(54) ШЕВМОГИДРАВЛИЧЕСКИЙ 1ЩФРОВОЙ ПОЗИЦИОННЫЙ
ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневмогидравлический позиционныйпРиВОд | 1979 |
|
SU795869A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Пневмогидравлический привод с объемным регулированием координаты | 1980 |
|
SU921769A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Пневмогидравлический привод металлорежущих станков | 1978 |
|
SU779001A1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Пневмогидравлический привод много-МЕСТНыХ зАжиМНыХ пРиСпОСОблЕНий TEXHO-лОгичЕСКОгО ОбОРудОВАНия | 1979 |
|
SU795865A2 |
I
Изобретение относится к машиногстроению, в частности станко- и агрегатостроению, и может быть использовано в качестве позиционного привода суппортов станков, промьшшенных роботов и.других гидрофицированных исполнительных механизмов .
Существует пневмогидравлический цифровой привод, в котором перемещение исполнительного гидродвигателя определяется дозой рабочей жидкости, равной разности полного- объема гидрополости мультипликатора и объема дозы жвдкости, нагнетаемой мультипликатором в гидравлическую камеру цифрового задатчика при движении поршней разрядов в исходное положениео Предельная точность позиционирования гидродвигателя определяется дискретностью младшего разряда задатчика, а его максимальное перемещение объемом минимапьной дозы задатчика, нагнетаемой при перемещении его выходного звена. При этом управление перемещением гидродвигателя ведется по косвенному параметру, что увеличивает ошибку позиционирования исполнительного двигателя fl.
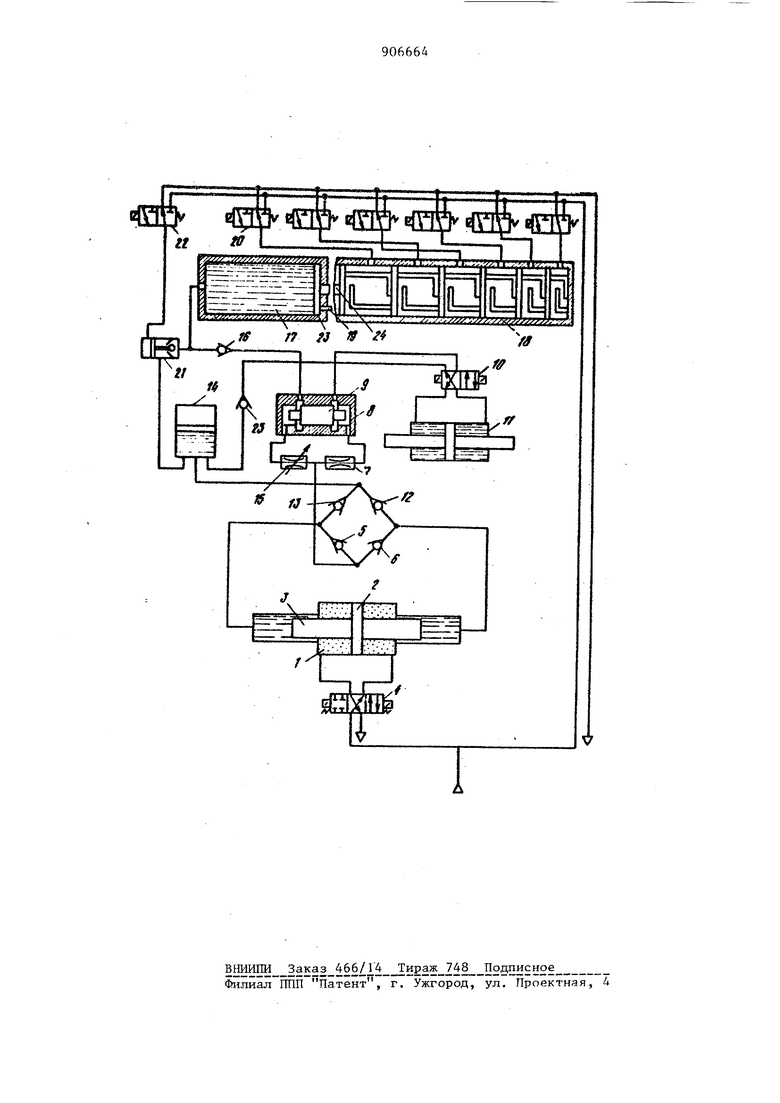
Разработанная система позиционирования позволяет устранить указанные недос атки, в частности,
10 при достаточно большой разрешающей способности младшего разряда становится возможным обеспечить необходимую точность перемещения исполнительного гидродвигателя, вес«5ти управление по прямому параметру/ объему дозы нагнетаемой из гидрокамеры задатчика, а также применять исполнительные гидроцилиндры меньших эффективных площадей, что позво20лит существенно увеличить рабочие ходы их поршней при одном и том же объеме в гидрополости мультипликатора. 3Ч iii-ib Huxipe гения - оСи снеченле i4.4iiJCTH позиционирования, Цель достигается тем, что в принчде гидравлические обратные клапаны моста мультипликатора своими нходами сообщены с напорными гидрополостями, а выходами - со входами постоянного и регулируемого дрос селей, при этом постоянный дроссель своим выходом соединен с правой полостью делителя потока, выход которого подключен ко входу гвдравлического распределителя, сообщенного с напорной полостью гидродвига теля, а регулируемый дроссель соеди ней с левой полостью делителя потока, выход которого через гидравлический обратный клапан сообщен параллельно с бесштоковой полостью ги равлической камеры цифрового задатчика координаты и со входом управля емого обратного гидроклапана, выход которого сообщен с компенсационной емкостью, а управляющая камера через двухпозиционный