Изобретение относится к- электротехнике и может быть использовано в° электроприводах механизмов с двигателями постоянного тока 5 не имеющими встроенных тахогенераторов,
Целью изобретения является повышение быстродействия электропривода при сохранении широкого диапазона регулирования скорости.
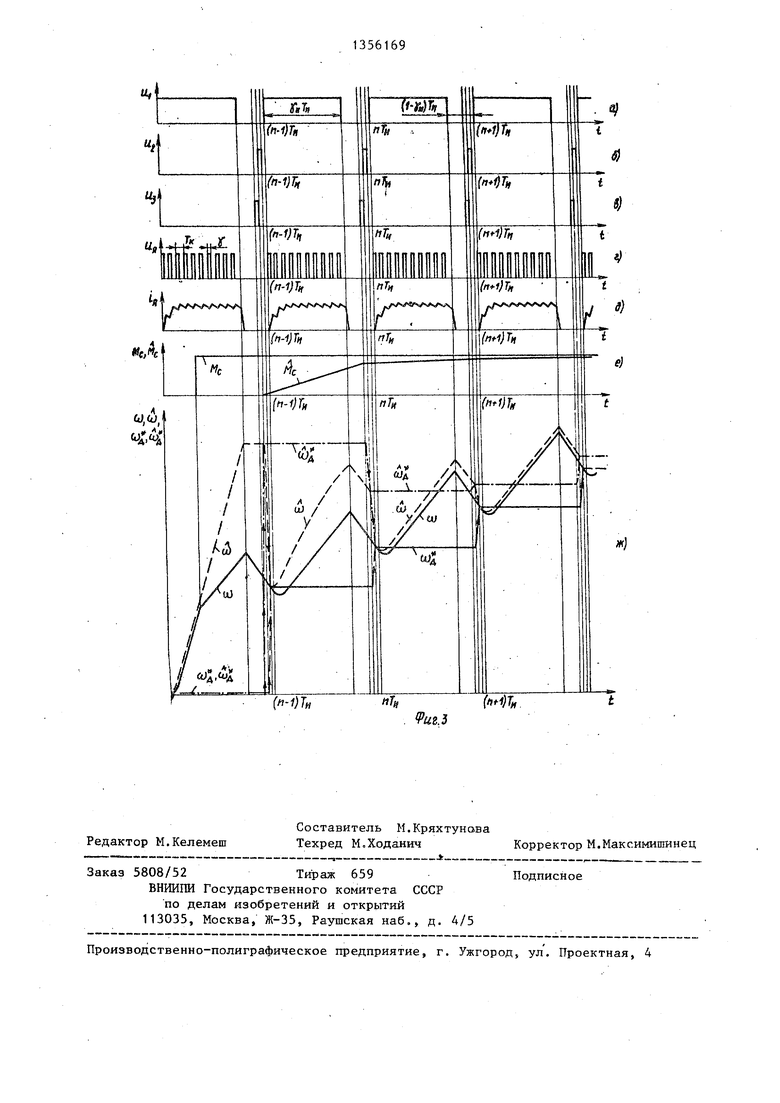
На фиг. 1 изображена функциональная .схема электроприводаIна фиг. 2 - то жеSблока вычисления мгновенной скорости вращения вала электродвигателя постоянного тока|на фиг. 3 - временные диаграммы,поясняющие работу электропривода.
Электропривод постоянного тока содержит электродвигатель 1 постоянного тока, датчик 2 напряженияяширот но-импульсный транзисторный преобразователь 3 с блоком А управления 5 ПИ регулятор 5 скорости, блок 6 задания скорости вращения, блок 7 запрета; блок 8 формирования временных интер- валов, блок 9 памяти, первый блок 10 потенциальной развязки, датчик 11 тока, второй блок 12 потенциальной развязки и блок 13 вычисления мгновенной скорости вращения вала электродвигателя 1 постоянного тока.
Широтно-импульсный преобразователь 3 выполнен на транзисторах по мостовой схеме. Выход преобразователя 3 через датчик 11 тока соединен с якорной обмоткой электродвигателя 13 параллельно которой подключен , датчик 2 напряжения, выполненный в виде резистивного делителя напряже- кия. Вход широтно-.импульсного преобразователя 3 подключен к вькоду блока 4 управления преобразователем, один вход 14 которого подключен к выходу пи-регулятора 5 скорости, а. другой вход 15 через блок 7 запрета подключен к первому выходу 16 блока 8 формирования временных интервалов. Кроме того, блок 8 формирования временныхинтервалов имеет выходы 17,18.Выход 17 подключен к первому входу 19 блока 9 памяти, второй вход 20 которого подключен к датчику 2 напряжения, а выход блока 9 памяти подключен к входу блока 10 потенциальной развязки.
