Изобретение относится к машиностроению, а именно к автоматизации технологических процессов, и нредназначено для. ориентированной выдачи длинномерных ферромагнитных уголковых заготовок в автоматическую поточную технологическую линию.
Цель изобретения - повышение надежности и безопасности работы устройства путем обеспечения отделения электромагнитом одной заготовки из пакета заготовок и ее пос.ледуюц ей ориентации и передачи к транспортеру с фиксацией, исключающей выпадение заготовки.
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. I; на фиг. 3 - схема ориентирования заготовки рычажным механизмом; на фиг. 4 - схема расположения заготовки на захватном органе; на фиг. 5 - то же, на рычагах рычажного механизма.Устройство содержит бункер I, установленную на стойке 2 поворотную консоль 3, с размещенной на ней кареткой 4, приемный транспортер 5 и систему управления, снабженную датчиками. Бункер 1 имеет наклонные стенки 6 и снабжен подъемным столом 7, установленным внутри последнего, а .в верхней части бункера 1 установлены датчики 8 положения заготовок 9. На стойке 2 закреплен фиксатор 10,. нредназна- ченный для установки поворотной консоли 3 в определенном положении. На поворотной консоли 3 размещены путевые датчики 11 - 13 расположения каретки 4.
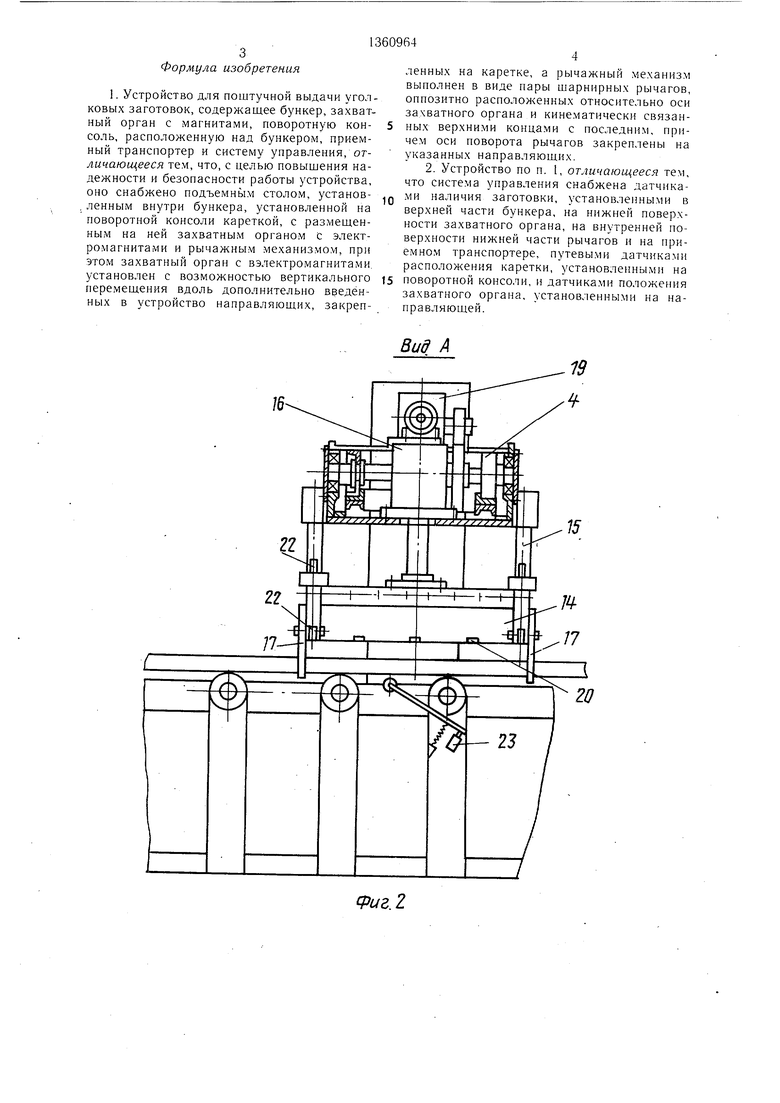
. Каретка 4 содержит захватный орган 14 с электромагнитами и рычажный механизм. На каретке 4 закреплены вертикальные направляющие 15, а захватный орган 14 с электромагнитами с.монтирован с возможностью перемещения вдоль последних гюсредство.м привода 16. При этом рычажный механизм выполнен в виде пары щарнирных рычагов 17, оппозитно расположенных относительно оси захватного органа 14 и кине.ма- тически связанных верхни.ми концами с последним, причем оси 18 поворота рычагов 17 закреплены на указанных направляющих 15. Кроме того, на каретке 4 установлен привод 19 горизоптального перемещения последней вдоль поворотной консоли 3. На нижней поверхности захватного органа 14 установлены датчики 20 положения заготовки 9, на внутренней поверхности нижней части рычагов 17 - датчики 21 положения заготовки 9, а на направляющих 15 - датчики 22 гюложения захватного органа 14. Приемный транспортер 5 снабжен датчико.м 23 наличия заготовки 9.
