Изобретение относится к машиностроению, в частности к пневматическим исполнительным механизмам с узлами управления, и может быть использовано в качестве силового позиционного привода.
Целью изобретения является улучшение динамических характеристик пневмопривода.
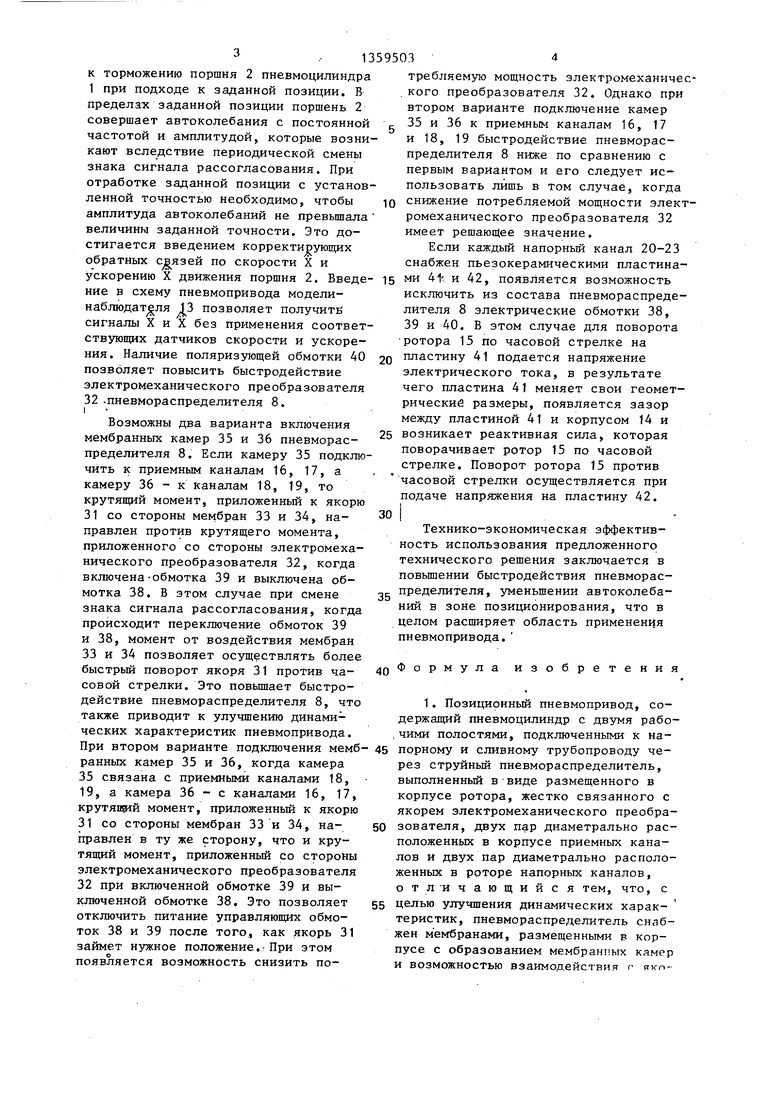
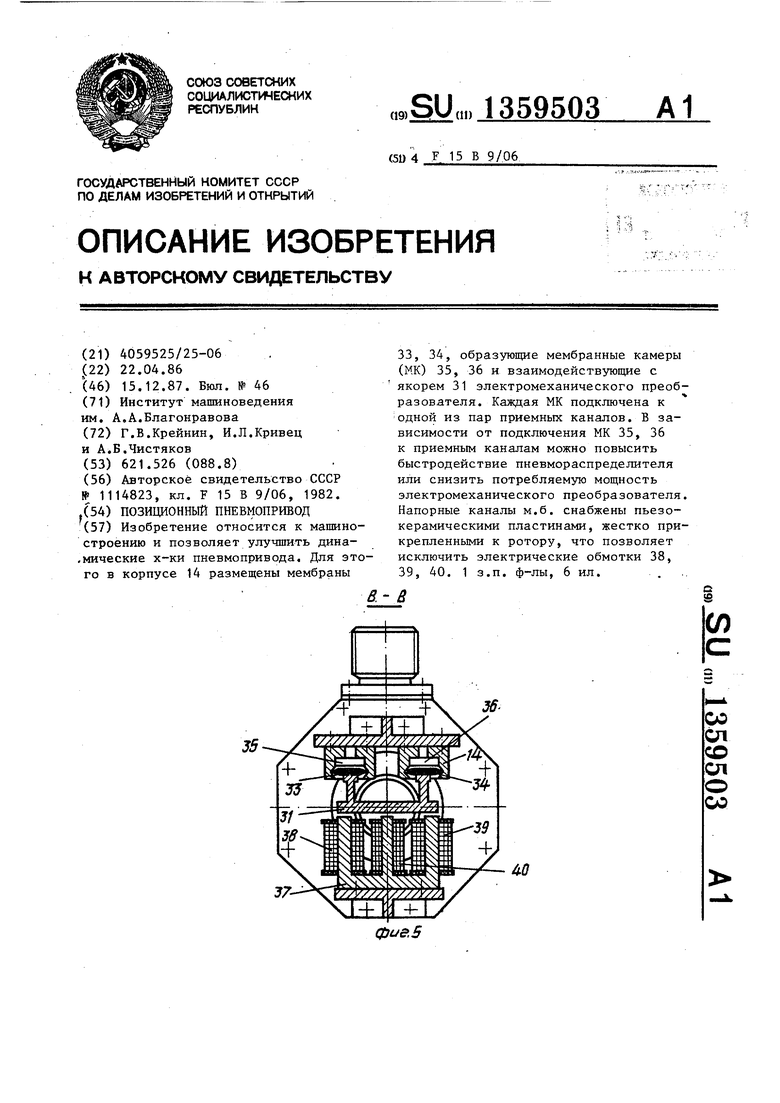
На фиг. 1 представлена принципиальная схема пневмопривода; на фиг. 2 - струйный пневмораспредели- тель, поперечное сечение; на фиг.З - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2; на фиг. 5 - сечение В-В на фиг. 4; на фиг. 6 - пример .выполнения- сопл..
Позиционный пневмопривод .(фиг.1) содержит пневмоцилиндр 1 с установленными в нем поршнем 2 и штоком 3 с образованием двух рабочих полостей 4 и 3, подключенных к напорному и сливному трубопроводам 6 и 7 через струйный пневмораспределитель 8. Со штоком 3 жестко связана зубчатая рейка 9, взаимодействзпощая с датчиком 10 положения посредством зубчатого колеса 11. Сигнал X от датчика 10 поступает на входы системы 12 управления и модели-наблюдателя 13 Люенбергера. На входы системы 12 правления поступают также сигналы х и X, которые пропорциональны ско- рости и ускорению движения штока 3 пневмоцилиндра 1.
Струйный пневмораспределитель 8 (фиг.2) выполнен в виде размещенного в корпусе 14 ротора 15, двух пар диаметрально расположенных в корпусе 14 приемных каналов 16, 17 и 18, 19 и двух пар диаметрально расположенных в роторе 15 напорных каналов 20, 21 и 22, 23, в которых установлены сопловые вкладьши 24, выполненные из антифрикционного материала, и компенсаторные прокладки 25, предназначенные для обеспечения равномерного прижатия вкладьш ей 24 к внутренней
