v
со с: 4; со
о:
Фи91
113
Изобретение относится к устройствам для измерения сил, крутящих моментов и веса объектов, например в устройствах для взвешивания подвиж- ных объектов: автомобилей, железнодорожного состава и других объектов в статическом положении и при движении.
Цель изобретения - повышение точ- ности.
На фиг. 1 изображена конструкция датчика в равновесном напряженном состоянии; на фиг. 2 - эпюра напряжений в упругих элементах в равно- весном напряженном состоянии, сече- чение А-А на фиг. I; на фиг. 3 - эпюра напряжений при действии наибольшего момента внешней силы или крутящего момента; на фиг. 4 - график тео ретической характеристики датчика (F).
Датчик состоит из двух торсионных валов, представляюш,их собой внутренний упругий чувствительный элемент 1 выполргенный в виде сплошного или полого стержня, соосно расположенный внутри внешнего цилиндрического упругого элемента 2,
На рабочей части одного или обоих упругих элементов наклеены тензоре- зисторы 3.
К одному или обоим концам упругих элементов прикреплены силовводящие элементы 4, к которым прикладывается внешняя сила F или крутящий момент
М,р.
Внутренний 1 и внешний 2 упругие элементы скреплены между собой по концам. Сначала упругие элементы скрепляются между собой на одном конце любым известным способом: шпоночным соединением, шлицевым, сваркой и т.д. Затем этот конец закрепляется в жесткой неподвижной опоре, а к од- ному из свободных концов упругого элемента 1 или 2 прикладывается внешняя сила F или крутящий момент . В результате приложения силы или крутящего момента производится закручивание первого упругого элемента относительно второго на угол, соответствующий максимальному расчетному значению касательных напряжений в рабочей части этого упругого элемента.
После достижения закручивания первого упругого элемента на заданный угол оба урпугих элемента скрепляются между собой со стороны конца, к
которому были приложены внешняя сила F или момент , а затем эта сила F или момент , снимаются.
В результате освобождения упругих элементов от действия внешней силы часть потенциальной энергии деформирования закрученного упругого элемента передается на второй и производит его закручивание в противоположном направлении до равновесного состояния обоих элементов. Оба упругих чувствительных элемента становятся предварительно напряжены внутренними силами противоположного знака.