Блок 13 первым входом 21 подключен к выходу первого блока 10 потенциальной развязки, вторьм входом 22 подключен через второй блок 12
потенциальной развязки к выходу датчика 11 тока, третьим входом 23 - к второму выходу 17 блока 8 формиро- вания временных интервалов,четвертым входом 24 - к третьему выходу 18 блока В, Выход 25 блока 13 подключен к первому входу 26 ПИ-регулятора 5 скорости,второй вход 27 которого подключен к выходу блока 6 задания скорости.
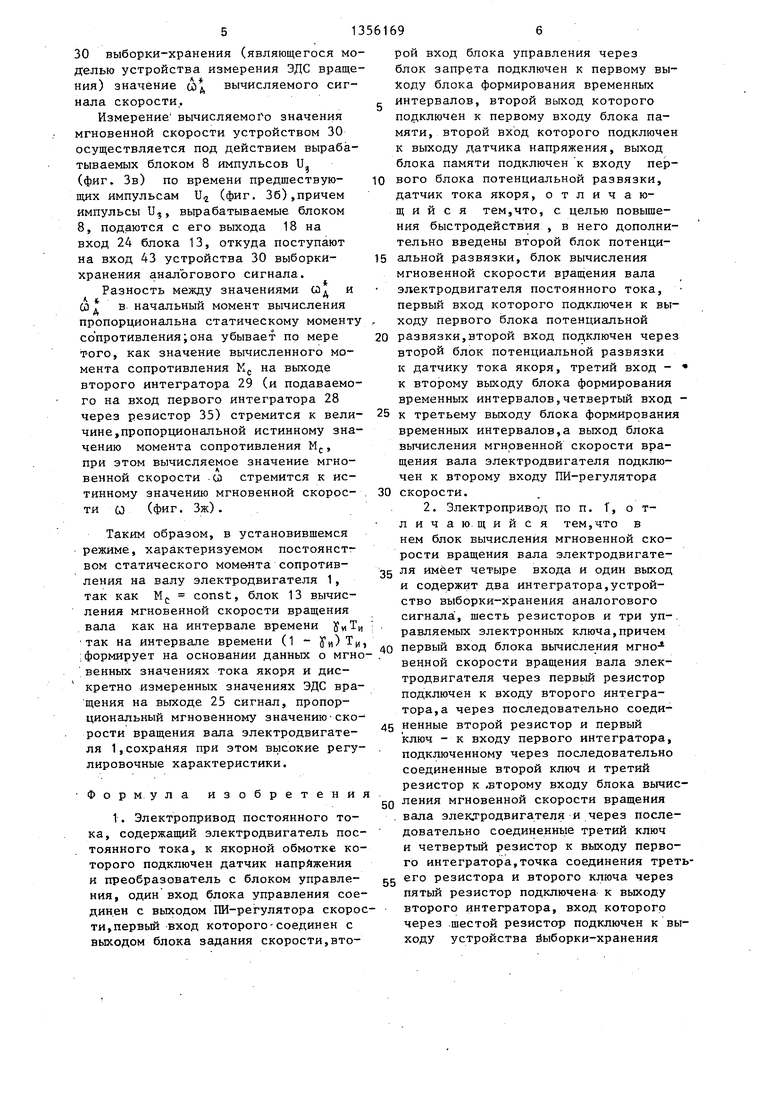
Блок 13 содержит (фиг, 2) первый 28 и второй 29 интеграторы,устройство 30 выборки-хранения аналогового
5 сигнала, первый 31, второй 32,третий 33, четвертый 34, пятый 35 и шестой 36 резисторы,первый 37,второй 38 и третий 39 управляемые электронные ключи, первый 40 и второй
0 41 конденсаторы5включенные в цепи обратных связей интеграторов 28,29.
Первый вход 21.блока 13 через первый резистор 31 подключен к входу интегратора 29, а через последо5 вательно соединенные второй резистор 32 и первый ключ 37 - к входу первого интегратора 28. Второй вход 22 блока 13 подключен через последовательно соединенные третий резистор
0 33 и второй 38 к входу первого,ко- |Торый через последовательно соединенные четвертый резистор 34 и третий ключ 39 подключен к выходу первого. Точка соединения третьего рер; зистора 33 и второго ключа 38 через пятый резистор 35 подключена к выходу второго интегратора 29, вход которого через шестой резистор 36 подключен к выходу устройства 30 вы0 борки-хранения, первый вход 42 которого подключен к выходу первого интегратора 28, а второй вход 43 - к четвертому входу 24 блока 13, третий вход 23 которого подключен к управ45 ляющим входам первого 37, второго 38 и третьего 39 ключей,Выход 25 блока 13 вычитания мгновенной скорости вращения вала подключен к выходу первого интегратора 28,
Электропривод работает следующим образом.
