1
Изобретение относится к пневмогид- роавтоматике и может быть использовано в системе управления исполнительными органами промышленных роботов и манипуляторов.
Цель изобретения - повышение быстродействия и точности.
На Аиг. 1 изображена схема пневмо- гидравлического следящего привода; на фиг. 2 - разрез А-А на фиг. 1.
Привод содержит пневмодвигатель в виде пневмоцилиндра 1 и гидродвигатель в виде гидроцилиндра 2, связанные подвижными элементами, например штоками 3,4, пневмораспределители 5 и 6, подключенные к пневмоцилиндру 1 пневмолиниями 7,8, и связанный гидролиниями 9,10 с гидроцилиндром 2 пневмогидравлический преобразователь, включающий поворотную втулку 11, ки- нематически связанную элементом 12 обратной связи со штоками 3, 4, и поворотный золотник 13, соединенный с задатчиком 14 и размещенный в глухой расточке 15 втулки 11, на внутреннем торце 16 которой выполнены пневматические сопла 17, 18 элемента сопло - заслонка, обращенные к торцу 19 золотника 13 и подключенные пневмолиниями 20, 21 к камерам 22, 23 пневмораспределителей 5, 6, Заслонка элемента сопло - заслонка выполнена в виде профилированных рычагов 24 и 25, закрепленных с возможностью поворота на торце 16, а золотник 13 снаб-
0 0 5
5
жен эксцентрично закрепленной на торце 19 осью 26, свободный конец которой размещен в зазоре (не обозначен) между рычагами 24 и 25, поджатыми к нему дополнительно установленным упругим элементом 27. Пневмо- линия 28 соединена с атмосферой. Втулка 11 и золотник 13 размещены в корпусе 29. Во втулке 11 выполнены отверстия 30 и 31, золотник 13 имеет цилиндрический вкладыш 32, На гидролинии 10 размег;ен регулируемый дроссель 33. К гидроцилиндру 2 через обратные клапаны 34, 35 подключен компенсатор 36 утечек. Гидроцилиндр 2 имеет полости 37 и 38, пневмоцилиндр 1 - полости 39 и 40. Золотник 13 имеет вал 41. Распределители 5, 6 подключены к напорной пневмолинии 42.
Пневмогидравлический следящий привод работает следующим образом.
В исходном положении полости 39, 40 соединены с пневмолинией 42.
При поступлении задающего сигнала вал 41 поворачивается, например, по часовой стрелке. При этом ось 26 поворачивает рычаг 25 и открывает сопло 18, соединяя с атмосферой камеру 22 пневмораспределителя 5, который переключается и соединяет с атмосферой полость 39 пневмоцилиндра 1. В то же время цилиндрический вкладыш 32, смещаясь относительно поворотной втулки 11, открывает отверстия 30 и
31 соединенные гидролиниями 9 и 10 с полостями 3/, 38 гидроцилиндра 2. Ытоки 3, 4 пневмоцилиндра 1 и гидроцилиндра 2 движутся влево. Перемещение штоков 3, 4 передается через элемент 12 обратной связи на поворотную втулку 11.
При неподвижном вале 41 поворотная втулка 11 поворачивается до тех пор, пока цилиндрический вкладыш 32 не перекроет отверстия 30 и 31. В этот момент шток 4 останавливается, осуществляя точное позиционирование штока 3 пневмоцилиндра 1. В то же время упругий элемент 28 возвращает заслонку 25 в исходное положение. Пневмораспределитель 5 соединяет полость 39 пневмоцилиндра 1 с напорной пневмолинией 42.
При повороте вала 41 против часоой стрелки пневмогидравлический слеящий привод работает аналогично.
Таким образом, в процессе работы необходимое быстродействие обеспечивается за счет опережающей отработки входного сигнала пневматическим эле ентом сопло - заслонка.
