Изобретение относится к области подъемно-транспортного машиностроения, а именно к кранам-манипуляторам.
Целью изобретения является повышение производительности.
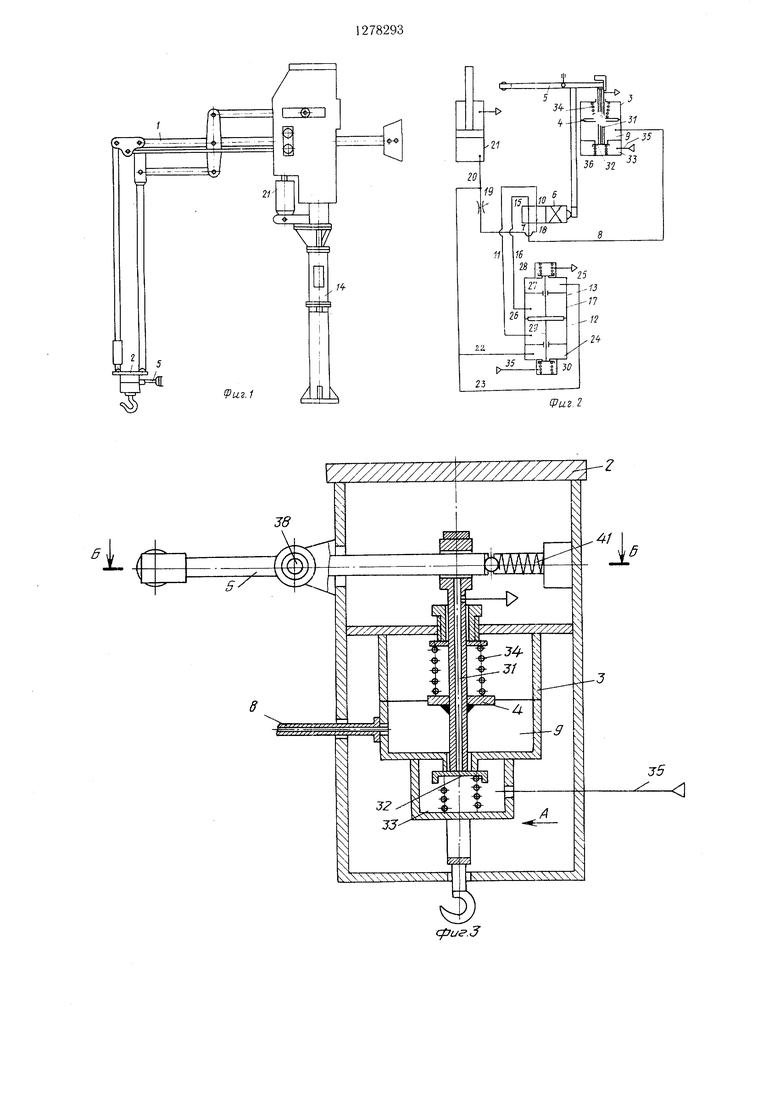
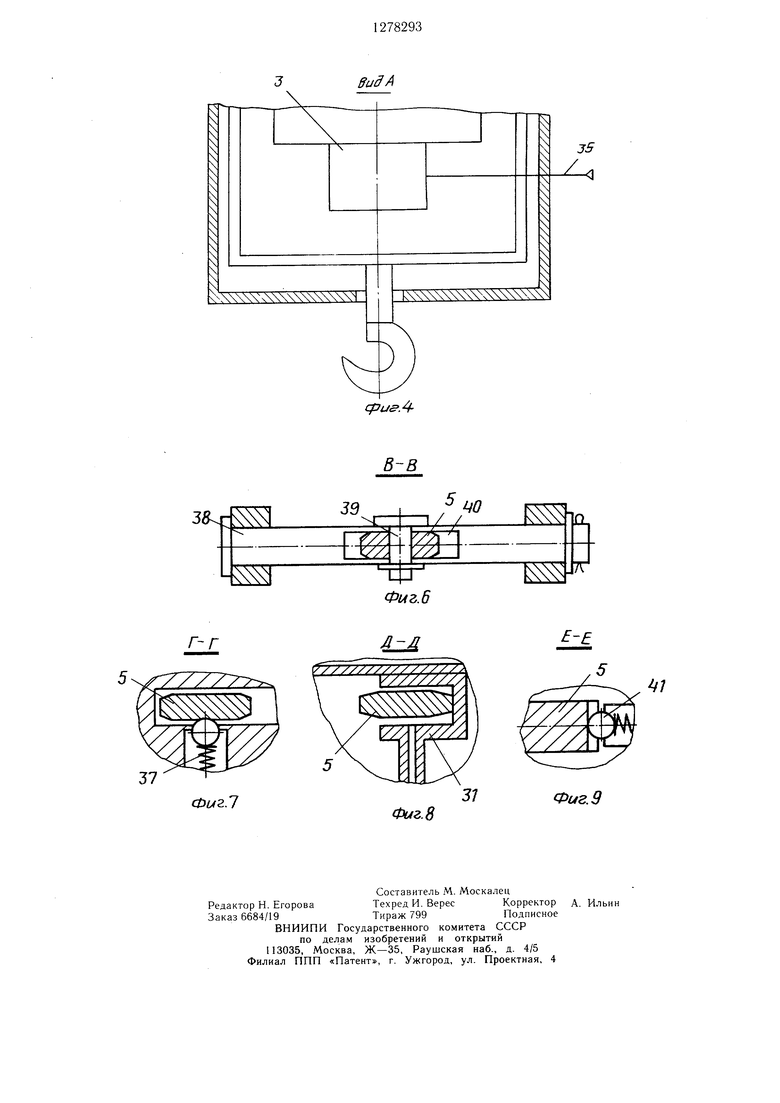
На фиг. 1 схематично изображен кран- манипулятор, обилий вид; на фиг. 2 - пневматическая схема системы управления краном-манипулятором; на фиг. 3 - датчик массы; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг, 3; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - разрез Г-Г .на фиг. 5; на фиг. 8 -- разрез Д-Д на фиг. 5; на фиг. 9 - разрез Е-Е на фиг. 5.
Кран-манипулятор содержит шарнирно- сочлененную стрелу 1, на несущей траверсе 2 которой установлен датчик 3 массы, с чувствительным элементом 4 которого кинематически связана рукоятка 5, установленная на корпусе несущей траверсы 2. На последней установлен и четырехлинейный двухпо- зиционный пневмораспределитель 6, один вход 7 которого посредством магистрали 8 соединен с выходной камерой 9 датчика 3 массы, а другой вход 10 посредством магистрали 11 соединен с управляющей камерой 12 усилителя 13 мощности, установленного на колонне 14 крана-манипулятора. Выход 15 двухпозиционного пневмораспределителя 6 соединен посредством магистрали 16 с задающей камерой 17 усилителя 13 мощности. Выход 