Изобретение ОТПРОСИТСЯ к строительству, в частности к универсальным строительным машинам на базе тракторов, и предназначено для совершенствования их конструкции.
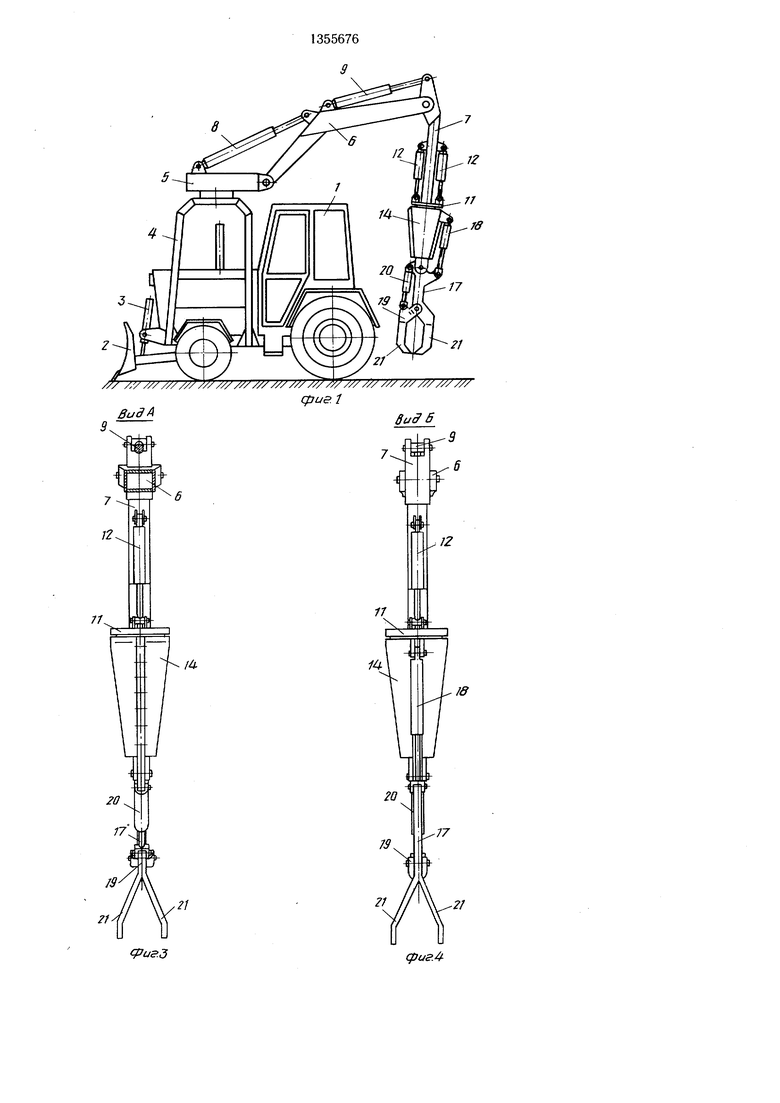
Цель изобретения - упрош,ение конструкции за счет использования стандартных гидроцилиндров. На фиг. 1 изображен общий вид строительного манипулятора; на фиг. 2 - рукоять строительного манипулятора с рабочим органом; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - манипулятор гфи выполнении монтажных операций; на фиг. 6 - то же, вид сверху; на фиг. 7 -- .манипулятор при производстве работ по рыхлению прочных и мерзлых грунтов.