поверхности корпуса 14.
i
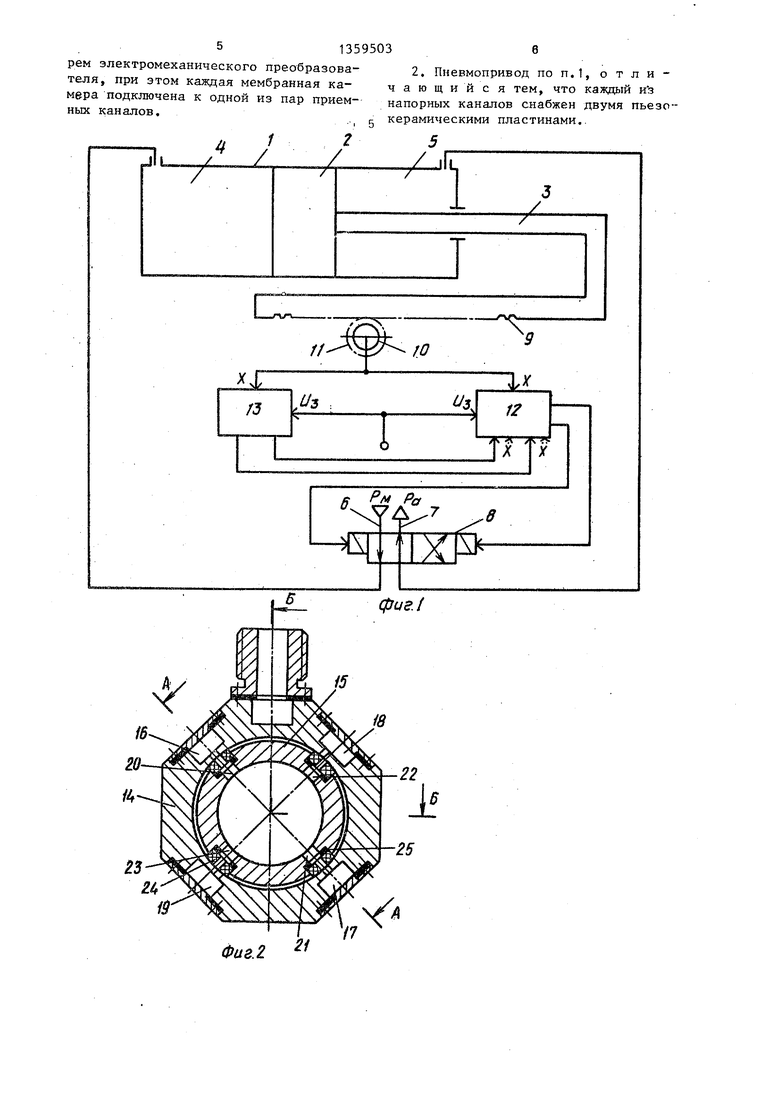
Канал 16 соединен с каналом 17, а канал 18 - с каналом 19 соответст- : венно с помощью кольцевых расточек а, b (фиг.З). Ротор 15 имеет две. внутренние камеры 26 и 27, первая из которых соединена с атмосферой, а вторая - с источником сжатого воздуха (не показан). Подвод сжатого воздуха осуществляется через штуцер 28.
Штуцеры 29 и 30 (фиг.4) соединяют пневмораспределитель 8 с рабочими полостями 4 и 5. Якорь 31 электроме- ханического преобразователя 32 жестко,, связан с ротором 15.
Пневмораспределитель 8 снабжен мембранами 33 и 34 (фиг.5), размещенными в корпусе 14 с образованием
мембранных камер 35 и 36 и возможностью взаимодействия с якорем 31 электромеханического преобразователя 32, при этом каждая из мембранных камер 35 и 36 подключена к одной из
пар приемных каналов 16, 17 или 18, 19. На магнитопроводе 37 электромеханического преобразователя 32 размещены три электрические обмотки 38, 39 и 40. Обмотки 38, 39 являются уЦравляющими, а обмотка 40 - поляризующей Каждый из напорных каналов 20-23 может быть снабжен двумя пьезокера- мическими пластинами 41 и 42, которые жестко прикреплены к ротору 15.
Позиционный пневмопривод работает следующим образом.
При поступлении на вход системы
12управления и модели-наблюдателя
13задающего сигнала U возникает
сигнал рассогласования, который пропорционален разности между координатой заданной позиции и суммой, состоящей из текущей доординаты поршня 2 X, его скорости X и ускорения