На интервале времени выходе 16 блока 8 формирования вре- менньпг интервалов су0;ествует импульс
gg напряжения U, (фиг. За),разрешающий с помощью блока 7 работу широтно- импульсного преобразователя 3. При этом напряжение U j на якоре электродвигателя (фиг, Зг) в течение време50
ни УИ Tj, представляет последовательность импульсов
ут
постоянной амплитуды с периодом следования Ту, и относительной продолжитель Y пропорциональной величи
ностью
If
не сигнала на входе 14 блока 4 управления широтно-импульсного преобразователя 3. Под действием напряжения Uj, течет ток I j, якоря электродвигателя 1 (фиг. Зб).
Сигнал, пропорциональный току якоря Ij (фиг. Зг) снимается с выхода второго блока 12 потенциальной развязки датчика 11 тока якоря и подает ся на второй вход 22 блока 13, при этом электронные ключи 37, 39 находятся в разомкнутом, а ключ 38 в замкнутом состоянии.
Вычисление мгновенного значения со скорости вращения вала электродвигателя 1 со (фиг. Зж) осуществляется первым интегратором 28 блока 13 на основании данных о токе якоря в моменте нагрузки электродвигателя 1, причем величина постоянной интегратора , определяемая значениями параметров резистора 33 и конденсатора 40, равна паспортному значению
механической постоянной Т электродвигателя 1 .
На интервале времени (1 -у,,) Tj, на выходе 16 блока 8 отсутствует импульс напряжения и блок 7 запрета формирует сигнал на запирание всех транзисторов силового моста, ток якоря, падает до нуля (фиг. Зд), замыкаясь, через обратные диоды моста встречно источнику питания. К концу интервала времени (1 - у„) Т когда ток якоря равен нулю, импульс Напряжения (фиг. Зб), разрешающий измерение ЭДС вращения, подается с выхода 17 блока 8 на первый вход 19 блока 9 памяти и на вход 23 блока 13
В течение времени существования импульса и в блоке 9 памяти происходит запись сигнала, снимаемого с датчика 2 напряжения, пропорционального ЭДС . вращения. К моменту окончания импульса и выходной сигнал первого блока 10 потенциальной развязки пропорционален ЭДС вращения.
В течение времени существования. импульса и электронные ключи 37,39 и 35 под действием импульса U переводятся соответственно в замкнутое и разомкнутое состояние.Таким образом, в блоке 13 образуется цепь
-10
- 15
561694
(первый вход 21, резистор 32, замкнутые ключи 37 и 39, резистор 34, первый интегратор 28) для коррекции
л
вычисляемого значения О мгновенной скорости до величины
измеренного значения ЭДС вращения со подаваемого на вход 21 блока 13 с выхода первого блока 10 потенциальной развязки 10. Значение вычисляемой мгновенной скорости сЬ корректируется измеряемого значения существования
до величины ЭДС W д в течение импульса и. Постоянная времени t с которой протекает коррекция,определяется параметрами резистора 34 и конденсатора 40.
В момент окончания импульса U ключи 37, 39 и 38 возвращаются в иc ходное состояние - соответственно открытое и закрытое,а блок 13 переходит в режим вычисления мгновенной скорости о на основании данных о токе якоря и с учетом введенных, об 25 измеренном значении ЭДС вращения
20
0
5
о со ; Следующий импульс U. осущестА
вляет очередную коррекцию вычисляемого значения а мгновенной скорости до. величины измеренного значения ЭДС вращения со и т.д.
Проводимая указанньм способом коррекция вычисляемого значения мгновенной скорости позволяет существенно снизить динамические ошибки блока 13, обусловленные отличием заложенного задания в блоке 13 паспортной механической постоянной Т от ее истинного значения Т.
