Изобретение относится к машиностроению, в частности к пневматичес- KIJM исполнительньм механизмам с узлами управления, и может быть использовано в качестве силового позиционного привода в различных производственных установках и летательных аппаратах.
Целью изобретения является упрощение конструкции и улучшение динамических характеристик привода.
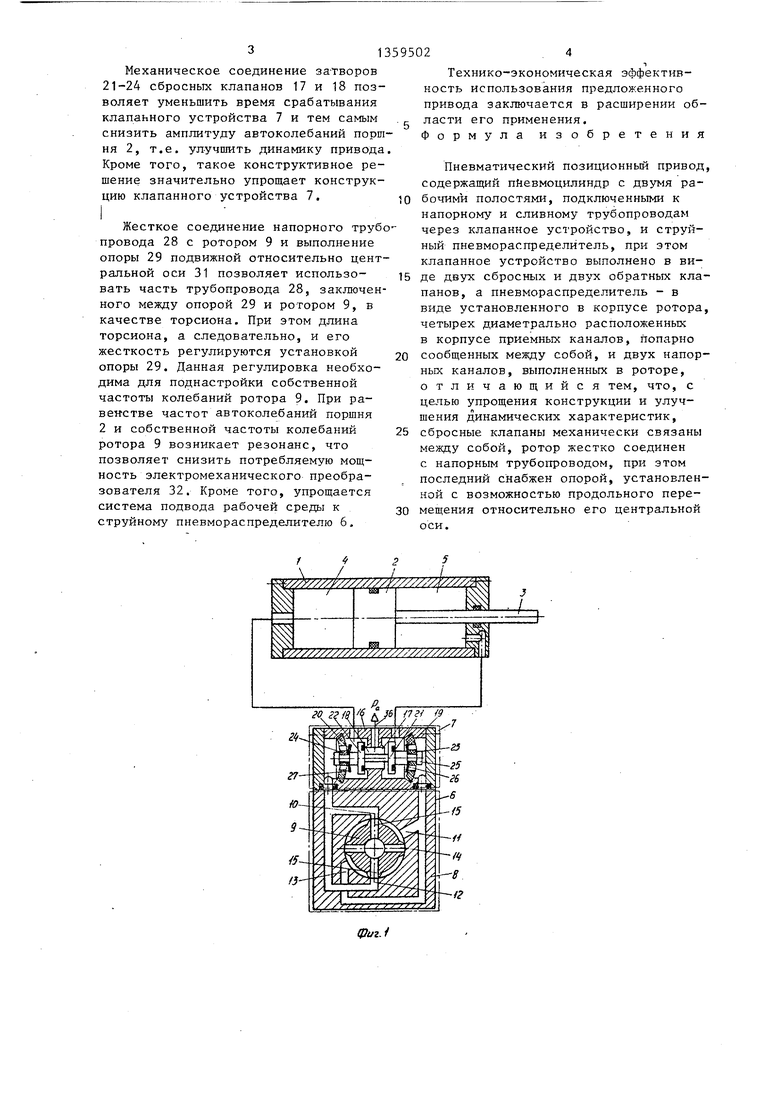
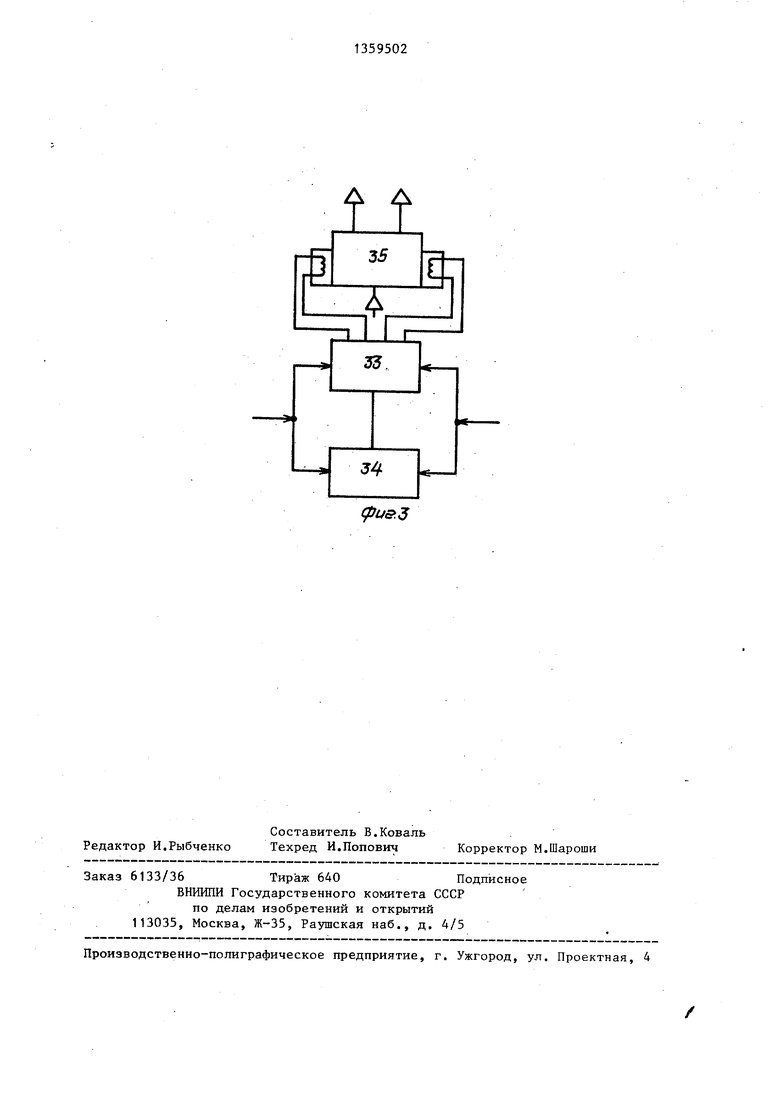
На фиг, 1 представлена конструктивная схема привода; на фиг. 2 - схема креплений элементов пневморас- пределителя; на фиг, 3 - структурная схема управления приводом..
Пневматический позиционный привод (фиг.1) содержит пневмоцилиндр 1 с установленными в нем поршнем 2 и штоком 3 с образованием двух рабочих полостей 4 и 5, струйный пневморас- пределитель 6, клапанное устройство 7. Пневмораспределитель 6 выполнен в виде установленного в корпусе 8 ротора 9, четырех диаметрально расположенных в корпусе приемных каналов 10-13, попарно сообщенных между собой, и двух напорных каналов 14 и 15, выполненных в роторе 9. Клапанно устройство 7 содержит корпус 16 с расположенными в нем двумя сбросными кла.панами 17, 18 и двумя обратными клапанами 19, 20, Затворы 21-24 сбросных клапанов 17 и 18 механически связаны между собой валом 25, на котором также закреплены затворы 26 и 27 обратных клапанов 19 и 20.
Ротор 9 (фиг.2) жестко соединен с напорным трубопроводом 28, который снабжен опорой 29, установленной на основании 30 с возможностью продольного перемещения относительно центральной оси 31 трубопровода 28. Поворот ротора 9 пневмораспределителя 6 осуществляется электромеханическим преобразователем 32. .
