1
Изобретение относится к машиностр ению и может быть использовано в качестве элемента приводов строительных, сельскохозяйственных, дорожных и т.п. машин.
Цель изобретения - расширение кинематических возможностей путем увеличения величины радиального смещения обода пжива.
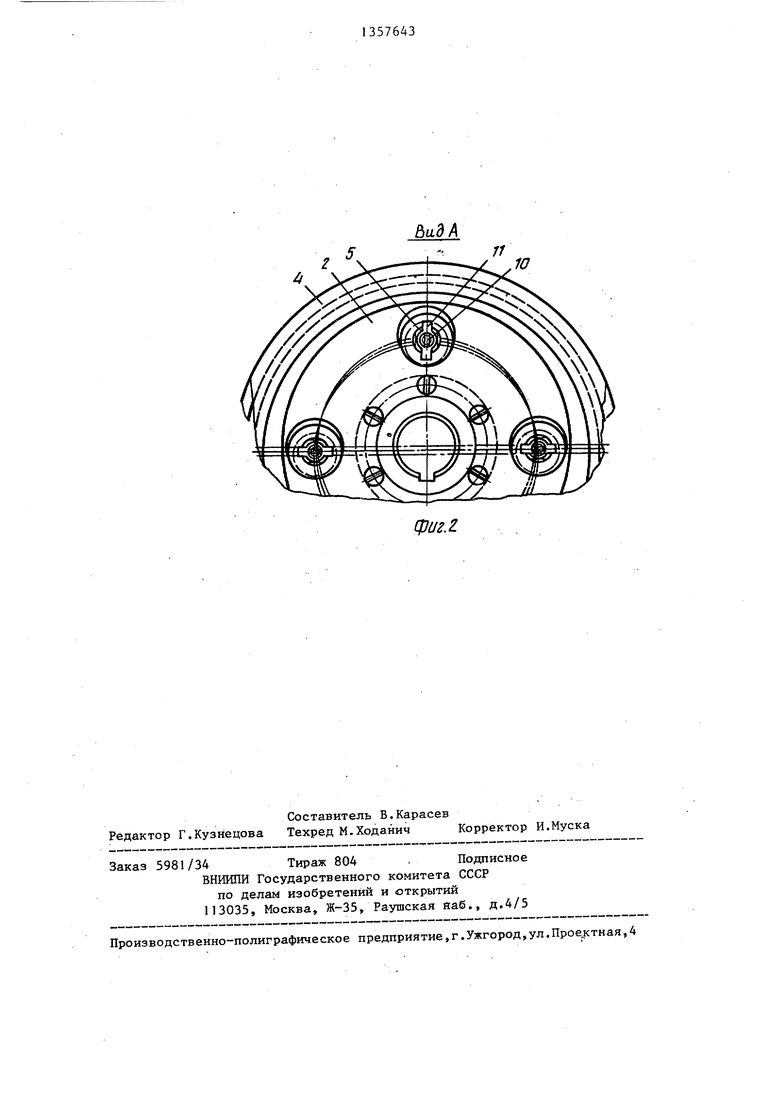
На фиг.1 изображен шкив в осевом сечении; на фиг. 2 - вид А на фиг.. 1.,
Шкив передачи гибкой связью содержит ступицу 1, закрепленные на ней два диска 2 и 3, по окружности каждого из которых расположены конические отверстия, установленный между дисками с возможностью смещения в радиальном направлении обод 4 с вьшол- ненными по его окружности отверстиями, и имеющий на наружной поверхности канавки, например, под клиновой ремень. В отверстиях установлены оси 5 на которых с обоих сторон обода размещены конические пальцы 6 и 7 дл взаимодействия соответственно с отверстиями дисков 2 и 3. Отверстия в ободе 4 со стороны его торцов выполнены коническими, оси 5 установлены в них с возможностью радиального смещения, а пальцы вьтолнены в виде роликов, размещенных.на осях с возможностью осевого смещения и подпружинены к коническим поверхностям отверстий обода посредством упругих элементов 8 и 9. Поджатие упругих элементов осуществляется при помощи винти 10, имеющего участок с правой и левой резьбой, и размещенного внури оси 5, вьтолненной в виде втулки На резьбовых участках винта 10 расположены гайки 11 и 12, которые имеют ступицы, входящие в прорези, выполненные на торцах оси 5.
Р1кив передачи гибкой связью работает следующим образом.
Вращение от ступицы Ь и закрепленых на ней дисков 2 и 3 посредством пальцев б и 7 передается ободу 4.
