Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока в системе подчиненного регулирования, преимуществен но для крупных радиотелескопов, в которых момент трения в коренном зацеплении меняется в зависимости от угла поворота антенны и внешней нагрузки. Устройство может быть использовано в электроприводах различных механизмов и машин, в которых момент трения не является постоянной величиной.
Цель изобретения - повышение точности регулирования скорости.
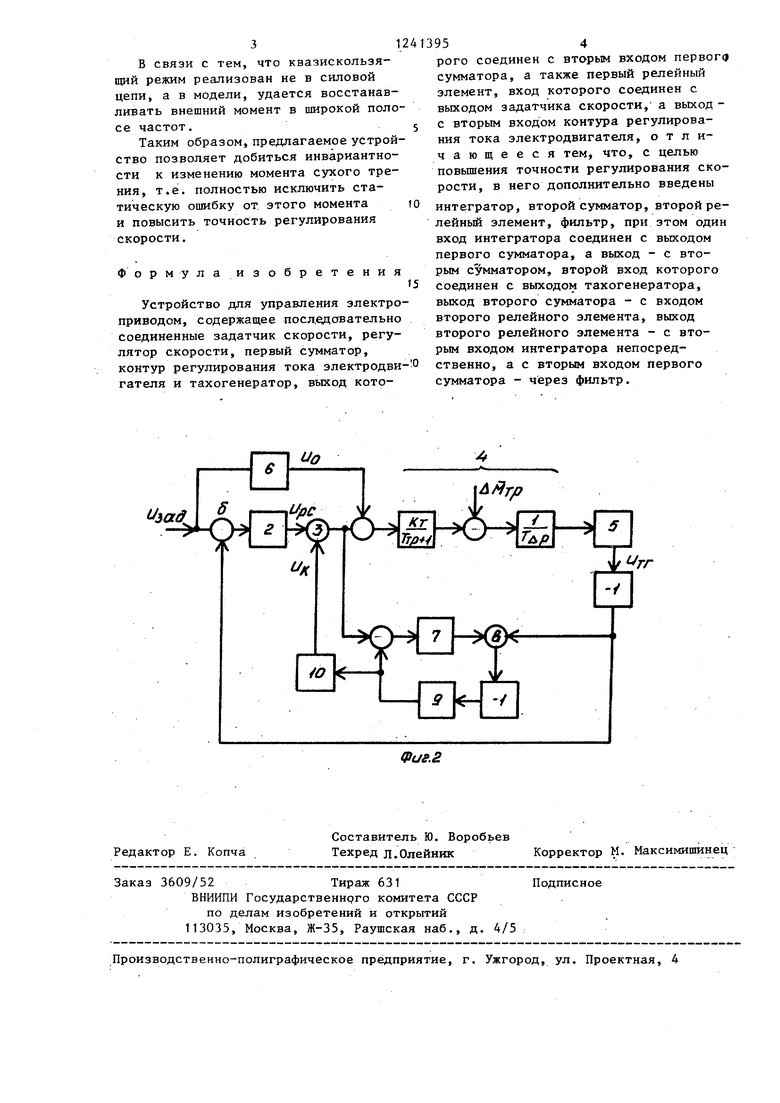
На фиг. 1 и 2 схематично изображено предлагаемое устройство.
Устройство содержит последовательно соединенные задатчик 1 скорости, регулятор 2 скорости, первый сумматор 3, контур 4 регулирования тка электродвигателя и такогенератор соединенный с вторым, входом первого сумматора 3, и релейный элемент 6, включенный между выходом задатчИка 1 скорости и входом контура 4 регулирования тока, а также интегратор 7, второй сумматор 8, второй релейный элемент 9 и фильтр 10. Один вход интегратора 7 соединен с выходом первого сумматора 3, а выход - с вторым сумматором 8, второй вход которого соединен с выходом тахогенератора
5, выход второго сумматора 8 соединен 35 нальная изменению этого момента
с выходом второго релейного элемента 9, выход второго релейного элемента 9 соединен с вторым входом интегратора 7 непосредственно, а с вторым входом первого сумматора 3 - через фильтр 10.
Устройство работает следующим образом.
Напряжение ошибки с выхода первого сумматора 3 подается на вход контура 4 регулирования тока и на вход дополнительного канала, образованного интегратором 7, вторым сумматором 8, вторым релейным элементом 9 и фильтром 10.
Рассмотрим структурную схему устройства, изображенного на фиг.2. Схема составлена при следующих допущениях: контур тока считаем апе- риодическим с постоянной времени Tf и коэффициентом перехода от зада- напряжения на его входе к моменту двигателя Кг. Тахогенератор
-1 М Тр ,
Д . Кг- Крс
В результате на входе модели
40 тегратора 7 появляется напряжени , а на выходе релейного мента 9 - постоянная составляюща равная напряжению Upc., т.е. проп ональная изменению момента трени
4S При использовании релейного элем с достаточно большим (сотни тыся коэффициентом усиления частота р ного скольязящего режима достато высока и постоянная времени филь
50 используемого .цля выделения пост ной составляющей, может быть выб на достаточно малой (на порядок ше постоянной времени токового к тура) .
