s
со
О Oi
СО
00
со
N)
Изобретение относится к манипуляторам для механизации и автоматизации производственных процессов, содержащих подъемно-транспортные операции, а именно к исполнительным устройствам манипуляторов.
Целью изобретения является повышение кинематической точности путем устранения зазоров в зубчатых зацеплениях.
На фиг,1 показано исполнительное устройство манипулятора, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг И-, на фиг. 4 - сечение В-В на фиг.З; на фиг.З - сечение Г-Г на фиг.З; на фиг.6 - сечение Д-Д на фиГоЗ.
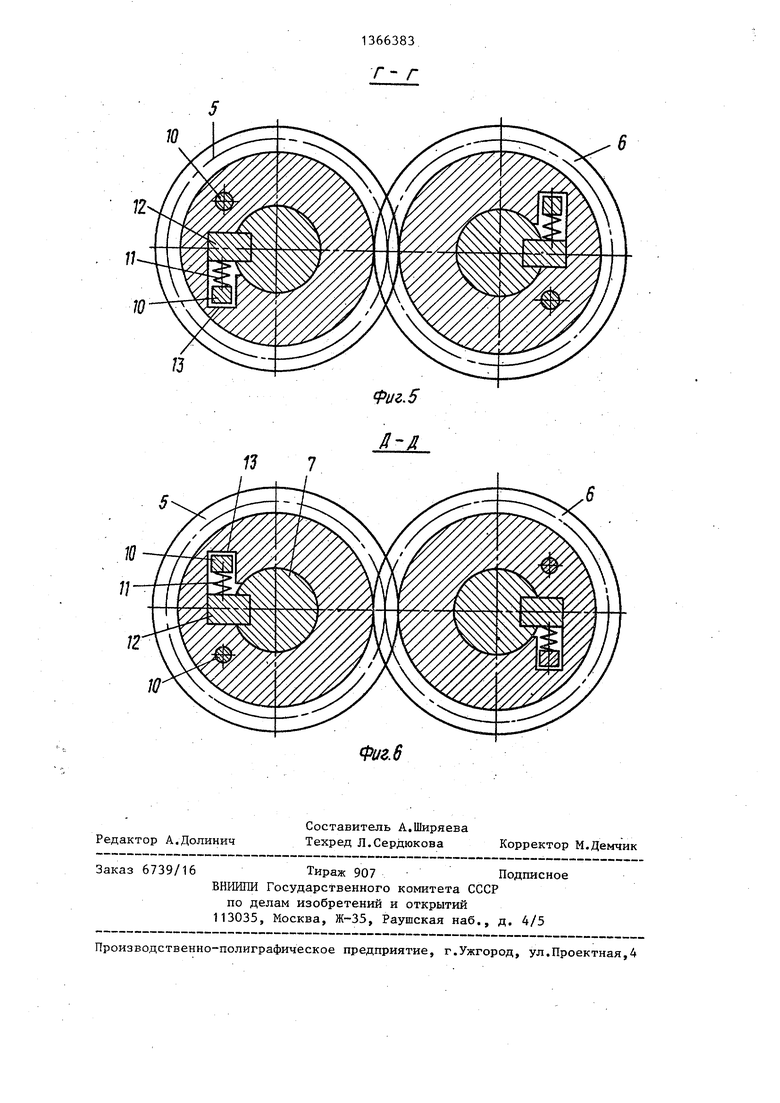
Исполнительное устройство манипузубчатых колесах блока (фиг, 4) Между шпонкой 12 и упором 10 находится пружина 11. Из фиг.З и 6 видно, что пазы в противолежащих зубчатых колесах 3 и 6 выполнены с противопо- ложных сторон шпонки 12.
Исполнительное устройство манипулятора работает следующим образом.
10 При повороте вала 4 от приводного двигателя по часовой стрелке одновременно поварачиваются в ту же сторону входная пара звеньев 2, а также первый и третий блок зубчатых колес 3 и
If 6, связанных со звеньями 2, При этом крутящий момент с вала 7 (фиг.6) передается нижней гранью шпонки 12 на ступицу левого дополнительного зуб- чатого колеса 6, далее зубчатым залятора содержит основание 1 и шарнир- 2о цеплением - на смежное (правое) зубчатое колесо .3 (вращается в противоположную сторону), на верхнюю грань шпонки 12, связанной с этим колесом, и на вал 7, связанный со звеном 8 вы- 25 ходного параллелограмма. Благодаря этому выходной параллелограмм поворачивается в противоположную сторону, а в связи с равенством межцентровых расстояний звеньев переходник 9 соно установленную на нем входную пару звеньев 2, а также корпус 3 механизма шарнирного соединения, образующие входной шарнирный параллелограмм. Вал 4 предназначен для подсоединения приводного двигателя (не показан) и соединен со звеном 2.