Сроительный манипулятор включает базовую машину с бульдозерным отвалом 2, гидроцилиндр управления 3 отвалом 2. Над базовой машиной 1 установлена опорная рама 4 со смонтированной на ее верху поворотной платформой 5. К поворотной платформе 5 шарнирно присоединена стрела 6, на конце которой шарнирно смонтирована рукоять 7. Стрела 6 и рукоять 7 снабжены гидроцилиндрами управления 8 и 9. На боковой поверхности рукояти 7 в.ыполнены продольные пазы 10, в которых установлен нажимной диск 11, связанный с рукоятью 7 посредством силовых гидроцилиндров 12. На конце рукояти 7 выполнен двухзаходный винт 13, который охватывается разъемным корпусом 14, являющимся наружным элементом винтовой пары, соединенным с нажимным диском 11 через подшипник 15. Подшипник 15 смонтирован на нажимном диске И с гю- мошью стопорного кольца 16. Угол подъема я винтовой линии двухзаходного винта 13 имеет такое значение, что отсутствует самоторможение разъемного корпуса при его перемешении вдоль двухзаходного винта 13. К нижней части разъемного корпуса шарнирно подвешен рабочий орган, состояц;ий из наружного рычага 17, соединенного с разъемным корпусом посредством гидроцилиндра 18, и внутреннего рычага 19, связанного.с наружным рычагом )7 с по.моплью гидроцилиндра 20. Нри этом, нижние рабочие части рычагов 17 и 19 выпо.пнены в виде расходящихся захватов 21.
Строительный манипулятор работает сле- дуюшим образом.
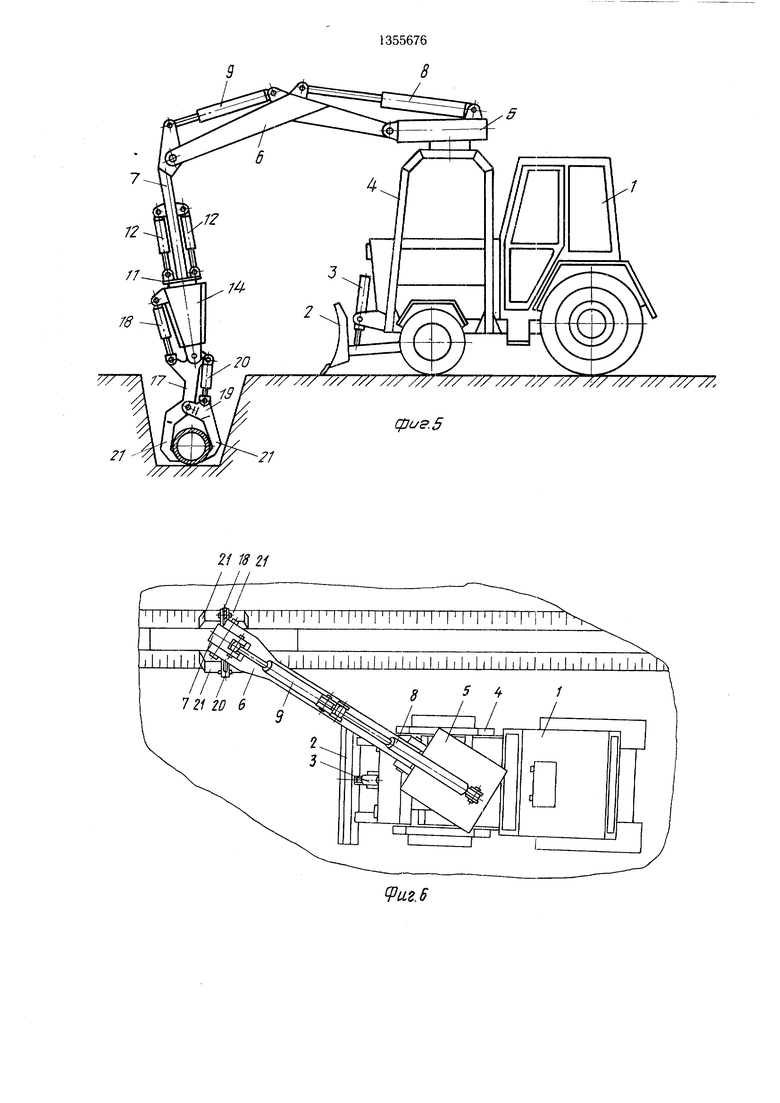
Базовая машина 1 вместе с оборудованием манипулятора, находящимся в транспортном положении, перемещается своим ходом к месту выполнения строитель),:ых работ. Сочетая движения стрелы 6, рукояти 7, наружного рычага 17, внутреннего рычага 19, управляемых соответствующими гидроцилиндрами 8,9,18,20, а также поворот всего рабочего органа вокруг своей продольной оси гидроцилиндрами 12, врашение поворотной платформы 5 и передвижение самой базовой машины 1, манипулятор позволяет выполнять погрузочно-разгру.зочные работы и монтажные работы со штучными грузами (фиг. 5,6).