18 двухпозиционного пневмораспределителя 6 соединен через дроссель 19 по- средством магистрали 20 с приводным пнев- моцилиндром 21 и посредством магистралей 22 и 23 с входной 24 и выходной 25 камерами усилителя 13 мощности.
Усилитель 13 мощности состоит из чувст- вительного элемента 26, связанного с толкателем 27 клапана 28 и толкателем 29 клапана 30, камер 12, 17, 24 и 25. Датчик 3 массы имеет толкатель 31, связанный с чувствительным элементом 4 и клапаном 32, разделяющим входную 33 и выходную 9 камеры, а также регулируемую пружину 34, которая настраивается на уравновещивание пневмо- цилиндром 21 стрелы 1 крана-манипулятора. Питание пневмосистемы крана-манипулятора осуществляется от источника сжатого воздуха (не показан) через напорную магистраль 35. Рукоятка 5 в положении а сблокирована с двухпозиционным пневмо- распределителем 6 посредством своего рычага 36 и может фиксироваться фиксатором 37, например, подпружиненным щари- ком, а в положении b - выполнена с возможностью поворота в вертикальной плоскости. В горизонтальной плоскости рукоятка 5 имеет возможность поворота вокруг оси 39 по пазу 40, выполненному в оси 38. В положении b рукоятка 5 также может фиксироваться от проворота в горизонтальной плоскости при помощи фиксатора 41, например, подпружиненного щарика.