Механизм шарнирного соединения содержит четыре одинаковых зубчатых
чатое колесо .3 (вращается в противоположную сторону), на верхнюю грань шпонки 12, связанной с этим колесом, и на вал 7, связанный со звеном 8 вы- 25 ходного параллелограмма. Благодаря этому выходной параллелограмм поворачивается в противоположную сторону, а в связи с равенством межцентровых расстояний звеньев переходник 9 соколеса 3 и четыре одинаковых дополни- зо вершает прямолинейное движение на
тельных зубчатых колеса 6, расположенных попарно на общих валах 7, образуя между собой блоки. Зубчатые колеса 3 и дополнительные зубчатые колеса 6 находятся в зацеплении одни с другими, а каждая из осей как зубчатых колес 3, так и дополнительных зубчатых колес 6 расположена на одной геометрической оси.
Первый и третий (нечетные) блоки зубчатых колес связаны с входным шарнирным параллелограммом, а второй и четвертый (четные) блоки зубчатых колес - с выходным, образованным звеньями 8, корпусом 3 и переходником 9, к которому подсоединяется захватный орган. 1
Каждый из блоков зубчая-ых колес
включает механизм компенсации зазодлине, равной удвоенному межцентро- т вому расстоянию звеньев 2 (или звена 8) .
Ери повороте вала 4 против часовой стрелки в механизме шарнирного соеди- нения крутящий момент будет восприни- -маться противолежащими зубчатыми колесами 3, образующими блоки (фиг.З), верхней гранью шпонки 12 ведущего зубчатого колеса 6 (левого), зубчатым зацеплением, нижней гранью шпонки 12, связанной с правым зубчатым колесом 3, и передается на вал 7, связанный с выходным шарнирным параллелограммом.
При вращении в обе .стороны крутящий момент воспринимается жестким шпоночным соединением (шпонка 12 одной стороной запрессована в вал, а
40
45
второй взаимодействует со ступицей ров в зубчатых зацеплениях, выполнен- gO колеса), а пружины 11 обеспечивают ньм в виде двух упоров 10, двух пру- „остоянньй односторонний прижим зубь- жин 11 и шпонки 12 (фиг.4,3 и 6), связывающей зубчатые колеса 3 и 6 с их валами 7. На внутренних торцовых поверхностях каждого зубчатого коле- 55 са блока симметрично оси шпонки закреплены упоры 10. Свободные концы упоров 10 расположены в сквозных пазах 13, выполненных в противолежащихев колбе друг у другу, выбирая зазоры и компенсируя их износ, а также температурные деформации.
Формула изобретения
Исполнительное устройство манипулятора по авт. св. № 1202836, о т зубчатых колесах блока (фиг, 4) Между шпонкой 12 и упором 10 находится пружина 11. Из фиг.З и 6 видно, что пазы в противолежащих зубчатых колесах 3 и 6 выполнены с противопо- ложных сторон шпонки 12.
Исполнительное устройство манипулятора работает следующим образом.
При повороте вала 4 от приводного двигателя по часовой стрелке одновременно поварачиваются в ту же сторону входная пара звеньев 2, а также первый и третий блок зубчатых колес 3 и
6, связанных со звеньями 2, При этом крутящий момент с вала 7 (фиг.6) передается нижней гранью шпонки 12 на ступицу левого дополнительного зуб- ; чатого колеса 6, далее зубчатым зацеплением - на смежное (правое) зубцеплением - на смежное (правое) зубатое колесо .3 (вращается в противоположную сторону), на верхнюю грань шпонки 12, связанной с этим колесом, и на вал 7, связанный со звеном 8 вы- ходного параллелограмма. Благодаря этому выходной параллелограмм поворачивается в противоположную сторону, а в связи с равенством межцентровых расстояний звеньев переходник 9 совершает прямолинейное движение на
о вершает прямолинейное движение на
длине, равной удвоенному межцентро- т вому расстоянию звеньев 2 (или звена 8) .
Ери повороте вала 4 против часовой стрелки в механизме шарнирного соеди- нения крутящий момент будет восприни- -маться противолежащими зубчатыми колесами 3, образующими блоки (фиг.З), верхней гранью шпонки 12 ведущего зубчатого колеса 6 (левого), зубчатым зацеплением, нижней гранью шпонки 12, связанной с правым зубчатым колесом 3, и передается на вал 7, связанный с выходным шарнирным параллелограммом.
При вращении в обе .стороны крутящий момент воспринимается жестким шпоночным соединением (шпонка 12 одной стороной запрессована в вал, а
0
5
второй взаимодействует со ступицей колеса), а пружины 11 обеспечивают „остоянньй односторонний прижим зубь-
ев колбе друг у другу, выбирая зазоры и компенсируя их износ, а также температурные деформации.