Задающий сигнал .поступает на систему 33 управления (фиг.З) и модель- наблюдатель ,34 Люенбергера, Распределительное устройство 35 включает струйный Пневмораспределитель 6 и клапанное устройство 7. Кроме того, на систему 33 управления и модель- наблюдатель 34 Люенбергера поступает сигнал от датчика положения (не пока зан) штока 3. Сброс рабочей среды осушествляет.ся через сливной трубопровод 36 (фиг,1).
Пневматический позиционный привод работает следующим образом.
При поступлении на систему 33 управления и модель-наблюдатель 3 Люенбергера задающего сигнала возникает сигнал рассогласования, пропорциональной разности между заданной позицией и текуи;им положением штока
3. Например, при положительном значении рассогласования поршень 2 должен совершать движение слева направо (по фиг.1). При этом электромеханический преобразователь 32 поворачивает ротор 9 струйного пневмораспределителя 6 таким образом, что напорный клапан 15 соединяется с приемными ка налами 10 и 12 (см,фиг.1). Б результате клапанное устройство 7
соединяет рабочую полость 4 с напорным -трубопроводом 28, а рабочую полость 5 - со сливным трубопроводом 36, Рабочая среда, поступающая из приемных каналов 10 и 12, воздействуя на затворы 22, 24 и 27, закрывает сбросной клапан 18 и открывает обратный и сбросной клапаны 20 и 17, Рабочая среда, поступающая из рабочей полости 5, воздействуя на затвор
21, закрывает обратный клапан 19.