Кран-манипулятор работает следующим образом.
Для уравновещивания щарнирно сочлененной стрелы 1 в пневмосистему крана- манипулятора подается сжатый воздух по напорной магистрали 35 от источника сжатого воздуха. Пружина 34 датчика 3 массы, воздействуя на чувствительный элемент 4, перемещает его вместе с толкателем 31 в сторону клапана 32. Толкатель 31 воздействует на клапан 32, в результате чего сжатый воздух начинает поступать из входной 33 в выходную 9 камеру датчика 3 массы. Далее по магистрали 8 через вход 7 и выход 15 двухпозиционного пневмораспределителя 6 сжатый воздух поступает по магистрали 16 в задающую камеру 17 усилителя 13 мощности. Чувствительный элемент 26 усилителя 13 мощности, прогибаясь, воздействует на толкатель 29, который, перемещаясь в сторону клапана 30, открывает его. В результате сжатый воздух из напорной магистрали 35 поступает а камеру 24 усилителя 13 мощности, далее по магистралям 32 и 20 - в пневмоцилиндра 21, а по магистралям 22 и 23 - в камеру 25 усилителя 13 мощности. Одновременно воздух из управляюн1ей камеры 12 усилителя 13 мощности по магистрали 11 через вход 10 и выход 18 пневмораспределителя 6, по магистрали 20 через дроссель 113 поступает в пневмоцилиндр 21. Процесс продолжается до тех пор, пока давление в выходной камере 9 датчика 3 массы не уравновесит усилие пружины 34, в результате.чего подача сжатого воздуха в задающую камеру 17 усилителя 3 мощности прекратится, а давление в ней и в управляющей камере 12 не выровняется. Клапан 30 закроется. Созданное таким образом давление в пневмоиилиндре 21 уравновесит стрелу 1 крана-манипулятора.
Захват крана-манипулятором груза осуществляется при помощи рукоятки 5 астатического управления путем создания в пнев- моцилиндре 21 избыточного давления для преодоления усилия, возникающего от действия сил трения в щарни.рах параллело- граммой и манжет о зеркало пневмоцилиндра 21. Рукоятка 5 находится в положении Ь. При пере.мещении рукоятки 5 на оси 38 вверх она воздействует на толкатель 31 датчика 3 массы, перемещая его в сторону клапана 32. Клапан 32 открывается, и сжатый воздух из напорной магистрали 35 поступает через пневмораспределитель 6 и усилитель 13 мощности в пневмоцилиндр 21, что вызывает подъем стрелы 1 с захваченным грузом вверх. После возврата рукоятки 5 в исходное положение и фиксации ее фиксатором 41 клапан 32 закрывается. Давление в камерах 9 и 33 датчика 3 массы и в камерах 12 и 17 усилителя 13 мощности выравнивается и подъем груза прекращается.
Далее рукоятку 5 переводят в положение а, поворачивая ее в горизонтальной плоскости по часовой стрелке на оси 39 до упора ее в стенку паза 40, выполненнпго в оси 38. При этом рычаг 36 рукоятки 5 пpc| звoдит переключение двухпозиционного пневморас- пределителя б, а сама рукоятка фиксируется в этом положении фиксатором 37, например, подпружиненным шариком. В результате переключения двухпозиционного пневморас- пределителя 6 выходная камера 9 датчика 3 массы соединяется с управляющей камерой 12 усилителя 13 мощности, а задающая камера 17 усилителя 13 мощности соединяется через дроссель 19 с пневмоци- линдром 21, входной 24 и выходной 25 камерами усилителя 13 мощности.