0
0
Пальцы 6
25
и 7 имеют возможность радиального смещения относительно дисков 2 и 3, а также относительно обода 4, который расположен эксцентрично по отношению к ступице 1 под действием натяжения гибкой связи. При повороте шкива пальцы 6 и 7, обкатьшаются по коническим поверхностям отверстий обода 4 и дисков 2 и 3. Необходимое натяжение гибкой связи осуществляется путем сближения конических пальцев 6 и 7 при вращении винта 10 в каждом пальце. Для обеспечения контроля на- 5 тяжения 5шругие элементы 8 и 9 могут быть предварительно протарированы. Так как конические пальцы контактируют одновременно с коническими отверстиями и дисков 2 и 3, и обода 4, то определенное осевое смещение этих пальцев вызьшает удвоенное радиальное перемещение обода.
Формул.а изо б р. е.тения
Шкив передачи гибкой связью, содержащий ступицу, закрепленные на ней два диска, по окружности каждого из которых выполнены конические отверстия, установленный между дисками с возможностью смещения в радиальном направлении о.бод с выполненными по его окружности отверстиями, установленные в последних оси и размещенные на них с обеих сторон обода конические пальцы для взаимодействия с отверстиями дисков, отличающий- с я тем, что, с целью расширения кинематических возможностей путем личения величины радиального смеще- ния обода, отверстия в ободе со стороны его торцов выполнены коническими, оси установлены в них с возможностью -радиального смещения, а пальцы вьшолнены в виде роликов, размещенных на осях с возможностью осевого смещения, и подпружинены к коническим поверхностям отверстий обода.
.д/(
фиг. 2.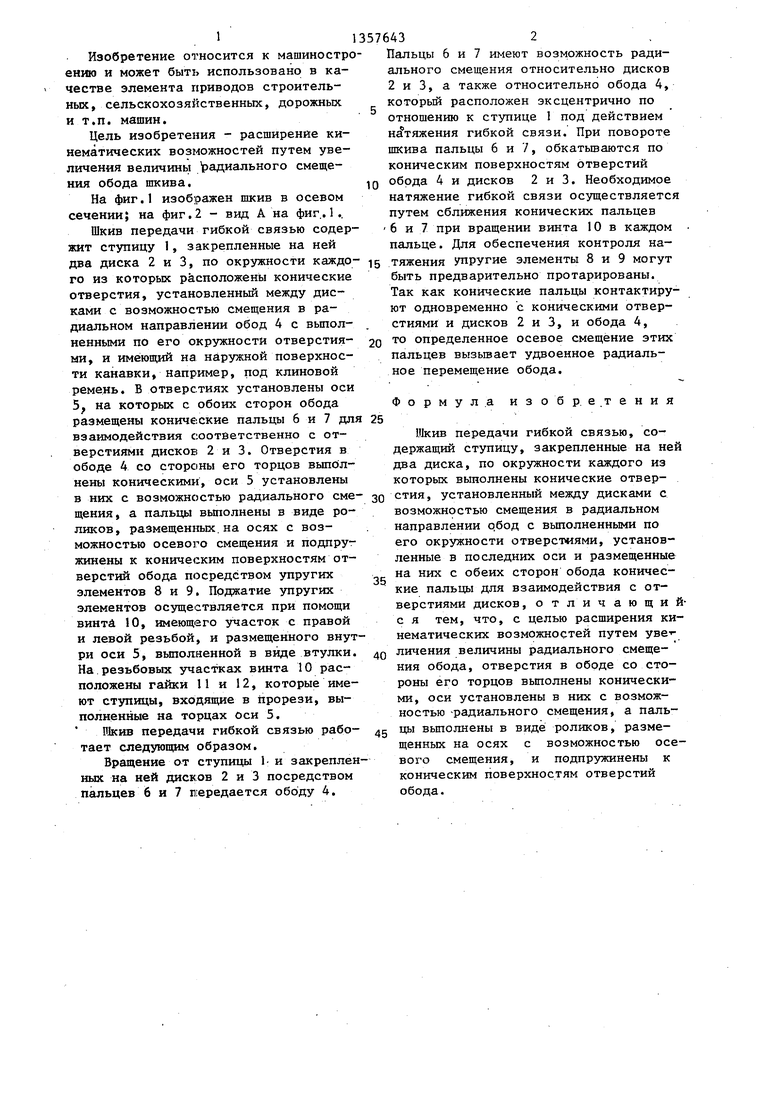
| название | год | авторы | номер документа |
|---|---|---|---|
| Шкив самонатяжной передачи гибкой связью | 1985 |