пневмораспределитель с источником сжато о газа. Сливная полость гидравлического двигателя подключена ко входу гидравлического обратного клапана, выход которого сообщен с компенсационной емкостью, а также тем, что в крьшке гидравлической камеры цифрового задатчика со стороны штоковой полости установлен концевой выключатель с На чертеже представлен пневмогидравлический цифровой позиционный привод Пневмогидравлический позиционный привод состоит из пневмогидравлического мультипликатора 1 двустороннего действия,: содержащего поршень 2 с плунжером 3, пневмополости которого сообщены с выходами трехпозиционного силового пневморас пределителя 4, запитанного от пневмосети. Гидравлические полости муль типликатора 1 связаны через обратные клапаны 5 и 6, дроссель 7, правую полость делителя потока 8, соде жащего золотник 9, со входом гидрав ческого распределителя 10 гидродвигателя I 1 и парал-пельно через обратные клапаны 12 и 13 с компенсаци онной емкостью 14, а через регулиру емый дроссель 15, полость делителя потока И и обратный клапан 16 с гид рок Гой 1/ цифрового задатчика 18 В крышке гидрокамеры I7 со стороны штоковой полости установлен конценой электровыключатель 19. К камерам разрядов цифрового з здатчика 18 подключены электропневмоклапаны 20, входы которых сообщены с пненмосетью. К гидрокамере 17 цифрового пневматического задатчика 18 подключен своим входом управляемый падроклапан 21, с управляющей полостью которого через злектропневмоклапан 22 сообща ется пневмосеть, а выход гидроклапана 21 сообщается с компенсацио} ной емкостью 14. Задатчик 18 выполнен в виде И-разрядного цифро-аналогового преобразователя, имеет гидравлическую камеру 17 с порщнем 23, который связан с выходным звеном 24 задатчика 18. Сливная полость гидродвигателя 11 через гидрораспределитель 10 и обратный клапан 25 сообщена с компенсационным бачком 14. Работа привода осуществляется следующим образом. При подаче команды на один или несколько электроиневмоклапанов 20 цифрового пневмозадатчика 18 от электрической системы управления срабатывают поршни соответствующих разрядов и выходное звено 24 задатчика 18 перемещается на заданное расстояние, вытесняя поршнем 23 соответствукяций объем масла через управляемый обратный клапан 2 в компенсационную емкость 14, при этом гидроклапан открыт управляюпщм давлением от пневмораепределителя 22, который срабатывает одновременно с подачей команды на любой из электроклапанов 20. После срабатывания цифрового задатчика 18 пневмораспределитель 4 переключается в одно из рабочих положений, при этом закрывается управляемый обратный клапан 21 и поршень 2 со штоком 3 мультипликатора двухстороннего действия 1 перемещается влево или вправо в соответствии с управляющим сигналом, поданным на пненмораспределитель 4, нагнетая рабочую жидкость из соответству ощей гидрополости через обратный клапан 5 (если поршень движется влево) или 6 (если поршень движется вправо), дроссель 7 правую полость делителя потока 8 в соответствукиций канал гидрораспределителя 10 исполнительного гидроцилиндра 11, слив от которого через паспределитель 10 и обратный гидро5 . 