Устройство работает следующим образом.
Поворотная консоль 3 снимается с фиксатора 10 и поворачивается на 90° относительно стойки 2. Пакет заготовок 9 загружается в бункер 1. Подъемный стол 7 выводит пакет заготовок 9 на уровень распо
5
0
5
0
0
5
0
5
ложения датчиков 8, образуя межу верхней поверхностью пакета заготовок 9 и электромагнитами захватного органа 14 в исходном положении расчетный зазор A|.
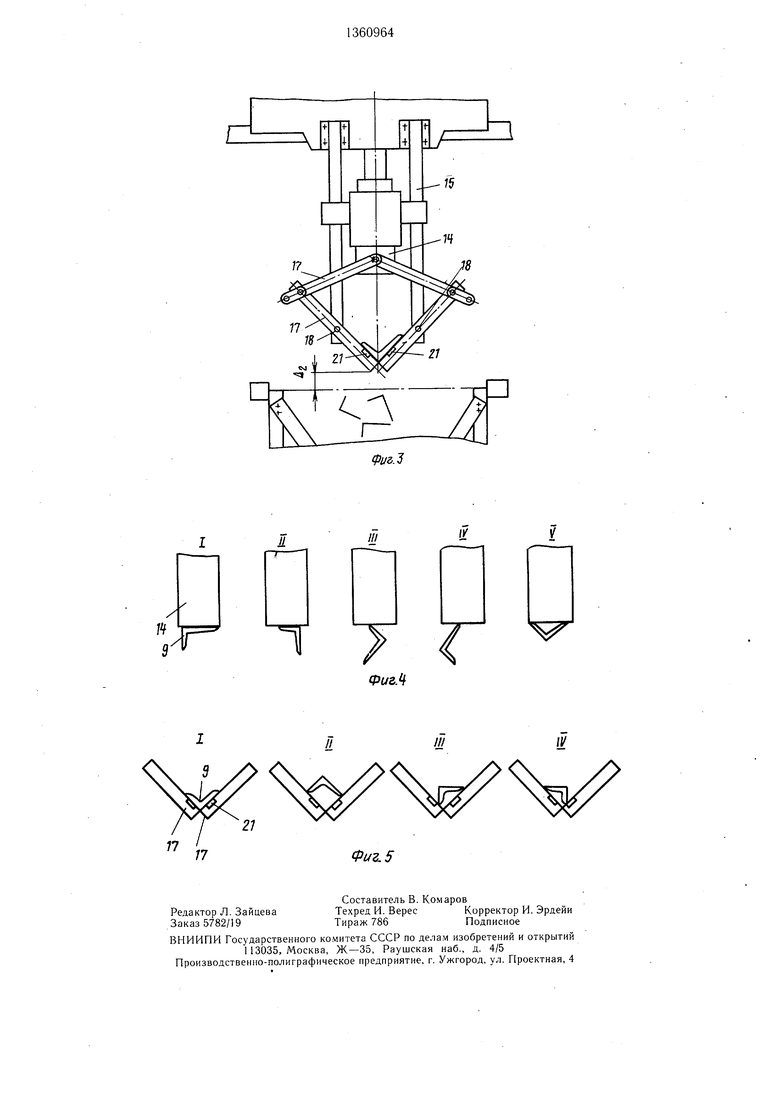
Величина зазора Л: регулируется перемещением датчиков 8 в вертикальном направлении и выдерживается такой, чтобы электромагнит смог оторвать только одну сво-- бодно лежащую заготовку. Наклонные стенки 6 бункера 1 обеспечивают при подъеме развал пакета заготовок 9. Захватный орган 14 с электромагнита.ми с помощью приводов 19 и 16 подводится в исходное положение, которое в горизонтально.м направлении ограничивается датчиком 11,а в верти- кально.м - нижним датчиком 22. Далее захватный орган 14 в режиме «Поиск движется с помощью привода 19 над свободной поверхностью заготовок 9 с установленным в наладочном режиме зазором Л|. Ограничение перемещения над бункером 1 осуществляет датчик 12 В режиме «Поиск элект- ро.магниты притягивают одну свободно лежа- гцую заготовку 9. После притяжения заготовки 9 срабатывает датчик 20 наличия заготовки 9 на электромагните и выдает команду на подъе.м захватного органа 14 приводу 16. Подъем осуществляется до момента срабатывания верхнего датчика 22. При этом одновременно срабатывает кинематически связанный рычажный механизм. На электромагните заготовка занимает одно из положений, показанное на фиг. 4. В верхне.м положении электромагниты отключаются и заготовка 9 (из любого положения на электромагните) падает на состыкованные под углом рычаги 17 рычажного механиз.ма. Если заготовка 9 принимает положение 1, показанное на фиг. 5 и замыкает одновре.мен- но два датчика 21, то каретка перемеп;а- ется с привода 19 к приемно.му транспортеру 5 вдоль поворотной консоли 3 до датчика 13. После срабатывания датчика 13 электро.магниты с помон|ью привода 16 начинают опускаться, и рычаги 17 расходятся. Sai OTOBKa 9 при этом подается в ориентированном положении на приемный транспортер 5, замЕ 1кает датчик 23, и последний перемещает ее в зону обработки. Если заготовка 9 занимает на рычагах 17 рычажного .механизма положение II, III или IV, то датчики 21 не замыкаются. В этом случае захватный орган 14 производит сброс заготовки 9 в бупкер 1 за счет опускания последнего и разведения рычагов 17. Экспериментально установлено, что 85...90% заготовок 9 располагаются в необходимом ориентированно.м положении I (фиг. 5) на рычагах 17. Это достигается тем, что электро.магниты вьнюлнены узкими, а в нужное ориентированное положение нереходят по- л ожения III, IV, V (фиг. 4). Кроме того, нужно отметить, что положения 111 и IV наиболее вероятные при узком элект- ро.магните и его движении поперек бункера в режиме «Поиск.
