Изобретение относится к сельскохозяйственной технике, в частности к области автоматизации почвообрабатывающих агрегатов, и может быть использовано в машинно- тракторных агрегатах с оперативно изменяемой шириной захвата для обеспечения оптимальной загрузки двигателя.
Цель изобретения - повышение производительности агрегата.
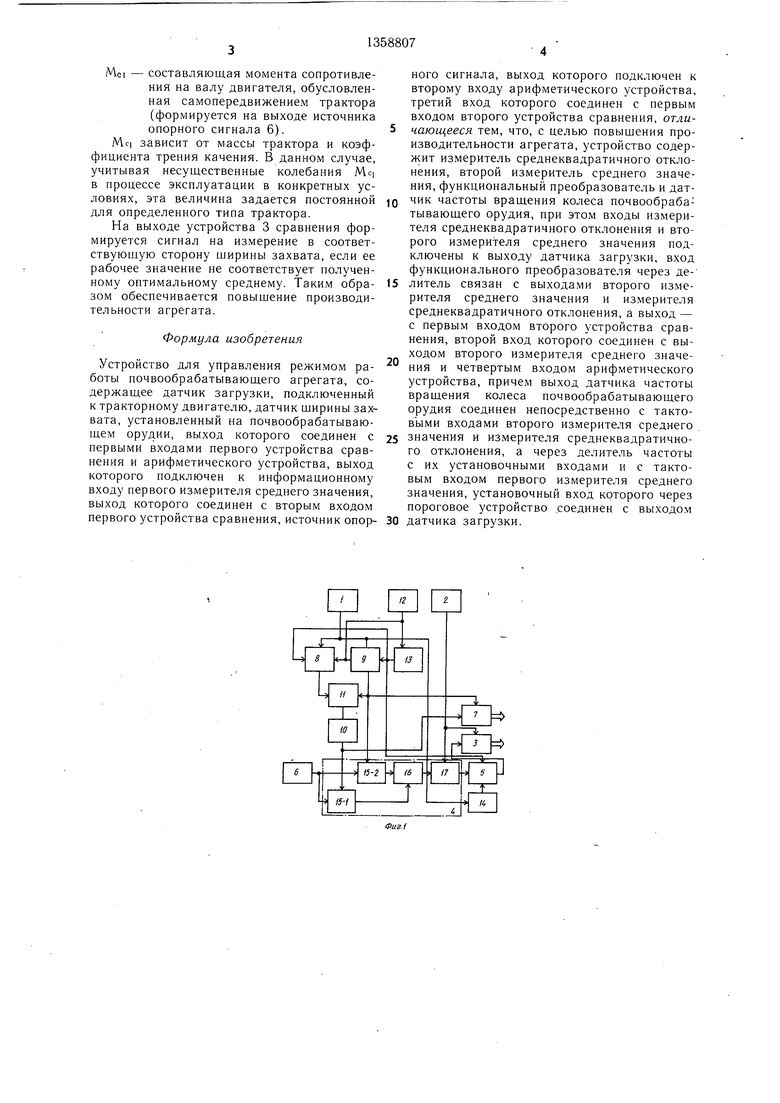
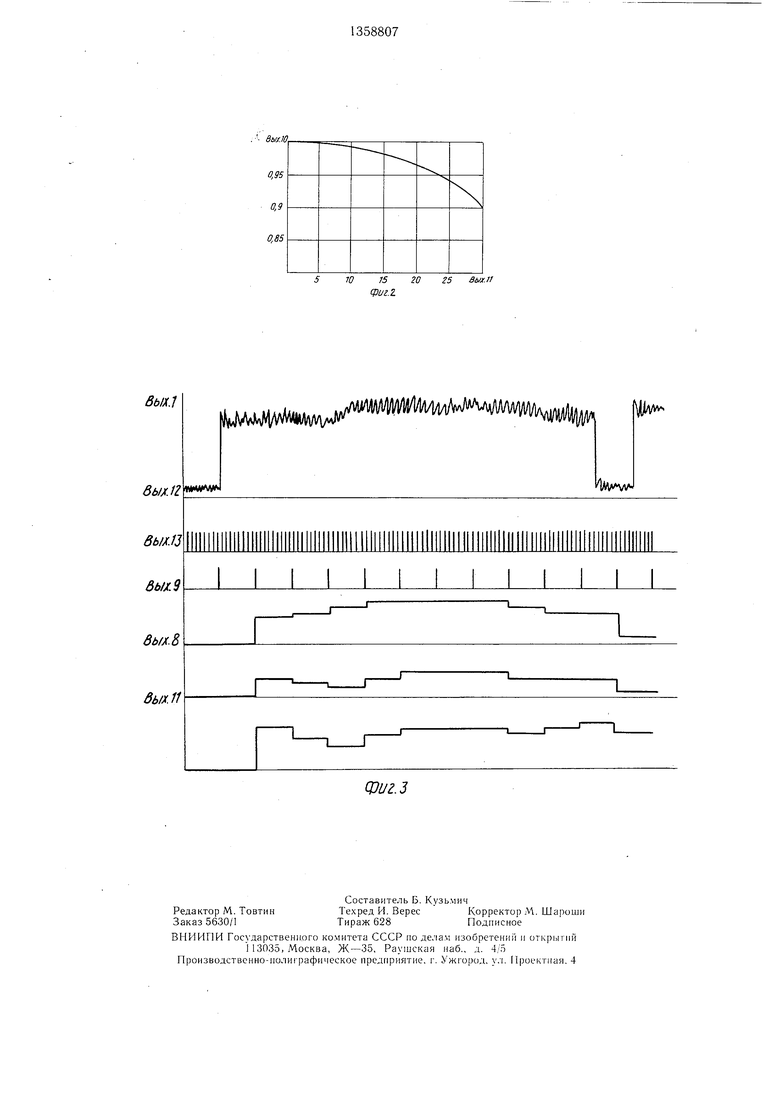
На фиг. 1 приведена структурная функциональная схема устройства для управления -режимом работы почвообрабатывающего агрегата; на фиг. 2 - вид нелинейности функционального преобразователя; на фиг. 3 - временные диаграммы работы устройства.
Устройство для управления режимом работы почвообрабатывающего агрегата содержит подключенный к двигателю трактора датчик 1 загрузки, датчик 2 ширины захвата, первое устройство 3 сравнения, арифметическое устройство 4, первый измеритель 5 среднего значения, источник 6 опорного сигнала, второе устройство, 7 сравнения, измеритель 8 среднеквадратичного отклонения, второй измеритель & среднего значения, функциональный преобразователь 10, делитель 11, датчик 12 частоты вращения вала, делитель 13 частоты, пороговое устройство 14. В состав арифметического устройства 4 входят сумматоры 15-1, 15-2, делитель 16, умножитель 17.
Устройство работает следующим образом.
Сигнал с датчика 1 загрузки двигателя (фиг. 3) подается на информацион- ные входы измерителей среднеквадратичного отклонения 8 и среднего значения 9. В результате на вььходе делителя 11 формируется сигнал пропор циональный отношению среднеквадратичного отклонения к среднему значению а /т„, т.