х . Например, при положительном рассогласовании поршень 2 со штоком 3 должен совершить движение слева направо (по фиг.1). При этом запиты- вается обмотка 39 электромеханического преобразователя 32, якорь 31 поворачивается по часовой стрелке, в результате.чего ротор 15 занимает такое положение, при котором напор- ные каналы 20, 21 сообщаются с приемными каналами 16, 17 и соответственно с камерой 27, а приемные каналы 18, 19 - с камерой 26. При этом сжатый воздух поступает в рабочую полость 4, а рабочая полость 5 сообщается с атмосферой. Под действием перепада давления в рабочих полостях 4 и 5 поршень 2 со штоком 3 движется слева направо (по фиг.1). При смене знака сигнала рассогласования запитывается обмотка 38, якорь 31 поворачивается против часовой стрелки. В результате приемные каналы ,18, 19 соединяк5тся с камерой 27, а каналы 16, 17 - с камерой 26. Это приводит
к торможению поршня 2 пневмоцилиндра 1 при подходе к заданной позиции. В пределах заданной позиции поршень 2 совершает автоколебания с постоянной частотой и амплитудой, которые возникают вследствие периодической смены знака сигнала рассогласования. При отработке заданной позиции с установленной точностью необходимо, чтобы амплитуда автоколебаний не превьшала величины заданной точности. Это достигается введением корректирующих обратных сдязей по скорости X и ускорению X движения поршня 2. Введение в схему пневмопривода модели- наблюдателя 13 позволяет получить сигналы X и X без применения соответствующих датчиков скорости и ускорения. Наличие поляризующей обмотки 40 позволяет повысить быстродействие электромеханического преобразователя
32-пневмораспределителя 8.