Такое состояние упругих элементов повышает точность измерения за счет уменьшения величины гистерезиса и уменьшения времени затухания упругих колебаний датчика.
Работа датчика заключается в следующем.
Скрепленные между собой упругие эле менты 1 и 2 находятся в равновесном напряженном состоянии. При этом в рабочих частях возникают касательные напряжения разного знака, т.е. упругие элементы находятся в закрученном состоянии на определенный угол, но каждый в противоположном состоянии.
В теле упругих элементов возникает потенциальная энергия деформированного состояния, величина которой соответственно пропорциональна углу закручивания каждого элемента и величине касательных напряжений в состоянии равновесия.
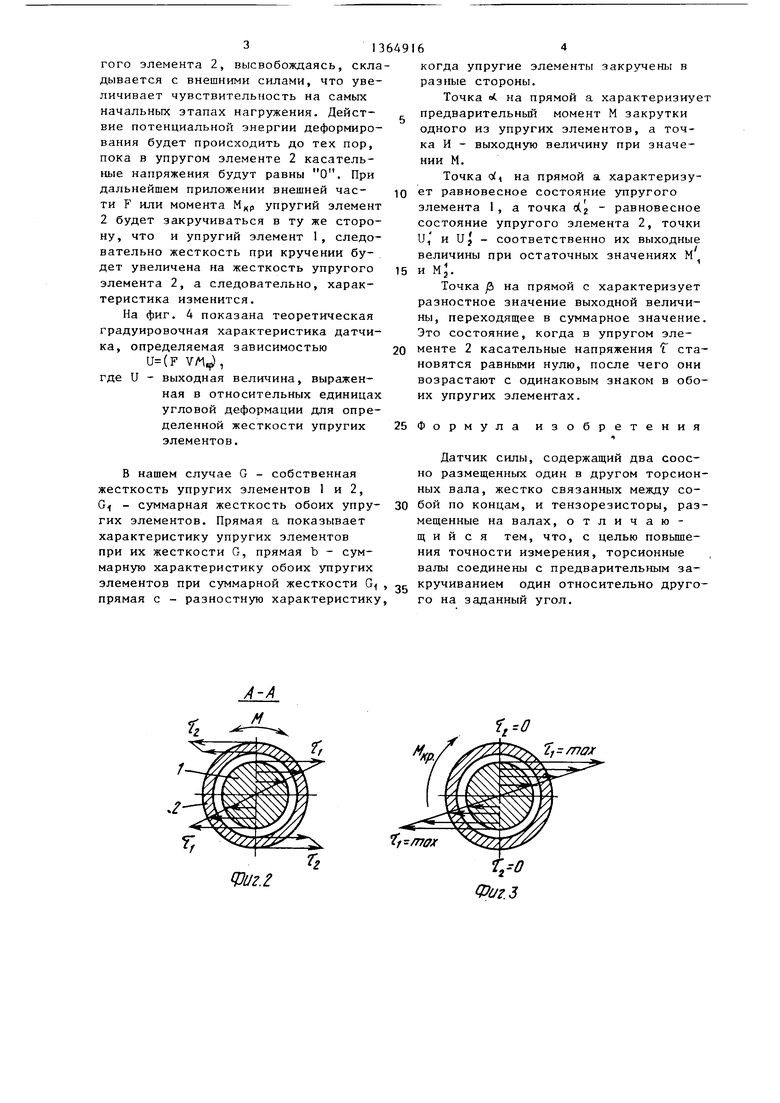
На фиг. 2 изображена эпюра напряжений в упругих элементах в состояни равновесия, при этом С касательные напряжения рабочей части упругого элемента 1 , Г2 касательные напряжения рабочей части упругого элемента 2. Эпюра показывает, что касательные напряжения направлены в противоположные стороны, т.е. имеют разные знаки.
При приложении внешней силы или момента в направлении, указанном на фиг. 3, напряжения { увеличиваются до максимального расчетного значения, а напряжения Т, второго упругого элемента уменьшаются и достигают в определенный момент нулевого значения.
С момента приложения внешней силы или момента М потенциальная энергия деформированного состояния упру
31
того элемента 2, высвобождаясь, складывается с внешними силами, что увеличивает чувствительность на самых начальных этапах нагружения. Действие потенциальной энергии деформирования будет происходить до тех пор, пока в упругом элементе 2 касательные напряжения будут равны О. При дальнейшем приложении внешней части F или момента упругий элемент 2 будет закручиваться в ту же сторону, что и упругий элемент 1, следовательно жесткость при кручении будет увеличена на жесткость упругого элемента 2, а следовательно, характеристика изменится.
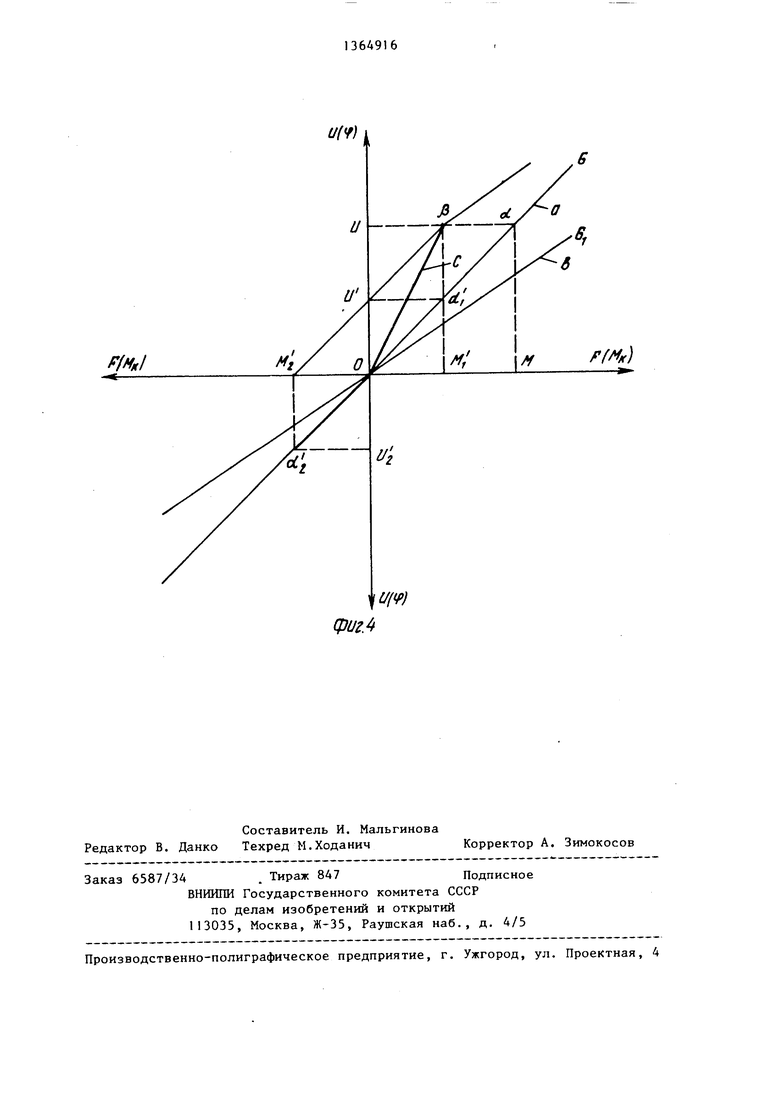
На фиг. 4 показана теоретическая градуировочная характеристика датчика, определяемая зависимостью
U(F VAli,
где и - выходная величина, выраженная в относительных единицах угловой деформации для определенной жесткости упругих элементов.
