орудия связан с вторым входом умножителя и первым входом устройства сравнения, первый выход источника опорно- го напряжения связан с вторым входом сумматора, второй его выход - с вторым входом делителя, выход устройства оценки посредством регистра памяти соединен с вторым входом устройства сравнения, выход первого элеменI
Изобретение относится к сельсксГ хозяйственному машиностроению, в частности к автоматизации почвообра- батывакяцих агрегатов.
Цель изобретения - повышение производительности агрегата и расширение его функциональных возможностей,
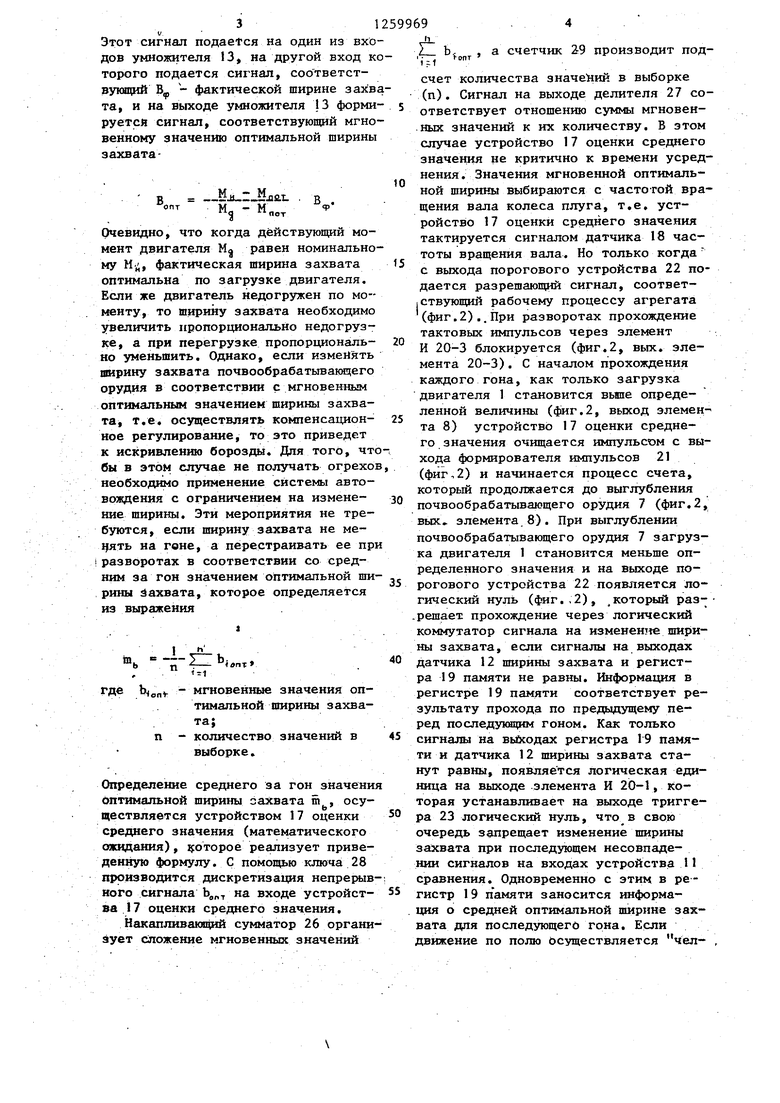
На фиг, 1 приведена структурная функциональная схема системы управления режимом работы почвообрабатывающего агрегата; на фиг. 2 - временные диаграммы работы систеьш.
Система автоматического управления режимом работы почвообрабатывающего агрегата содержит подключенный к двигателю 1 трактора 2 датчик 3 загрузки, выход которого через пороговое устройство 4 и электромеханический исполнительный механизм 5 соединен с трансмиссией 6 трактора 2, связанного с почвообрабатывающим орудием 7, реверсивный электрогидравли- зеский исполнительный механизм 8, электронный усилитель 9, логический коммутатор 10, устройство 11 сравнения, установленный на почвообрабатывающем орудии 7 датчик 12 ширины захвата, умножитель 13, делитель 14, источник 15 опорного напряжения, сумматор 16, устройство 17 оценки среднего значения, датчик 18 частоты вращения вала колеса почвообрабатывающего орудия 7, регистр 19 памяти, эле- |меиты И 20-1, 20-2, 20-3, формирователь 21 импульсов, дополнительное пороговое устройство 22, триггер 23, i инвертор 24. В цепь между выходом триггера 23 и элементом И 20-2 включен переключатель 25. Устройство
.та И - с информационным входом регистра памяти, а его второй вход - с третьим входом логического коммутатора, выходы которого через электронный усилитель и электрогидравлический исполнительный механизм соединены с почвообрабатьшающим орудием, соответственно выход ключа устройства оценки среднего значения соединен с входом его делителя через сумматор.
оценки среднего значения содержит накапливающий сумматор 26, делитель 27, ключ 28, счетчик 29.
Система работает следующим образом.
Выходной сигнал датчика 3 загрузки двигателя 1 по моменту Мо (М&- действующий момент двигателя) подается на входы двух независимых каналов
управления с помощью порогового устройства 4, задающего соответствующие уставки, а с помощью электромеханического исполнительного механизма 5 осуществляется переход на повьшгенную
или на пониженную передачу.