Формула изобретения
1. Устройство для поштучной выл,ачи уголковых заготовок, содержащее бункер, захватный орган с магнитами, поворотную кон- соль, расположенную над бункером, приемный транспортер и систему управления, ог- личающееся тем, что, с целью повышения надежности и безопасности работы устройства, оно снабжено подъемнь1м столом, установ- ленным внутри бункера, установленной на поворотной консоли кареткой, с размешенным на ней захватным органом с электромагнитами и рычажным механизмом, при этом захватный орган с вэлектромагнитами установлен с возможностью вертикального неремешения вдоль дополнительно введённых в устройство направляюш,их, закрепленных на каретке, а рычажный механизм выполнен в виде пары шарнирных рычагов, оппозитно расположенных относительно оси захватного органа и кинематически связанных верхними концами с последним, причем оси поворота рычагов закреплены на указанных направляющих.
2. Устройство по п. 1, отличающееся тем, что система управления снабжена датчиками наличия заготовки, установленными в верхней части бункера, на нижней поверхности захватного органа, на внутренней поверхности нижней части рычагов и на приемном транспортере, путевыми датчиками расположения каретки, установленными на поворотной консоли, и датчиками положения захватного органа, установленными на направляющей.
Вид А
fpue.Z
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения листа от стопы и подачи его к обрабатывающей машине | 1983 |
|
SU1098625A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Устройство для поштучной выдачи длинномерных заготовок | 1981 |
|
SU986714A1 |
| Устройство для загрузки заготовок | 1978 |
|
SU789676A1 |
| ДЕЛИТЕЛЬНО-ЗАКАТОЧНЫЙ АВТОМАТ ДЛЯ ПРОИЗВОДСТВА ТЕСТОВЫХ ЗАГОТОВОК БАРАНОЧНЫХ ИЗДЕЛИЙ | 2012 |
|
RU2490895C1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ШТУЧНЫХ ЗАГОТОВОК МЕЖДУ ПРЕССАМИ12 | 1972 |
|
SU326015A1 |
| Полуавтомат для обшивания креповой тесьмой дна бумажных мешков | 1957 |
|
SU112312A1 |
| Установка для резки листового проката | 1982 |
|
SU1017439A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КРОМОК ЗАГОТОВОК ПРЯМОУГОЛБНЫХ ПЛАСТМАССОВБ1Х ДЕТАЛЕЙ | 1970 |
|
SU272531A1 |
Изобретение относится к машиностроению, а именно к автоматизации технологических процессов, и предназначено для ориентированной выдачи длинномерных ферромагнитных уголковых заготовок в автоматическую поточную технологическую линию. Целью изобретения является повышение надежности и безопасности работы устройства путем обеспечения отделения электромагнитом одной заготовки из пакета заготовок и ее последующей ориентации и передачи к транспортеру с фиксацией, исключающей выпадение заготовки. Заготовка 9 подается захватным органом 14 с электромагнитами, установленными с определенным зазором над пакетом заготовок бункера 1, а затем в работу вступает рычажный механизм, на рычагах 17 которого после отключения электромагнитов заготовка самоустанавливается. При правильно ориентированном положении заготовки 9 одновременно замыкаются два датчика 21, которые дают команду на перемещение каретки 4 вдоль поворотной консоли 3 и выгрузки указанной заготовки на приемный транспортер 5. При неправильно ориентированном положении заготовки 9 последняя сбрасывается в бункер 1. Затем цикл работы повторяется. 1 з.п. ф-лы, 5 ил. (0 (Л г It 19 2 3 iS /СО о о со Oi 
ji
/
г
т 7
111
/К
Фиг, 5
Составитель В. Комаров Техред И. ВересКорректор И. Эрдейи
Тираж 786Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для поштучной выдачи длинномерных заготовок | 1981 |
|
SU986714A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