е. коэффициенту вариации v«. Функциональный преобразователь ГО осуществляет нелинейное преобразование этого сигнала в сигнал, пропорциональный оптимальному коэффициенту загрузки двигателя но моменту А.„ог Зависимость, которая заложена в функциональный преобразователь 10 (фиг. 2), рассчитывается заранее для конкретного типа двигателя. Измерители среднеквадратичного от- клрнення 8 и среднего значения 9 так; тируются импульсами с выхода датчика 14 частоты врашения вала колеса почвообрабатывающего орудия, а цикл счета в них задается с частотой сигнала на выходе делителя 13 частоты. Выходные импульсы делителя 13 частоты устанавливают измеритель 8 среднеквадратичного отклонения и измеритель 9 среднего значения в исходное положение. Во время процесса оценки новых значений числовых характеристик т и а„, которое равно периоду импульсов на выходе делителя 13 частоты, на выходе измерителе й.среднеквадратичного отклонения 8 и среднего значения 9 присутст.йуют постоянные сигналы, полученные на основании усреднения информации за предыдущий цикл (фиг. 3). . Переключение передач осуществляется
в зависимости от соотнощения сигналов на выходах функционального преобразователя 10 Ллопт и измерителя 9 среднего значения - т« (т„ - оценка текущего среднего момента сопротивления). При
этом на повыщенную передачу, если
л
., ГПм I д
Лмолт /.Ь
ч е н
на пониженную передачу, если л
1,-
Лл,опт -ТТЛ.2,
пен
не переключается, если
Ал2 -Avonr -
mjj м
l
0
где Мен - .тьный момент двигателя; Д;ллЛ.2- доТлустй мые отклонения от оптимальной величины.