Поворот рабочего органа вокруг своей 5 продольной оси осуществляется включением гидроцилиндров 12, которое приводит к перемещению нажимного диска 1 вдоль продольных пазов 10. Через подшипник 15 нажимной диск 11 оказывает силовое воздействие на разъемный корпус 14, по вора0 чивая его вместе с рабочим органом вокруг двухзаходного винта 13. Опускание нажимного диска 11 вдоль рукоятки 7 вниз приводит к повороту рабочего органа против часовой стрелки, и наоборот, подъем нажимнос го диска 11 - к повороту рабочего органа по часовой стрелке;. Поворот рабочего органа гидроцилиндрами 12 осуществляется из нейтрального положения (фиг. 2) по часовой или фотив часовой стрелки на 90°. Возможность изменить положение рычагов 17 и
0 19 вращением их вокруг продольной оси рукояти 7 позволяет производить монтажные работы (например, укладка бордюрных камней) в боковых зонах работы строительного манипулятора (фиг. 6), захватывать грузы, которые произвольно ориентированы
- в пространстве. При этом, до миниму.ма сокращается операция по передвижению или развороту базовой мащины 1.
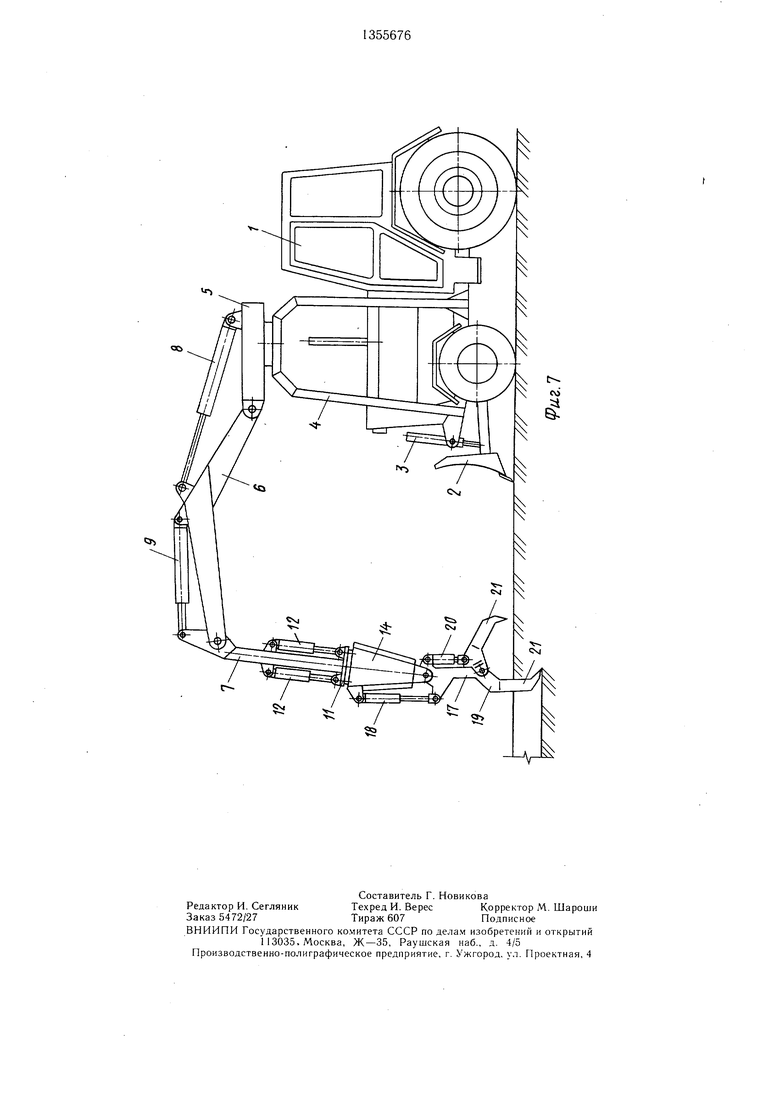
Предложенный строительный манипулятор дает возможности выполнять работу по рыхлению прочных и мерзлых грунтов. Для этого внутренний рычаг 19 с захватами 21 поворачивается против часовой стрелки гидроцилиндром 20 в верхнее крайнее положение. Далее, поворота.ми стрелы 6, рукоятки 7, наружного рычага 17 с помощью гидроци- линдров 8,9,18 осуществляется процесс рых- ления грунта захватами 21 наружного рычага 17.