0
9
164
когда упругие элементы закручены в разные стороны.
Точка вС на прямой а характеризиует предварительный момент М закрутки одного из упругих элементов, а точка И - выходную величину при значении М.
Точка о на прямой а характеризует равновесное состояние упругого элемента 1 , а точка оС равновесное состояние упругого элемента 2, точки и, и Uj - соответственно их выходные величины при остаточных значениях М и Mj.
Точка р на прямой с характеризует разностное значение выходной величины, переходящее в суммарное значение. Это состояние, когда в упругом элементе 2 касательные напряжения Т становятся равными нулю, после чего они возрастают с одинаковым знаком в обоих упругих элементах.
5
0
25 Формула изобретения
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРСИОННАЯ ПРУЖИНА | 2013 |
|
RU2534288C1 |
| РЕССОРНОЕ ПОДВЕШИВАНИЕ РАМЫ ТЕЛЕЖКИ ЖЕЛЕЗНОДОРОЖНОГО ЭКИПАЖА | 2002 |
|
RU2224664C2 |
| РЕССОРНОЕ ПОДВЕШИВАНИЕ РАМЫ ТЕЛЕЖКИ СПЕЦИАЛИЗИРОВАННОГО ГРУЗОВОГО ВАГОНА | 2002 |
|
RU2224665C2 |
| ТОРСИОННЫЙ СТЕРЖНЕВО-ТРУБЧАТЫЙ УПРУГИЙ ЭЛЕМЕНТ ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2522773C1 |
| Способ контроля толщины металлизации кварцевого чувствительного элемента маятникового компенсационного акселерометра | 1989 |
|
SU1783447A1 |
| СПОСОБ ПОГРУЖЕНИЯ ВИНТОВОЙ СВАИ В ГРУНТ И ВИНТОВАЯ СВАЯ, ПОГРУЖАЕМАЯ ДАННЫМ СПОСОБОМ | 2003 |
|
RU2244065C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ ЦИЛИНДРИЧЕСКИХ ОБРАЗЦОВ НА КРУЧЕНИЕ | 2008 |
|
RU2379649C2 |
| Способ обработки резанием вращающейся детали и устройство для его осуществления | 1983 |
|
SU1222419A1 |
| Круглая пластинчатая пружина | 1990 |
|
SU1716212A1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ МНОЖЕСТВЕННЫХ ПАРАМЕТРОВ ТУРБОМАШИННОЙ СИСТЕМЫ | 2009 |
|
RU2513646C2 |
Изобретение м.б. использовано в устр-вах для взвешивания подвижных объектов и позволяет повысить точность измерений. Датчик состоит из двух торсионных валов, представляющих собой соосно размещенные один в другом упругие чувствительные элементы 1 и 2. При соединении элементов 1 и 2 они предварительно закручиваются относительно друг друга на угол, соответствующий макс, расчетному значению касательных напряжений в их рабочей части. С момента приложения внешней силы она складывается с потенциальной энергией деформированного состояния элементов 1 и 2. На рабочей части элементов 1,2 наклеены тензорезисторы 3. 4 ил. с $ (Л
В нашем случае G - собственная жесткость упругих элементов 1 и 2, G - суммарная жесткость обоих упру- гих элементов. Прямая а показывает характеристику упругих элементов при их жесткости G, прямая Ъ - суммарную характеристику обоих упругих элементов при суммарной жесткости G , прямая с - разностную характеристику.
5
Г,
4}иг.2
Датчик силы, содержащий два соос- но размещенных один в другом торсионных вала, жестко связанных между собой по концам, и тензорезисторы, размещенные на валах, отличающийся тем, что, с целью повьш1е- ния точности измерения, торсионные валы соединены с предварительным закручиванием один относительно другого на заданный угол.
ff /77ffjr
w
м.
ери г. 4
/у
/ //v j
| Макаров Р.А | |||
| и др | |||
| Тензометрия в машиностроении, М.: Машиностроение, 1975, с | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения искусственного меда | 1931 |
|
SU31838A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