Во втором канале управления сигнал с выхода датчика 3 загрузки двигателя 1 подается на один из входов сумматора 16, на другой вход которого подается с выхода источника 15 опорного напряжения постоянньй сигнал, соответствующий моменту потерь М„д на самопередвижение трактора 2, преодоление подъемов, протаскивание почвообрабатывающего орудия в открытой бороздке. Сигнал на выходе сумматора 16 соответствует разности мо- ментов: Мд - . С второго выхода источника 15 опорного напряжения подается напряжение, соответствующее разности моментов. М„ - М„„т (М„ - номинальный момент двигателя). На выходе делителя 14, таким образом,фор- мируется сигнал, соответствующий выражению
м„ - м„„
31259969
V,
тот сигнал подается на один из вхоов y ffloжитeля 13, на другой вход коорого подается сигнал, соо тветст- ующий В - фактической ширине захваа, и на выходе умножителя 13 формиуется сигнал, соответствующий мгноенному значению оптимальной ширины ахвйта1счот .ны сл зн не но ще ро та то с да |Ст та И ме ка дв ле та го хо ко по вы по ка ре ро ги .ре ко ны да ра ре зу ре си ти ну ни то ра оч зах ни ср ги ци ва дви
. - В -Мл-Г-Млйт. . в
М - М„„ фОчевидно, что когда действующий момент двигателя М равен номинальному M., фактическая ширина захвата оптимальна по загрузке двигателя. Если же двигатель недогружен по моменту, то ширину захвата необходимо увеличить пропорционально недогрузке, а при перегрузке пропорционально уменьшить. Однако, если изменять ширину захвата почвообрабатывающего орудия в соответствии с мгновенш м оптимальным значением ширины захвата, т.е. осуществлять компенсационное регулирование, то это приведет к искривлению борозды. Для того, что бы в этом случае не получать огрехов необходимо применение системы автовождения с ограничением на изменение ширины. Эти мероприятия не требуются, если ширину захвата не ме- на гене, а перестраивать ее при I разворотах в соответствии со средним за гон значением оптимальной ширины захвата, которое определяется из выражения
1
b
впт
bi
onV
П
-мгновенные значения оптимальной ширины захвата;
-количество значений в выборке.
Определеиие среднего за гон значения оптимальной ширины захвата m , осуществляется устройством 17 оценки среднего значения (математического ожидания), ifOTopoe реализует приведенную формулу. С помощью ключа 28 производится дискретизация непрерывкого сигнала Ь,„ на входе устройст- ва i 7 оценки среднего значения.
Накапливаю ций сумматор 26 организует сложение мгновенных значений
t
11
f опт
а счетчик 29 производит под
10
15
20
25
30
5
0
5
0 5
счет количества значений в выборке (п). Сигнал на выходе делителя 27 соответствует отношению суммы мгновен- .ных значений к их количеству. В этом случае устройство 17 оценки среднего значения не критично к времени усреднения. Значения мгновенной оптимальной ширины выбираются с частотой вращения вала колеса плуга, т.е. устройство 17 оценки среднего значения тактируется сигналом датчика 18 частоты вращения вала. Но только когда с выхода порогового устройства 22 подается разрешающий сигнал, соответ- |Ствующий рабочему процессу агрегата (фиг.2).. При разворотах прохождение тактовых импульсов через элемент И 20-3 блокируется (фиг.2, вых. элемента 20-3). С началом прохождения каждого гона, как только загрузка двигателя 1 становится вьше определенной величины (фиг.2, выход элемента 8) устройство 17 оценки среднего значения очищается импульсом с выхода формирователя импульсов 21 (фиг,2) и начинается процесс счета, который продолжается до выглубления почвообрабатывающего орудия 7 (фиг.2, вых.. элемента 8). При выглублении почвообрабатывающего орудия 7 загрузка двигателя 1 становится меньше определенного значения и на выходе порогового устройства 22 появляется логический нуль (фиг..2), который раз- .решает прохождение через логический коммутатор сигнала на изменеитге ширины захвата, если сигналы на выходах датчика 12 ширины захвата и регистра 19 памяти не равны. Информация в регистре 19 памяти соответствует результату прохода по предыдущему перед последукнцим гоном. Как только сигналы на вьбсодах регистра 19 памяти и датчика 12 ширины захвата станут равны, появляется логическая единица на выходе .элемента И 20-1, которая устанавливает на выходе триггера 23 логический нуль, что в свою очередь запрещает изменение ширины захвата при последующем несовпадении сигналов на входах устройства 11 сравнения. Одновременно с этим в регистр 19 п амяти заносится информация о средней оптимальной ширине захвата для последующего гона. Если движение по полю Осуществляется чел- ,
S . 1259969
ночным способом, то для перестрой- .разомкнуть переключатель 25 и тогда ки ширины захвата по результатам про- блокировки на изменение ширины зах- хода по последующему гону необходимо .вата при развороте не будет.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1985 |
|
SU1358807A1 |
| Устройство для управления режимом работы почвообрабатывающего агрегата | 1987 |
|
SU1493129A2 |
| Система автоматического регулирования загрузки тракторного двигателя | 1983 |
|
SU1218949A1 |
| Анализатор изменения производительности почвообрабатывающего агрегата | 1989 |
|
SU1672948A1 |
| Почвообрабатывающее орудие | 1983 |
|
SU1134124A2 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УБОРКИ ЗЕРНА КОМБАЙНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2394417C1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Способ управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1696826A1 |
| Устройство для сортировки деталей и узлов на группы | 1980 |
|
SU906635A2 |
Bb.3f,eH.Js П П П П П П П П П П П П П П
.....Xl
Редактор Н.Швыдкая
Составитель С.Заруцкий Техред И.Попович
Заказ 5152/1
Тираж 679Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Е.Рошко
| Система автоматического регулирования загрузки тракторного двигателя | 1983 |
|
SU1218949A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