5Оценка соотнощения между Ям опт. и m м производится в устройстве 7 сравнения, выходной сигнал которого управляет переключением передач.
Управление переключением передач позволяет в какой-то мере компенсировать из0 менение загрузки двигателя, обусловленное изменением условий работы на протяжении гона. Для того, чтобы компенсировать изменение средних условий при переходе от гона к гону организуется управление щириной захвата агрегата. При этом ширина захва5 та изменяется при разворотах от гона к гону, а при рабочем проходе организуется измерение средней оптимальной для гона щирины (выход измерителя 5 среднего значения). Тактируется измеритель 5 среднего значения выходным сигналом делителя 13 частоты, который, как указывалось , задает цикл измерения текущего среднего момента сопротивления ты. В то же время установка измерителя 5 среднего значения оптимальной ширины захвата в исходное
5 состояние осуществляется выходным импульсом порогового устройства 14, который появляется при резком увеличении момента сопротивления, чем сопровождается заглубление плуга. Текущее значение оптимальной ширины захвата Ьопт i на гоне вычисляет0 ся арифметическим устройством 4 и соответствует выражению
ЬолП - Ьр
()L Меи-Мсу nXmlAlt,
где Ьр - рабочая ширина захвата, которой соответствует выходной сигнал датчика 2 ширины захвата;
MCI - составляющая момента сопротивления на валу двигателя, обусловленная самопередвижением трактора (формируется на выходе источника опорного сигнала 6).
Мс| зависит от массы трактора и коэффициента трения качения. В данном случае, учитывая несущественные колебания Mci в процессе эксплуатации в конкретных условиях, эта величина задается постоянной для определенного типа трактора.
На выходе устройства 3 сравнения формируется сигнал на измерение в соответствующую сторону ширины захвата, если ее рабочее значение не соответствует полученному оптимальному среднему. Таким обра- зом обеспечивается повышение производительности агрегата.
Формула изобретения
Устройство для управления режи.мом ра- боты почвообрабатывающего агрегата, содержащее датчик загрузки, подключенный к тракторному двигателю, датчик ширины захвата, установленный на почвообрабатывающем орудии, выход которого соединен с первыми входами первого устройства сравнения и арифметического устройства, выход которого подключен к информационному входу первого измерителя среднего значения, выход которого соединен с вторым входом первого устройства сравнения, источник опор-
ного сигнала, выход которого подключен к второму входу арифметического устройства, третий вход которого соединен с первым входом второго устройства сравнения, отличающееся тем, что, с целью повышения производительности агрегата, устройство содержит измеритель среднеквадратичного отклонения, второй измеритель среднего значения, функциональный преобразователь и датчик частоты вращения колеса почвообрабатывающего орудия, при этом входы измерителя среднеквадратичного отклонения