Формула изобретения
Исполнительное устройство манипулятора по авт. св. № 1202836, о т личающееся тем, что, с лью повьшения точности за счет компенсации зазоров в зубчатых зацеплениях, механизм шарнирного соединения снабжен четырьмя одинаковыми дополнительными зубчатыми колесами, находящимися в зацеплении и установленными на соответствующих осях зубчатых колес этого механизма, образуя с по- следними блоки, каждый из этих блоков снабжен механизмом компенсации
зазоров в зубчатых зацеплениях, вы- полненным в виде двух упоров, двух пружин и шпонки, связывающей зубчатые колеса с их валом, при этом на внутренних торцовых поверхностях каждого зубчатого колеса блока симметрично оси шпонки закреплены упоры, свободные, концы которых расположены в сквозных пазах, выполненных в соответствующих зубчатых колесах, и подпружинены относительно шпонки.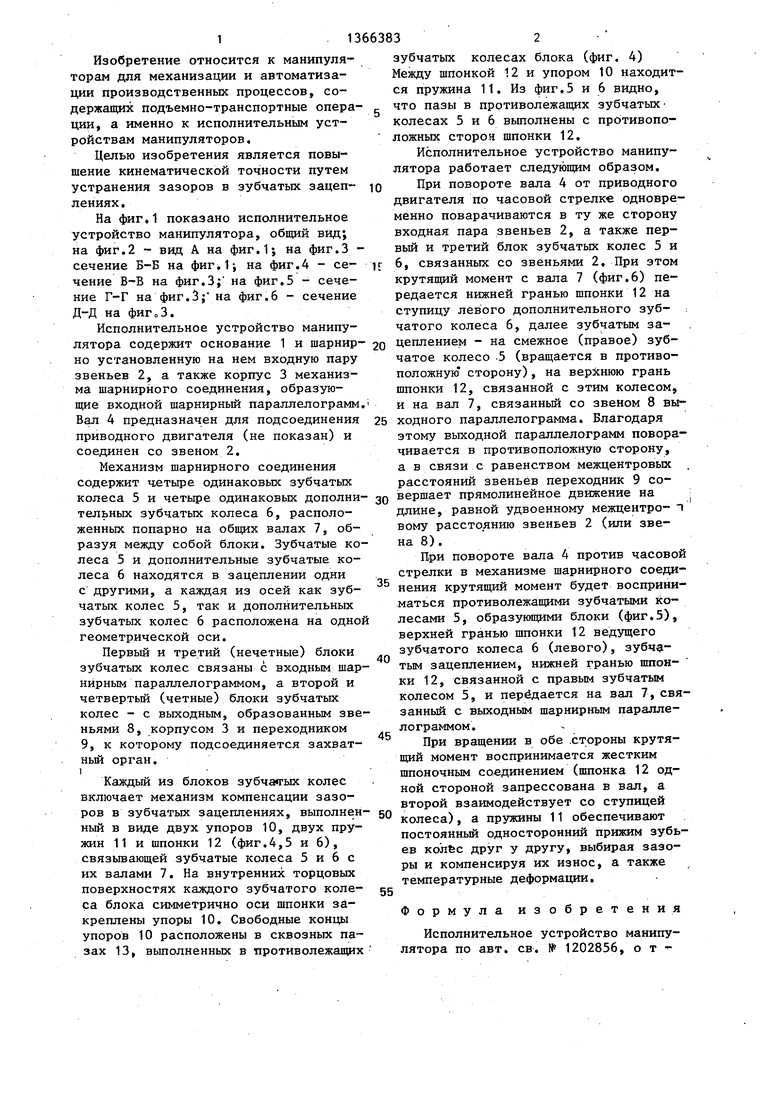
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
| Рука манипулятора | 1977 |
|
SU878577A1 |
| Устройство для прямолинейного перемещения исполнительного органа | 1988 |
|
SU1714258A1 |
| Межвалковый механизм двухвальцевой мельницы | 1979 |
|
SU854432A1 |
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| Движитель транспортного средства | 1979 |
|
SU831656A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| Устройство включения привода проволокошвейной машины | 1988 |
|
SU1567398A1 |

Изобретение относится к манипуляторам для механизации и автоматизации производственных процессов, содержащих подъемно-транспортные операции. Целью изобретения является повышение точности за счет уменьшения зазоров в зубчатых зацеплениях. Для этого механизм шарнирного соединения снабжен четырьмя одинаковыми дополнительными зубчатыми колесами 6, установленными на осях четырех одинаковых зубчатых колес 5, образуя с последними блоки. Каждый блок включает механизм компенсации зазоров в зубчатом зацеплении, вьшолненный в виде шпонки, дцух пружин и двух упоров, закрепленных на внутренних торцовых сторонах зубчатых колес блока симметрично оси шпонки, а свободные концы их расположены в сквозных пазах, выполненных в противолежащих зубчатых колесах, и подпружинены относительно шпонки, что позволяет при вращении зубчатых колес в разные стороны выбирать зазоры в зубчатом зацеплении. 6 ил. iS (Л
В
Фиг. 6
| Исполнительное устройство манипулятора | 1984 |
|
SU1202856A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