I
Возможны два варианта включения мембранных камер 35 и 36 пневмораспределителя 8. Если камеру 35 подключить к приемным каналам 16, 17, а камеру 36 - к каналам 18, 19, то крутящий момент, приложенный к якорю 31 со стороны мембран 33 и 34, направлен против крутящего момента, приложенного со стороны электромеханического преобразователя 32, когда включена-обмотка 39 и выключена обмотка 38. В этом случае при смене знака сигнала рассогласования, когда происходит переключение обмоток 39 и 38, момент от воздействия мембран 33 и 34 позволяет осуществлять более быстрый поворот якоря 31 против часовой стрелки. Это повышает быстродействие пневмораспределителя 8, что также приводит к улучшению динамических характеристик пневмопривода.
При втором варианте подключения мемб- 45 порному и сливному трубопроводу черанных камер 35 и 36, когда камера 35 связана с приемными каналами 18, 19, а камера 36 - с каналами 16, 17, крутящий момент, приложенный к якорю
31со стороны мембран 33 и 34, направлен в ту же сторону, что и крутящий момент, приложенный со стороны электромеханического преобразователя
32при включенной обмотке 39 и выключенной обмотке 38. Это позволяет отключить питание управляющих обмоток 38 и 39 после того, как якорь 31 займет нужное положение.; При этом появляется возможность снизить потребляемую мощность электромеханичес- . кого преобразователя 32. Однако при втором варианте подключение камер
f. 35 и 36 к приемным каналам 16, 17 и 18, 19 быстродействие пневмораспределителя 8 ниже по сравнению с первым вариантом и его следует использовать лишь в том случае, когда
0 снижение потребляемой мощности электромеханического преобразователя 32 имеет решаюп ее значение.
Если каждый напорный канал 20-23 снабжен пьезокерамическими пластина5 ми 41 и 42, появляется возможность исключить из состава пневмораспределителя 8 электрические обмотки 38, 39 и 40. В этом случае для поворота ротора 15 по часовой стрелке на пластину 41 подается напряжение электрического тока, в результате чего пластина 41 меняет свои геометрические размеры, появляется зазор между пластиной 41 и корпусом 14 и возникает реактивная сила, которая поворачивает ротор 15 по часовой стрелке. Поворот ротора 15 против часовой стрелки осуществляется при подаче напряжения на пластину 42.
0
5
Технико-экономическая эффективность использования предложенного технического решения заключается в повьш1ении быстродействия пневморас- цределителя, згменьшении автоколебаний в зоне позиционирования, что в целом расширяет область применения пневмопривода.
ормула изобретения
1. Позиционный пневмопривод, содержащий пневмоцилиндр с двумя рабо- чими полостями, подключенными к нарез струйный пневмораспределитель, выполненный в-виде размещенного в корпусе ротора, жестко связанного с якорем электромеханического преобразователя, двух пар диаметрально расположенных в корпусе приемных каналов и двух пар диаметрально расположенных в роторе напорных каналов, отл И чающийся тем, что, с
целью улучшения динамических характеристик, пневмораспределитель снабжен мембранами, размещенными в корпусе с образованием мембранных камер и возможностью взаимодействия г яко513595036
рем электромеханического преобразова- 2. Пневмопривод по п.1, о т л и - теля, при этом калодая мембранная ка- чающийся тем, что каждый и з мера подключена к одной из пар прием- напорных каналов снабжен двумя пьезо- каналов,,5 керамическими пластинами..
л / г 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический позиционный привод | 1985 |
|
SU1359502A1 |
| СПОСОБ УПРАВЛЕНИЯ РУЛЕВЫМ ПНЕВМОПРИВОДОМ УПРАВЛЯЕМОЙ РАКЕТЫ И РУЛЕВОЙ ПНЕВМОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254501C2 |
| Пневматический привод с цилиндром одностороннего действия | 2019 |
|
RU2714987C1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| Устройство для регулирования давления газа | 1983 |
|
SU1188710A1 |
| Устройство для приготовления и подачи под давлением жидкости на распыление | 1978 |
|
SU1090457A1 |
| Распределительное устройство | 1975 |
|
SU602698A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Пневматический привод | 1982 |
|
SU1114823A1 |
23
24
/
Фиг.2
фиг.
. Rштт тсшт
rS
Редактор И.Рыбченко
(pus.6
Составитель В,Коваль Техред И.Попович
Заказ 6133/36 Тираж 640 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,. Раушская наб., .д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Шароши
| Пневматический привод | 1982 |
|
SU1114823A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
