворачивает упор 58 по часовой стрелке (фиг. 2), правое плечо упора 58 опускается вниз, освобождая путь грузовой цепи с захват- 50 ной головкой. При очередном повороте креста 67 происходит снова перемещени грузовой цепи и захватная головка выходит из зоны пресс-формы. При выходе захватной головки из зоны прессования ролики 45 и 46 освобождаются клиньями 47 и 48 (скатываются с них), и посредством пружин 36 изделие 55 зажимается мягкими оболочками 42 и 43 накладок 40 и 41.
55
ты при проектировании таких устройств. Формула изобретения
Манипулирующее устройство для съема, кантования и выдачи изделий с пресса, содержащее основание, смонтированное на нем транспортирующее устройство с приводом перемещения, кинематически связанным с ползуном пресса, захваты с ловителем, отличающееся тем, что, с целью повышения производительности и точности позициониКоличество захватных головок манипули- „ ,. „,,,ло
nyiuiuei
жения
,
П
35
40
где L-длина бесконечной грузовой цепи; / - щаг цепи;
,; - количество шагов цепи между двумя соседними захватными головками. Каждому повороту креста мальтийского механизма на 90° соответствует перемещение грузовой цепи на величину S
f-t
е л,180°
S j/cosec:-
ты при проектировании таких устройств. Формула изобретения
Манипулирующее устройство для съема, кантования и выдачи изделий с пресса, содержащее основание, смонтированное на нем транспортирующее устройство с приводом перемещения, кинематически связанным с ползуном пресса, захваты с ловителем, отличающееся тем, что, с целью повышения производительности и точности позиционирования захватов, основание снабжено подпружиненным двуплечим рычажным упором, транспортирующее устройство - параллело- граммными механизмами и направляющими с выступами для фиксации перемещений захватов и выполнено в виде бесконечной грузовой цепи, привод перемещения - в виде мальтийского механизма с внутренним зацеплением, каждый параллелограммный механизм - в виде двух параллелограмные грузовой цепи, с роликом на крайнем звене, каждый захват - в виде корпуса с подпружиненным ловителем, регулировочным винтом и подпружиненных несущих губок с роликами, при этом одно из крайних звеньев параллелограммныг механизмов прикреплено к грузовой цепи, другое с роликом - к захватам, одно плечо рычажного упора контактирует с регулировочным винтом захвата, другое - с полмов, имеющих два крайних подпружинен- Ю зуном пресса, а ролики звеньев и несущих ных и одно среднее звенья, параллель- губок - с выступами направляющих.
Л
27 37
ные грузовой цепи, с роликом на крайнем звене, каждый захват - в виде корпуса с подпружиненным ловителем, регулировочным винтом и подпружиненных несущих губок с роликами, при этом одно из крайних звеньев параллелограммныг механизмов прикреплено к грузовой цепи, другое с роликом - к захватам, одно плечо рычажного упора контактирует с регулировочным винтом захвата, другое - с пол зуном пресса, а ролики звеньев и несущих губок - с выступами направляющих.
/J-/I
27/1ff
/18
Фиг. 2
22 25
7J
Фиг.З
в 1
Jj/
30 37
17
1
16 15
Фиг. 5
jg18
11
28
фиг.З
20
фиг Л
Л-Л
« lik з г
9 SO
сриг.д
111
| Устройство для съема керамических изделий с пресса | 1983 |
|
SU1168413A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