9 Kjiaiidii 25 поступает в компенсационный бачок 14. Одновременно опреде ленная часть жидкости, количество которой регулируется дросселем 15, через регулируемый дроссель 15, левую полость делителя потока 8 и обратный гидроклапан 16 поступает в бесштоковую полость камеры I7 цифрового задатчика 18, возвращая его разряды в исходное положение при отключенных электропневмоклапанах 2 Регистрация исходного (конечного) положения разрядов цифрового задатчика 18 осуществляется концевым вы ключателем 19. Для того, чтобы поддерживать стр го пропорциональными расходы в пнев мозадатчик и гидроцилиндр, в схеме предусмотрен делитель потока,работающий следующим образом. При изменении расхода, например, через дроссель 7, изменяется и перепад давления в нем, а, следовательно, и давление на правом торце золотника 9. Под действием разкости давлений на правом и левом торце золотник начинает двигаться до тех пор, пока давления не выравняются. Следовательно, перепады давлений на дросселях 7 и I5 по око чании переходного процесса равны и расход через эти дроссели определяется лишь их проводимостью. Заполнение гидрополостей мультипликатора 1 происходит через обратные клапаны 12 (если поршень 2 движется влево) или 13 (если поршень 2 движется вправо) из компенсационного бачка 14. Использование изобретения позволит обеспечить желаемую точность позиционирования гидродв гателя и перемещаемого объекта. Формула изобретения 1. Пневмогидравлический цифровой позиционный привод, содержащий пневмогидравлический мультипликатор, напорные полости которого сообще1Ш с гидродвк ателем через цифровой задатчик координаты, и распределительную аппаратуру, включающую мост обратных клапанов и гидравлический распределитель, а также компенсационную емкость, при этом цифровой задатчик включает гидрокамеру со штоковой и бесштоковой полостями, о тличающийся тем, что, с целью обеспечения точности позиционирования, он дополнительно содержит двухкамерный делитель потока, постоянный и регулируемый дроссели, обратный клапан и управляемый обратный клапан, при этом одна из полостей делителя потока сообщена через постоянный дроссель с выходом моста обратных клапанов и с гидравлическим распределителем, а другая - через регулируемый дроссель с выходом моста обратных клапанов и через обратный клапан параллельно с бесштоковой гидрополостью цифрового задатчика и с входом управляемого обратного клапана, выход которого сообщен с компенсационной емкостью, а управляющая камера - с источником сжатого газа. 2.Привод по п. I, отличающийся тем, что сливная полость гидродвигателя сообщена через дополнительный обратный клапан с компенсационной емкостью. 3.Привод по п. 1, о т л и ч аю щ и и с я тем,что гидрокамера цифрового задатчика со стороны штоковой полости снабжена концевым выключателем. Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельст)ао СССР о заявке № 2763858/25-08, кл. В 23 Q 5/26, 1979.