и второго измерителя среднего значения подключены к выходу датчика загрузки, вход функционального преобразователя через делитель связан с выходами второго измерителя среднего значения и измерителя среднеквадратичного отклонения, а выход - с первым входом второго устройства сравнения, второй вход которого соединен с выходом второго измерителя среднего значения и четвертым входом арифметического устройства, причем выход датчика частоты вращения колеса почвообрабатывающего орудия соединен непосредственно с тактовыми входами второго измерителя среднего значения и измерителя среднеквадратичного отклонения, а через делитель частоты с их установочными входами и с тактовым входом первого измерителя среднего значения, установочный вход которого через пороговое устройство .соединен с выходом датчика загрузки.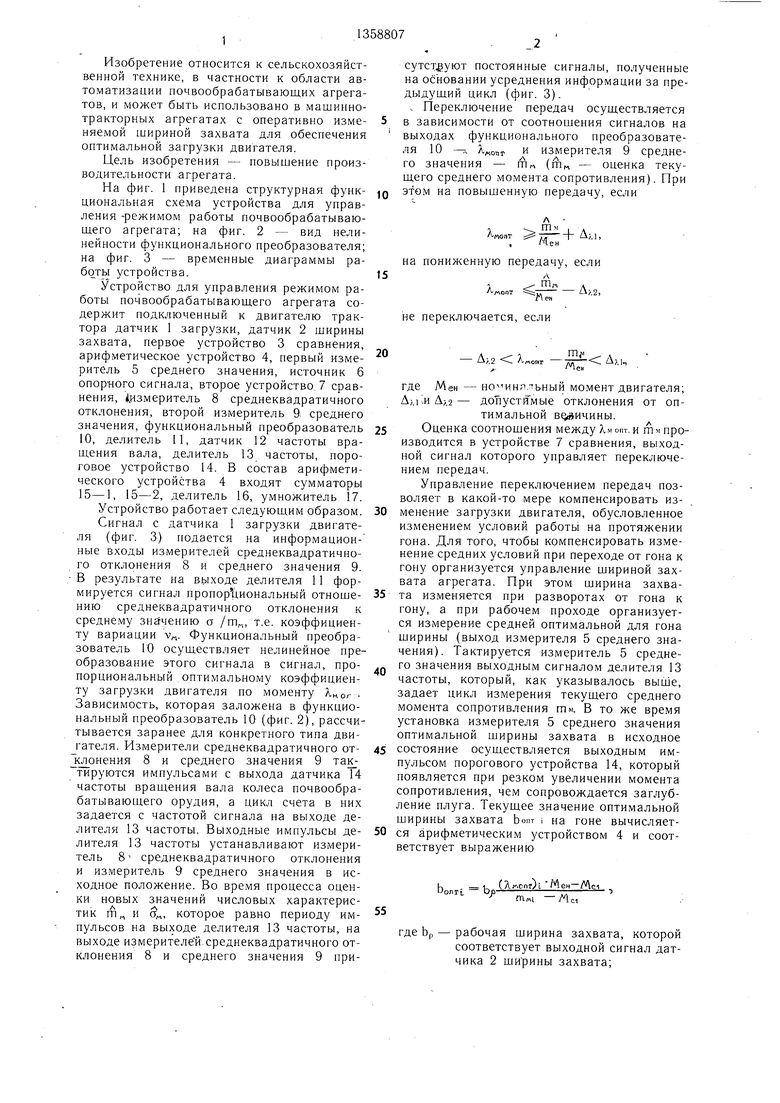
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1987 |
|
SU1493129A2 |
| Система автоматического управления режимом работы почвообрабатывающего агрегата | 1984 |
|
SU1259969A1 |
| Система автоматического регулирования загрузки тракторного двигателя | 1983 |
|
SU1218949A1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2005 |
|
RU2295216C1 |
| Анализатор изменения производительности почвообрабатывающего агрегата | 1989 |
|
SU1672948A1 |
| Почвообрабатывающее орудие | 1983 |
|
SU1134124A2 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1997 |
|
RU2143187C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2015 |
|
RU2578444C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ПОЧВЫ | 2013 |
|
RU2535102C1 |
| Способ определения оптимальной рабочей передачи машинно-тракторного агрегата и система для его осуществления | 1989 |
|
SU1701133A1 |
Изобретение относится к сельскохозяйственной технике, в частности к области автоматизации почвообрабатывающих ai-регатов, и может быть использовано в машинно-тракторных агрегатах с оперативно изменяемой шириной захвата для обеспечения оптимальной загрузки двигателя. Цель изобретения - повышение производительности агрегата. Достижение цели обеспечивается введением измерителя 8 среднеквадратичного отклонения, EJTOporo измерителя 9 среднего значения, делителя 11, функционального преобразователя 10,датчика 12 частоты вращения вала колеса почвообрабатывающего орудия, делителя 13 частоты. Введение этих устройств позволяет организовать непосредственно в процессе эксплуатации оценку оптимального значения коэффициента загрузки двигателя по моменту, после чего стало возможным управлять режимом работы агрегата за счет регулирования передаточного отноп1ения транс- мисеии и ширины захвата по отклонению коэффициента загрузки двигателя oi. опти-, мального значения. 3 ii.:i. S (Л со ел оо 00 о 
0,35 0,9 0,85
570 75 20 г5 вых. И
fpui.i
Вых.1
6ы/.}2
|МА
вьШЗ 6ых.9
вь/х.& вых.11
| Система автоматического регулирования загрузки тракторного двигателя | 1983 |
|
SU1218949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