Дальнейшее манипулирование осуществ- ляется позиционно - за груз. При воздействии оператора на груз сверху вниз толкатель 31 начинает перемещаться в сторону клапана 32, открывая его. Сжатый воздух из напорной магистрали 35 поступает в выходную камеру 9 датчика 3 массы и далее через двухпозиционный пневмораспредели- тель 6 в управляющую камеру 12 усилителя 13 мощности. Давление в камере 12 увеличивается. В результате чувствительный элемент 26 прогибается, перемещая толка- тель 27 в сторону клапана 28. Клапан 28 открывается и осуществляет стравливание сжатого воздуха из пневмоцилиндра 21, связанного с задающей 17 и выходной 25 камерами усилителя 13 мощности. В результате стрела 1 крана-манипулятора с захва- ченным грузом опускается.
Для поднятия груза оператор воздействует на него снизу вверх. В результате этого чувствительный элемент 4 прогибается, сжимая пружину 34, происходит стравливание воздуха из датчика 3 массы. Давление в вы- ходной камере 9 датчика 3 массы, а следовательно, и в связанной с ней через пневмо- распределитель 6 управляющей камере 12 усилителя 13 мощности падает. Давление в камере 12 становится меньще, чем в задающей камере 17 усилителя 13 мощности. В ре- зультате этого чувствительный элемент 26, прогибаясь, перемещает толкатель 29 в сторону клапана 30. Клапан 30 открывается, и сжатый воздух из напорной магистрали 35 поступает в камеру 24 усилителя 13 мощ- ности и далее по магистралям 22 и 20 в пнев- моцилиндр 21, вызывая перемещение его щтока, а следовательно, и стрелы 1 крана- манипулятора с; захваченным грузом вверх.
Для окончательного опускания груза рукоятку 5 управления переводят из положе- ния а в положение Ь, переключая при этом двухпозиционный пневмораспределитель 6. Рукоятка 5 при этом фиксируется фиксатором 41, например, подпружиненны.м шариком. Оператор нажимает на стрелу 1 крана-манипулятора. В результате нагрузка на поршень пневмоцилиндра 21 увеличивается, давление в нем и в камерах 12, 24, 25 усилителя 13 мощности повышается. Чувствительный элемент 26 усилителя 13 мощности прогибается, воздействуя на толкатель 27 и клапан 28. Клапан 28 открывается, стравливая воздух из пневмоцилиндра 21. При этом шток пневмоцилиндра 21, а следовательно, и стрела 1 крана-манипулятора с захваченным грузом опускается.
Формула изобретения
Кран-манипулятор, содержаший закрепленную одним Концом на стойке шарнирно- сочлененную стрелу, на свободном конце которой смонтирована несущая траверса, и пневмопривод, включающий в себя пнев- моцилиндр подъема и опускания стрелы, установленный в корпусе несушей траверсы с устройством его переключения двухпозиционный пневмораспределитель, усилитель мощности, выполненный с входной, выходной, подклапанной и следящей камерами, и смонтированный на несущей траверсе датчик массы, выполненный с входной и выходной камерами, при этом напорная магистраль сообщена с входной камерой датчика массы и подклапанной камерой усилителя мощности, входная и выходная камеры которого сообщены с рабочей полостью пневмоцилиндра подъема и опускания стрелы, отличающийся тем, что, с целью повышения производительности, пневмопривод снабжен дросселем, усилитель мощности выполнен с дополнительной камерой, расположенной между следящей и входной камерами, а двухпозиционный пневмораспределитель выполнен четырехлинейным, при этом его входы сообщены с выходной камерой датчика массы и дополнительной камерой усилителя мощности, а выходы - со следящей камерой усилителя мощности и через дроссель - с рабочей полостью пневмоцилиндра подъема и опускания стрелы, входной и выходной камерами усилителя мощности, причем датчик массы связан через толкатель с рукояткой ручного управления, которая установлена на несущей траверсе с возможностью поворота в вертикальной и горизонтальной плоскостях, устройство переключения двухпозиционного пневмораспределителя выполнено в виде рычага, жестко связанного с рукояткой ручного управления, а несущая траверса выполнена с размещенными в ее корпусе фиксаторами для рукоятки ручного управления и рычага.
F
Г5
i
R ilr
j
}i
-27
i
3S J2
2/
и
/4
/.