55 Вьщеленный сигнал вводится на
вход первого с:у 1матора, образуя и риантный к изменению момента тре канал.
о5,
2413952
описывается безынерционным звеном с коэффициентом Ктг, регулятор скорости - пропорциональный с коэффициентом передачи Крс- Механичес5 кая постоянная времени двигателя обозначена Тд.
Напряжение с выхода первого сумматора 3 поступает на вход интегратора 7, который представляет собой
10 линейную модель механической части электродвигателя. Динамика токового контура в модели не учитывается, так как его быстродействие в системе подчиненного регулирования зна15 чительно больше быстродействия контура скорости.
При точной компенсации сухого трения напряжение:м нелинейного элемента 6 напряжение на выходе сумматора
20 3 равно нулю, а скорость двигателя (напряжение тахогенератора 5) точно соответствует напряжению задатчика 1 скорости. В модели существует скользя- ощй режим, характеризуемый возникно25 вением в этом контуре колебаний высокой частоты. При этом выходное напряжение интегратора 7 абсолютно точно соответствует напряжению тахо- .генерат-ора 5.
30 при изменении момента трения относительно уровня, на которьй настро ен канал с первым релейным элементом 6, в исходной системе возникает статическая ошибка i, пропорцио-1 М Тр ,
Д . Кг- Крс
В результате на входе модели интегратора 7 появляется напряжение , а на выходе релейного элемента 9 - постоянная составляющая, равная напряжению Upc., т.е. пропорциональная изменению момента трения.
При использовании релейного элемента с достаточно большим (сотни тысяч) коэффициентом усиления частота реального скольязящего режима достаточно высока и постоянная времени фильтра,
используемого .цля выделения постоянной составляющей, может быть выбрана достаточно малой (на порядок меньше постоянной времени токового контура) .
Вьщеленный сигнал вводится на
вход первого с:у 1матора, образуя инвариантный к изменению момента трения канал.
31
В связи с тем, что квазискользящий режим реализован не в силовой цепи, а в модели, удается восстанавливать внешний момент в широкой полосе частот.
Таким образом, предлагаемое устройство позволяет добиться инвариантности к изменению момента сухого трения, т.е. полностью исключить статическую ошибку от этого момента и повысить точность регулирования скорости.
Формула изобретения
Устройство для управления электроприводом, содержащее посл.еяовательно соединенные задатчик скорости, регулятор скорости, первый сумматор, контур регулирования тока электродви гателя и тахогенератор, выход кото954
рого соединен с вторым входом первог(| сумматора, а также первый релейный элемент, вход которого соединен с выходом задатчика скорости, а выход - с вторым входом контура регулирования тока электродвигателя, отличающееся тем, что, с целью повьшения точности регулирования скорости, в него дополнительно введены
интегратор, второй сумматор, второй релейный элемент, фильтр, при этом один вход интегратора соединен с выходом первого сумматора, а выход - с вторым сумматором, второй вход которого соединен с выходом тахогенератора, выход второго сумматора - с входом второго релейного элемента, выход второго релейного элемента - с вторым входом интегратора непосредственно, а с вторым входом первого сумматора - через фильтр.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для стабилизации натяжения нитей при перемотке | 1985 |
|
SU1279934A1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| Электропривод робота | 1989 |
|
SU1717335A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Система регулирования скорости | 1983 |
|
SU1092465A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока различных механизмов в которых момент трения не является постоянной величиной. Цель изобретения - повышение точности регулирования скорости. Устройство содержит задатчик скорости 1, регулятор скорости 2, первый сумматор (С) 3, контур регулирования тока электродвигателя 4, тахогенератор 5, релейный элемент (РЭ) 6, Введение интегратора 7, второго.С 8, релейного элемента 9 и фильтра 10 позволяет добиться инвариантности к изменению момента сухого трения, таким образом полностью исключить статическую ошибку от этого момента. При использовании РЭ 9 с достаточно большим коэффициентом усиления частота реального скользящего режима достаточно высока и постоянная времени фильтра может быть выбрана достаточно малой. 2 ил. 1(Л 1C ни 00 со СП
V-O
ю
- - l 7j- ® Редактор Е. Копча
Составитель Ю. Воробьев
Техред л.Олейник Корректор М. Максимишинец
Заказ 3609/52Тираж 631
ВНИИПИ Государственнрго комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг,2
Подписное
| Хлыпало Е.И | |||
| Нелинейные корректирующие устройства в автоматических системах | |||
| Л.: Энергия, 1973, с.237- 240 | |||
| Патент США № 3458791 ,кл.Н 02 Р 5/06, 1969. |