Предлагаемый строительный манипулятор производит работы по срезу, перемещению и планировке грунта бульдозерным
0 отвалом 2, управляемым гидроцилиндром 3. Нри этом стрела 6 и рукоять 7 находятся в транспортно.м положении (фиг. 1). Формула изобретения Строительный манипулятор, включающий базовую машину, шарнирно установленную на ней стрелу, рукоять, шарнирно связанную со стрелой, рабочий орган и механизм поворота рабочего органа с винтовой парой с наружным я внутренним элементами и гндроцилиндром, связанным с руп коятью, отличающийся тем, что, с целью упрощения конструкции за счет использования стандартных гидроцилиндров, рукоять выполнена с продольными пазами и имеет установленный в них нажимной диск, при этом механизм поворота имеет дополнитель5 ный гидроцилиндр, а нажимной диск связан с наружным элементом винтовой пары посредством подшипников и с рукоятью связан гидроцилиндрами.
5
1Z
2J
fpue.d
сригЛ
//
//////
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1763587A1 |
| Лесомелиоративная машина | 1987 |
|
SU1469040A1 |
| Рабочее оборудование одноковшового экскаватора | 1987 |
|
SU1467140A1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1302000A1 |
| Рабочее оборудование гидравлического экскаватора | 1979 |
|
SU977594A1 |
| Рабочее оборудование гидравлического экскаватора | 2015 |
|
RU2612183C1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Рабочее оборудование экскаватора | 1989 |
|
SU1728392A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| Рабочее оборудование гидравлического экскаватора | 1988 |
|
SU1514877A1 |
Изобретение относится к строительству, в частности к универсальным строительным машинам на базе тракторов. Цель изобретения - упрощение конструкции за счет использования стандартных гидроцилиндров. Для этого рукоять (Р) 7 выполнена с продольными пазами 10 и имеет нажимной диск (НД) 11. Последний связан с Р 7 посредством силовых гидроцилиндров (ГЦ) 12. На конце Р 7 выполнен двухзаходный винт 13, который охватывается разъемным корпусом 14, являющимся наружным элементом винтовой пары, соединенным с НД 11 через под- щипники 15. Поворот рабочего органа вокруг своей оси осуществляется включением ГЦ 12, которое приводит к перемещению НД 11 вдоль пазов 10. Через подщипники 15 НД 11 оказывает воздействие на разъемный корпус 14, поворачивая его вместе с рабочим органом вокруг двухзаходного винта 13. При разработке прочих и мерзлых грунтов внутренний рычаг 19 с захватами 21 поворачивается ГЦ 20 в верхнее крайнее положение. Далее поворотами стрелы 6, Р 7, наружного рычага 17 с помощью ГЦ 9,18 осуществляется процесс рыхления грунта захватами 21. 7 ил. & (Л 12 со СП СЛ О5 О)
Vu.z.6
1
оо
Csj
| Рабочее оборудование гидравлического экскаватора | 1982 |
|
SU1081291A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочее оборудование экскаватора | 1985 |
|
SU1293282A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