|
SU1293423A1 |
| Шкив самонатяжной передачи гибкой связью | 1988 |
|
SU1578395A1 |
| Многоручьевый шкив | 1987 |
|
SU1455095A1 |
| УСТАНОВКА ДЛЯ НАМОТКИ ЛЕНТЫ НА ОПРАВКУ | 2008 |
|
RU2399575C2 |
| Регулируемый шкив для клиноременного вариатора | 1980 |
|
SU947548A1 |
| Торцовая фреза | 1989 |
|
SU1726163A1 |
| Механизм привода промышленного робота | 1989 |
|
SU1660959A1 |
| Регулируемая передача | 1983 |
|
SU1132083A1 |
| Привод кругловязальной машины | 1979 |
|
SU821575A1 |
| Клиноременный вариатор | 1989 |
|
SU1742557A1 |
Изобретение относится к машиностроению и может быть применено в качестве элемента приводов строительных, сельскохозяйственных и т.п. машин. Цель изобретения - расширение кинематических возможностей путем увеличения величины радиального сма- щения обвода шкива. Шкив передачи гибкой связью содержит ступицу 1 с закрепленными на ней дисками 3 и размещенным между ними ободом 4, По окружности дисков и обода выполнены отверстия, в которых размещены оси 5 с коническими пальцами 6 и 7, подпружиненными к коническим поверхностлм отверстий. При работе шкива обод 4 располагается эксцентрично по отношению к ступице 1. При повороте шкива пальцы 6 и 7 обкатьшаются по коническим поверхностям отверстий обода и дисков. Натяжение гибкой связи осуществляется путем сближения конических пальцев 6 и 7. 2 ил. «э SKSSS. чаагиА А СО сл 05 4 СО 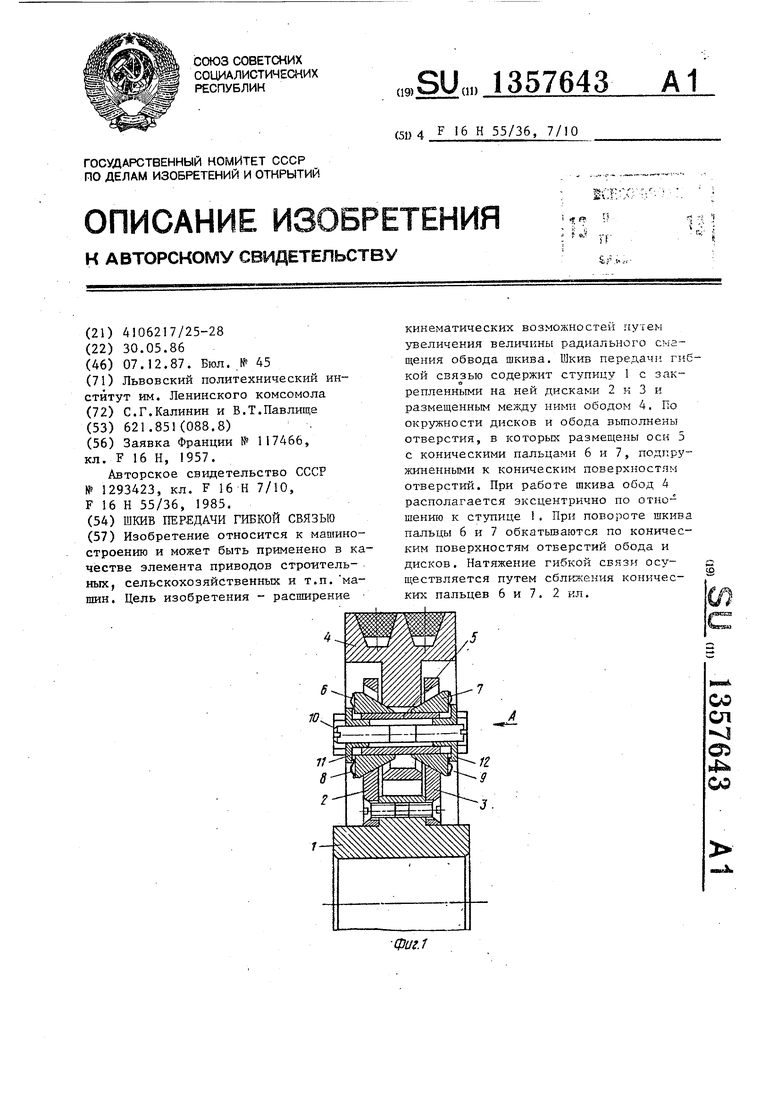
| Гидравлические весы для автоматического взвешивания и регистрации веса, например, лизиметра с монолитом почвы | 1958 |
|
SU117466A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Шкив самонатяжной передачи гибкой связью | 1985 |
|
SU1293423A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