0
5
0
5
0
Формула изобретения Пневмогидравлический следящий при вод, содержащий пневмодвигатель и гидродвигатель, связанные подвижными элементами, два пневмораспределителя, подключенных к пневмодвигателю, и связанный гидролиниями с гидродвигателем пневмогидравлический преобразователь, включающий поворотную втулку, кинематически связанную с подвижным элементом пневмодвигателя, и поворотный золотник, соединенный с задатчиком и размещенный в глухой расточке втулки, на внутреннем торце которой выполнены пневматические сопла элемента сопло - заслонка, обращенные к торцу золотника и подключенные к камерам управления пневморас- пределителей, отличаю щ и и - с я тем, что, с целью повышения быстродействия и точности, заслонка элемента сопло - заслонка выполнена в виде двух профилированных рычагов, закрепленных с возможностью поворота на внутреннем торце втулки, а золотник снабжен эксцентрично закрепленной на торце осью, свободный конец которой размещен в зазоре между рычагами, поджатыми к нему дополнитепь4-4 но установленным упругим элементом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящий привод | 1989 |
|
SU1682640A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1642098A1 |
| ПНЕВМАТИЧЕСКИЙ НАСОС СУДОВОЙ СИСТЕМЫ ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2602471C2 |
| Гидравлический следящий привод | 1982 |
|
SU1023151A1 |
| Пневмогидравлический следящий привод | 1982 |
|
SU1025924A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1992 |
|
RU2083882C1 |
| Пневмодвигатель | 1979 |
|
SU840514A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2206691C1 |
Изобретение м.б. использовано в системах управления исполнительными органами промышленных роботов и манипуляторов. Цель изобретения - повышение быстродействия и точности следящего привода. Пневмоцилиндр 1 и гидроцилиндр 2 связаны подвижными элементами, например штоками 3,4. Два пневмораспределителя 5,6 подключены к пневмоцилиндру 1. Пневмогидравлический преобразователь связан гидролиниями 9, 10 с гидроцилиндром 2. Преобразователь включает поворотную втулку 11, кинематически связанную со штоками 3,4, и поворотный золотник 13. Золотник 13 соединен с задатчиком 14 и размещен в глухой расточке 15 втулки 11. На внутреннем торце втулки 11 выполнены пневматические сопла 17,18 элемента сопло-заслонка. Сопла 17, 18 обращены к торцу 19 золотника 13 и подключены пневмолиниями 20, 21 к камерам 22, 23 управления пневмораспределителей 5,6. Заслонка элемента сопло-заслонка выполнена в виде двух профилированных рычагов, закрепленных с возможностью поворота на торце. Золотник 13 снабжен эксцентрично закрепленной на торце 19 осью 26, свободный конец к-рой размещен в зазоре между рычагами, поджатыми к нему дополнительно установленным упругим элементом. Необходимое быстродействие обеспечивается за счет опережающей отработки входного сигнала пневматическим элементом сопло-заслонка. 2 ил.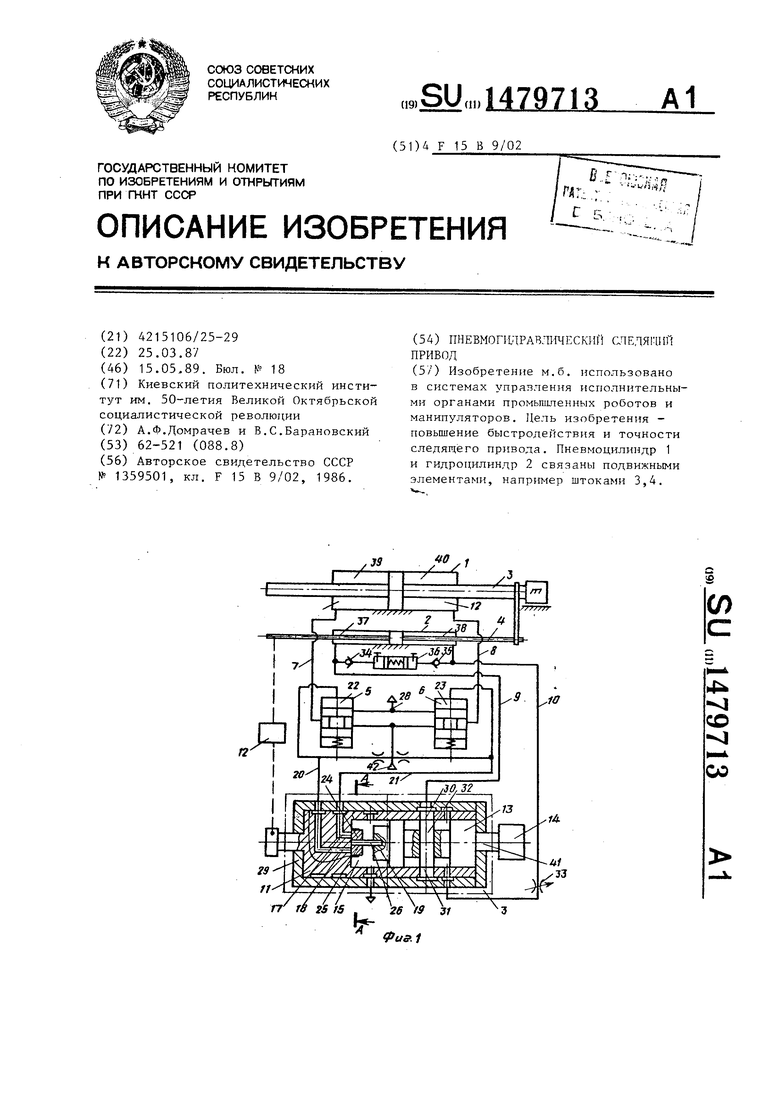
25
фиэ.2
| Пневмогидравлический следящий привод | 1986 |
|
SU1359501A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