Учет статического момента сопро
тивления Kg на валу электродвигателя 1 (фиг. Зе),вызывающего изменение ускорения на интервале времени J и Т, и обуславливающего наличие падающего участка скорости со (фиг. Зж)
на интервале времени (1 - Jn) Т, осуществляется при вычислении мгновенного значения о путем вычисления величины Mg неизмеряемого статисти- ческого момента (фиг. Зе).Вычисление
величины М. происходит в блоке вычисления статического момента,построенного на устройстве 30 выборки- хранения аналогового сигнала и втор-ом интеграторе 29 блока 13, На вход
второго интегратора 29 через резис- тор 31. подается измеренное на предыдущем интервале значение ЭДС враще- С5д через резистор 36 подаетнияся
измеренное с помощы устройства
5
30 выборки-хранения (являющегося делью устройства измерения ЭДС врания) значение сОд вычисляемого синала скорости.
Измерение вычисляемого значения мгновенной скорости устройством 30 осуществляется под действием вырабтываемых блоком 8 импульсов и, (фиг. Зв) по времени предшествующих импульсам и (фиг. 36),причем импульсы и,, вырабатываемые блоком 8, подаются с его выхода 18 на вход 24 блока 13, откуда поступают на вход 43 устройства 30 выборки- хранения аналогового сигнала.
«, «.
«л
Разность между значениями СОд и
в начальный момент вычисления пропорциональна статическому моменту сопротивления;она убывает по мере того, как значение вычисленного момента сопротивления К на выходе второго интегратора 29 (и подаваемого на вход первого интегратора 28
через резистор 35) стремится к вели- 25 к третьему выходу блока формирования
чине,пропорциональной истинному значению момента сопротивления М,, при этом вычисляемое значение мгновенной скорости . са стремится к истинному значению мгновенной скорое- , ти о (фиг. Зж).
Таким образом, в установившемся режиме, характеризуемом постоянством статического момеята сопротивления на валу электродвигателя 1, так как Mj, const, блок 13 вычисления мгновенной скорости вращения вала как на интервале времени УиТ : так на интервале времени (1 - Sfn) Тщ формирует на основании данных о мгновенных значениях тока якоря и дискретно измеренных значениях ЭДС вращения на выходе 25 сигнал, пропорциональный мгновенному значению-ско- рости вращения вала электродвигателя 1,сохраняя при этом высокие регулировочные характеристики,
Формула изобретения
1. Электропривод постоянного тока, содержащий электродвигатель постоянного тока, к якорной обмотке которого подключен датчик напрйжения и преобразователь с блоком управления, один вход блока управления соединен с выходом пи-регулятора скорости, первьй вход которого-соединен с выходом блока задания скорости,второй вход блока управления через блок запрета подключен к первому выходу блока формирования временных интервалов, второй выход которого подключен к первому входу блока памяти, второй вход которого подключен к выходу датчика напряжения, выход блока памяти подключен к входу первого блока потенциальной развязки, датчик тока якоря, отличающийся тем,что, с целью повышения быстродействия , в него дополнительно введены второй блок потенци
альнсй развязки, блок вычисления мгновенной скорости вращения вала электродвигателя постоянного тока, первый вход которого подключен к выходу первого блока потенциальной развязки,второй вход подключен через второй блок потенциальной развязки к датчику тока якоря, третий вход - к второму выходу блока формирования временных интервалов,четвертый вход 0
временных интервалов,а вькод блока вычисления мгновенной скорости вращения вала электродвигателя подключен к второму входу пи-регулятора скорости.
2. Электропривод по п. Т, о т- личаю.щийся тем, что в нем блок вычисления мгновенной скорости вращения вала электродвигате5 ля имеет четыре входа и один выход и содержит два интегратора,устройство выборки-хранения аналогового сигнала , шесть резисторов и три уп-. равляемых электронных ключа,причем
0 первый вход блока вычисления мгно- венной скорости вращения вала электродвигателя через первый резистор подключен к входу второго интегратора, а через последовательно соеди5 ненные второй резистор и первый ключ - к входу первого интегратора, подключенному через последовательно соединенные второй ключ и третий резистор к .второму входу блока вычисQ ления мгновенной скорости вращения . вала элек.тродвигателя и через последовательно соединенные третий ключ и четвертый резистор к выходу первого интегратора,точка соединения третьс его резистора и второго ключа через пятый резистор подключена к выходу второго интегратора, вход которого через .шестой резистор подключен к выходу устройства йыборки-хранения
аналогового сигнала, первый выход которого подключен к выходу первого интегратора, а второй вход - к четвертому входу блока вычисления мгновенной скорости вращения вала электродвигателя, третий вход которого
32
J7/ 39,
J4
подключен к управляющим входам первого, второго и третьего электронных ключей, выход блока вычисления мгновенной скорости вращения вала электродвигателя подключен к выходу первого интегратора.