При смене знака сигнала рассогласования электромеханический преобразователь 32 поворачивает ротор 9 таким образом, что напорный канал 14
соединяется с приемными каналами 11 и 13. Рабочая среда поступает в полость 5, а полость 4 соединяется с атмосферой. Это приводит к торможению штока 3 при подходе к заданной
позиции,
В пределах заданной по зиции поршень 2 совершает автоколебания с постоянной частотой и амплитудой, которые возникают вследствие периодической смены знака сигнала рассогласования. При отработке заданной позиции с установленной точностью необходимо, чтобы амплитуда автоколебаний не превосходила величины заданной
точности. Это достигается введением дополнительных корректирующих обратных связей по скорости, а в отдельных случаях и по ускорению движения штока 3. Введение в схему привода
модели-наблюдателя 34 Люенбергера
позволяет.получить сигналм,пропорциональные скорости и ускорению поршня 2, без применения соответствующих датчиков.
31
Механическое соединение за-творов 21-24 сбросных клапанов 17 и 18 позволяет уменьшить время срабатывания клапанного устройства 7 и тем самым снизить амплитуду автоколебаний поршня 2, т.е. улучшить динамику привода Кроме того, такое конструктивное решение значительно упрощает конструкцию клапанного устройства 7.
Жесткое соединение напорного трупровода 28 с ротором 9 и выполнение опоры 29 подвижной относительно ценральной оси 31 позволяет использовать часть трубопровода 28, заключеного между опорой 29 и ротором 9, в качестве торсиона. При этом длина торсиона, а следовательно, и его жесткость регулируются установкой опоры 29. Данная регулировка необходима для поднастройки собственной частоты колебаний ротора 9. При равенстве частот автоколебаний поршня 2 и собственной частоты колебаний ротора 9 возникает резонанс, что позволяет снизить потребляемую мощность электромеханического преобразователя 32. Кроме того, упрощается система подвода рабочей среды к струйному пневмораспределителю 6.
Технико-экономическая эффективность использования предложенного привода заключается в расширении области его применения. Формула изобретения
Пневматический позиционный привод, содержащий пйевмоцилиндр с двумя ра- 10 бочими полостями, подключенными к напорному и сливному трубопроводам через клапанное устройство, и струйный пневмораспределитель, при этом клапанное устройство выполнено в ви- 15 де двух сбросных и двух обратных клапанов, а пневмораспределитель - в виде установленного в корпусе ротора, четырех диаметрально расположенных в корпусе приемных каналов, попарно
0 сообщенных между собой, и двух напорных каналов, выполненных в роторе, отличающийся тем, что, с целью упрощения конструкции и улучшения динамических характеристик,
5 сбросные клапаны механически связаны между собой, ротор жестко соединен с напорным трубо1троводом, при этом последний снабжен опорой, установленной с возможностью продольного пере0 мещения относительно его центральной о си.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневмопривод | 1986 |
|
SU1359503A1 |
| Бесштоковый позиционный магнитопневматический привод | 1982 |
|
SU1092310A1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| Система регулирования паровой турбины | 1986 |
|
SU1401147A1 |
| Пневматический привод | 1982 |
|
SU1114823A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Пневмопривод | 1988 |
|
SU1583670A1 |
| Бесштоковый позиционный магнитопневматический привод | 1990 |
|
SU1732010A1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2053376C1 |
| Пневмогидравлический привод | 1984 |
|
SU1247585A1 |
Изобретение м.б. использовано в качестве силового привода в различных производственных установках и летательных аппаратах. Цель изобретения - упрощение к-ции и улучшение динамических х-к привода. Для этого сбросные клапаны механически связаны между собой, а ротор 9 жестко соединен с напорным трубопроводом (ТП) 28. ТП 28 снабжен опорой 29, установленной на основании 30 с возможностью продольного перемещения относительно его центральной оси 31. Это позволяет использовать часть ТП 28, заключенную между опорой 29 и ротором 9, в качестве торсиона, длина и жесткость к-рого регулируются установкой опоры, что обеспечивает поднастройку собственной частоты колебаний ротора. При равенстве частот автоколебаний поршня пневмоцилиндра и собственной частоты колебаний ротора 9 возникает резонанс, что позволяет снизить потребляемую мощность электромеханического преобразователя 32. 3 ил. i (Л 3 29 31 о: ел со сл .2
It
fra
Редактор И.Рыбченко
Составитель В.Коваль Техред И.Попович
Заказ 6133/36 Тираж 640Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(ри&.З
Корректор М.Шароши
| Пневматический привод | 1982 |
|
SU1114823A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