E:
/ff
18
75 28 IT
2«
27
25 13
r ll
-12 I f
iPui.l
ii
J5
5C
гз
fpuz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Пневматическая система грузоподъемного устройства | 1986 |
|
SU1762759A3 |
| Манипулятор | 1984 |
|
SU1283087A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
Изобретение относится к области подъ- емно-транснортного машиностроения, а именБ-Б но к кранам-манипуляторам. Цель изобретения - повышение производительности крана. Кран содержит шарнирно-сочлененную стрелу с несуш,ей траверсой 2, пневмопривод, включающий в себя пневмоцилиндр подъема и опускания стрелы, двухпозиционный пнев- мораспределитель 6, усилитель мошности, датчик массы 3, связанный через толкатель с рукояткой 5 ручного управления, фиксаторами 37, 41, размеш,енными на корпусе траверсы 2. Для окончательного опускания груза рукоятку 5 переводят из положения а в положение Ь, переключая при этом двухпозиционный пневмораспределитель 6, при этом рукоятка фиксируется фиксатором 41. 9 ил. Фиг. 5 (Л 00 ю со со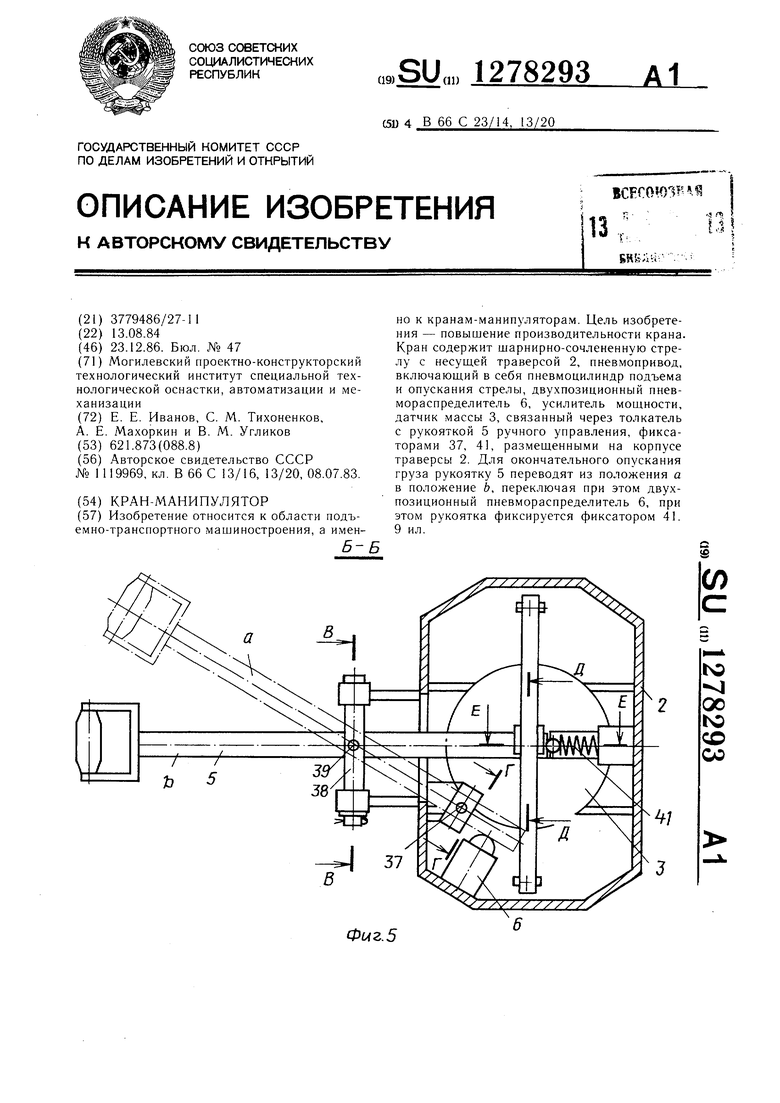
Jff
8
сриг.З
Г-г
сри&Л
Фиг. 6
4
Е-Е
Фиг.7
Фиг. 8
Фиг. 9
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