4/ h
сриг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Электропривод постоянного тока | 1983 |
|
SU1121764A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Электропривод постоянного тока | 1981 |
|
SU959248A1 |
| Электропривод постоянного тока | 1985 |
|
SU1277335A1 |
| ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399147C1 |
| Устройство для моделирования вентильного электродвигателя | 1985 |
|
SU1425732A1 |
| Измеритель средних значений электрических параметров вентильного электропривода | 1987 |
|
SU1621127A1 |
| Устройство для защиты от изменения заданной скорости вращения электропривода постоянного тока | 1985 |
|
SU1377957A1 |
Изобретение относится к электро- технике и может быть использовано в электроприводах печатающих устройств, манипуляторах и роботах. Целью изобретения является повьшение быстродействия электропривода при сохранении широкого диапазона регулирования скорости. В устройство введен блок 13 вычисления мгновенной скорости вращения вала электродвигателяs первый вход которого подключен к выходу первого блока 10 потенциальной развязки,а второй вход через второй блок 12 потенциальной развязки к датчику тока 11. Третий и четвертый входы указанного блока подключены соответственно к второму и третьему вькодам блока 8 формирования импульсов, а выход - к второму входу пи-регулятора CKopocTsi 5. В установившемся режиме блок 13 формирует на основании данных о мгновенных значениях тока якоря и дискретно измеренных значениях ЭДС вращения на выходе 25 сигнал,пропорциональный мгновенному значению скорости вращения вала электродвигателя. 1 з,п, ф-лы 5 3 ил. ё гж.1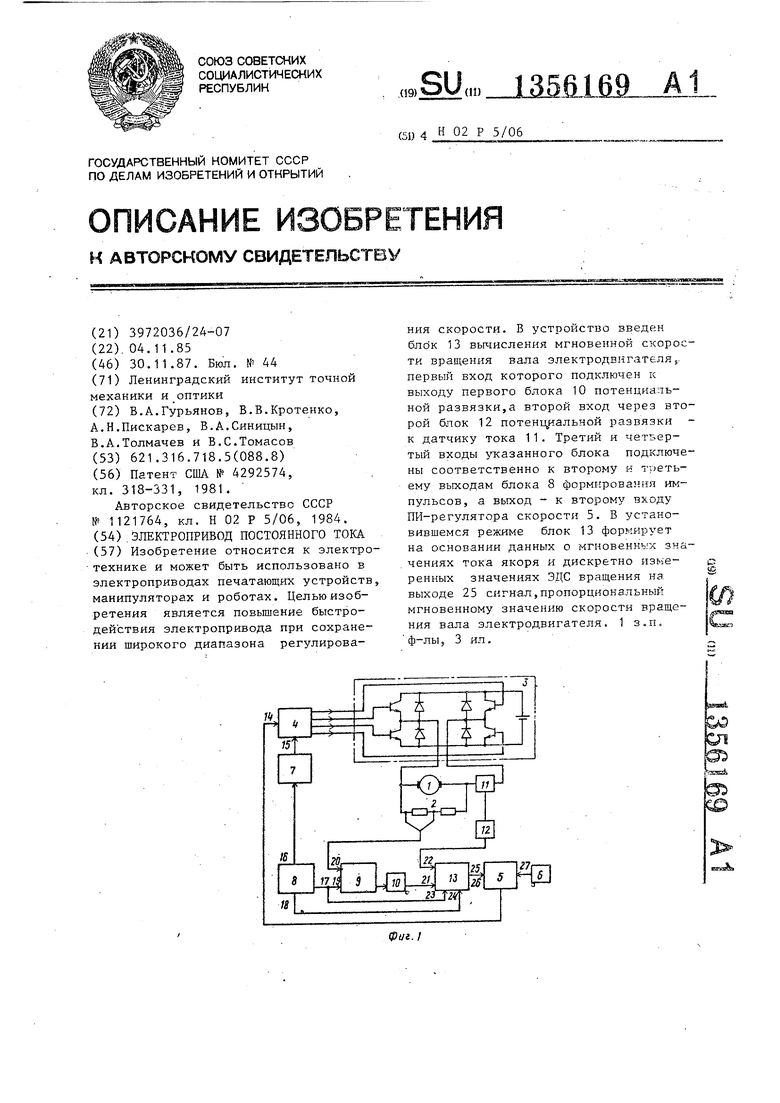
| Патент США № 4292574, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Электропривод постоянного тока | 1983 |
|
SU1121764A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
